




























Deployable Autonomy Technologies Group
Overview
As its name implies, the Deployable Autonomy Technologies (DAT) group marries automation, AI, and robotics technologies with prototype space systems that must operate autonomously – at least some of the time – when deployed to specific planetary mission locations. This broad umbrella includes planetary surface instruments, drilling and sampling, modeling and visualizing the deployed environments, manipulating in-situ resources and robotic local construction. DAT does not focus on mobility in robotics – we collaborate and team with others if we need to rove, fly, or hop somewhere in order to deploy our systems. We conduct conceptual research up through the development of flight prototypes suitable for mission proposals.
We believe strongly that humans unconsciously (or consciously) lack rigor in adequately testing future autonomous space systems; so we test our projects in extreme environments and analog sites (such as Haughton Crater, Chile’s Atacama Desert; or the Dry Valleys, Antarctica), as well as in conventional thermal vacuum chamber testing at NASA testbeds.
We have expertise in robotic swarms, board-level hardware controls up to multi-agent system-level supervisory controls, science data visualization, design and implementation of model-based and hybrid diagnostics, automated drilling, and data integration technologies of multiple heterogeneous agents, in one operating theater: spacecraft instruments/subsystems, surface exploration agents (humans, rovers, instruments, robots), as well as past projects in air traffic (aircraft, controllers, airspace domains).
DAT Laboratories
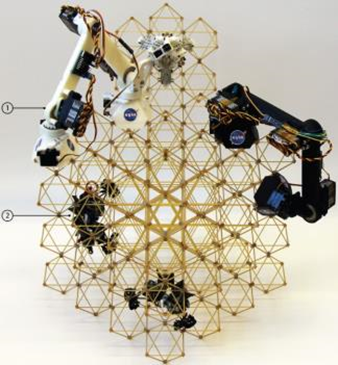
Coded Structures Lab (CSL)
CSL studies and develops autonomous metamaterials and structural systems (multi-robot assembly and reconfiguration with structural building blocks) in support of future exploration.
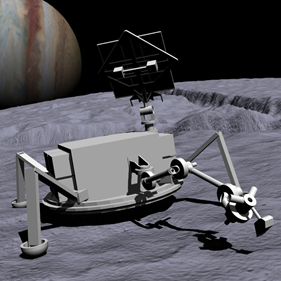
Drilling and Automated Sample Acquisition (DASA) Lab
DASA pursues automation of the human “art of drilling” and/or acquiring samples for planetary/Lunar surface science missions and In-Situ Resource Utilization (ISRU). We study the means of surface constructs using local materials – reinforced “Lunarcrete” or “Marscrete” using simulants and modeling.

Mission Planning, Simulation and science visualization Lab (MPSL)
MPSL creates planetary visual planning and mapping software, science data visualization, image processing technologies, and mission simulation testbeds.
Team
Group (and DASA) Lead
Brian Glass
CSL Lead
Kenny Cheung
CSL Deputy
Christine Gregg
– ARC Engineering Systems Division
MPSL Lead
Laurence Edwards
Members
Jessica Black
Damiana Catanoso
Olivia Formoso
Benjamin Jenett
Brielle King
Humon Moeen
In-Won Park
Sarah Seitz
Thomas Stucky
Greenfield Trinh
M. Zdeblick
Alumni
Mohammed Al Salti
Edward Balaban
Jarren Baldwin
Dean Bergman
Mark Branson
Lee Brownston
Deniz Burnham
Howard Cannon
Scott Christa
Sandra Dashora
April Davis
Samantha Domville
Lori Haven
Sarah Huffman
Charles Lee
Ridthi Sanjanwala
Sarah Thompson
Kevin Wheeler