







.png?w=1024)












Intelligent Robotics Group
Archived Projects
Astrobee
Launched in 2019, the Astrobee free-flying robots operate inside the International Space Station alongside astronauts. Astrobee’s primary purpose is to host innovative guest science. It can also provide mobile camera views of crew activities and perform environmental surveys.
Learn More
Deep Earth Learning, Tools, and Analysis (DELTA) Toolkit
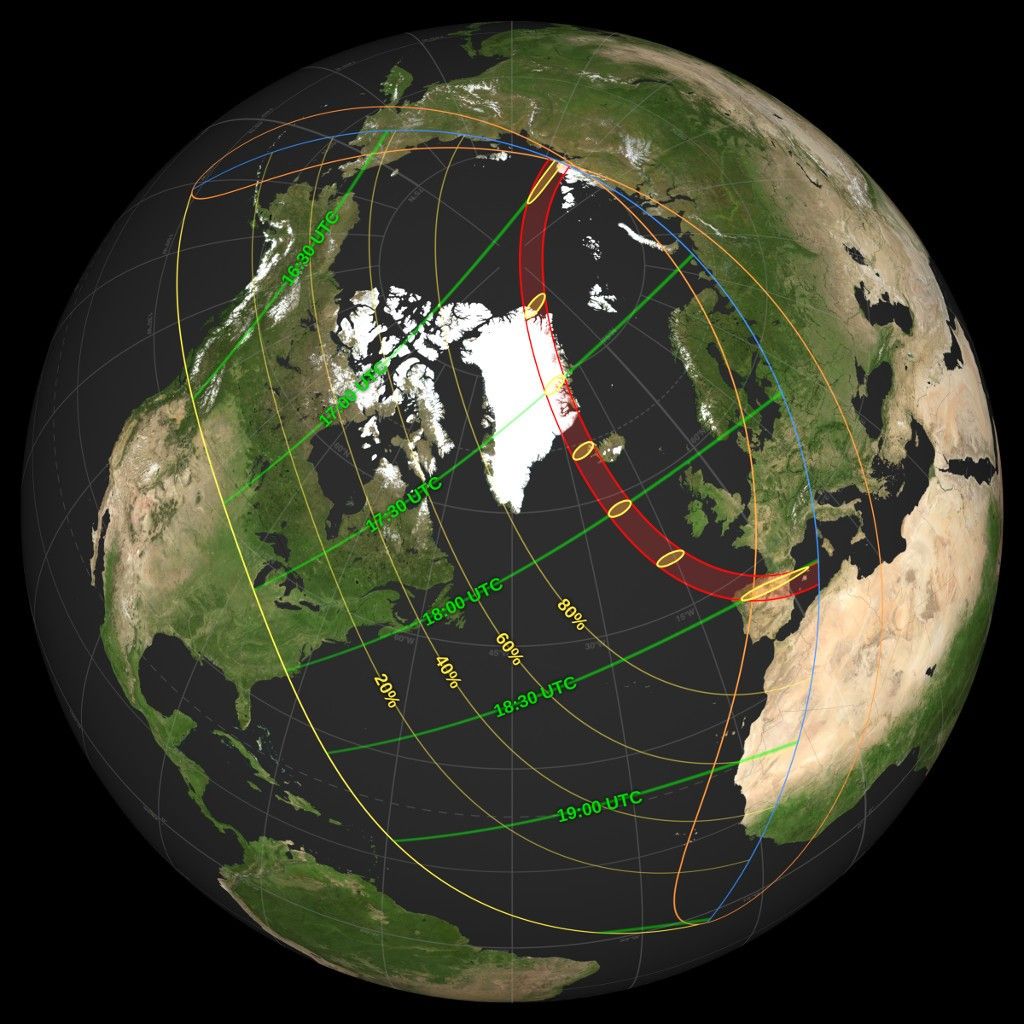
The Deep Earth Learning, Tools, and Analysis (DELTA) toolkit is an open-source toolkit for deep learning on satellite imagery developed in partnership with the U.S. Geological Survey (USGS) and National Geospatial-Intelligence Agency (NGA). DELTA empowers Earth science scientists to achieve state-of-the-art classification results with little-to-no knowledge of machine learning or computer programming. Initially, DELTA was trained and evaluated for mapping floods for disaster response and recovery. Other and potential uses include studying different natural disasters, changing land-use patterns, climate change, and more.
Learn More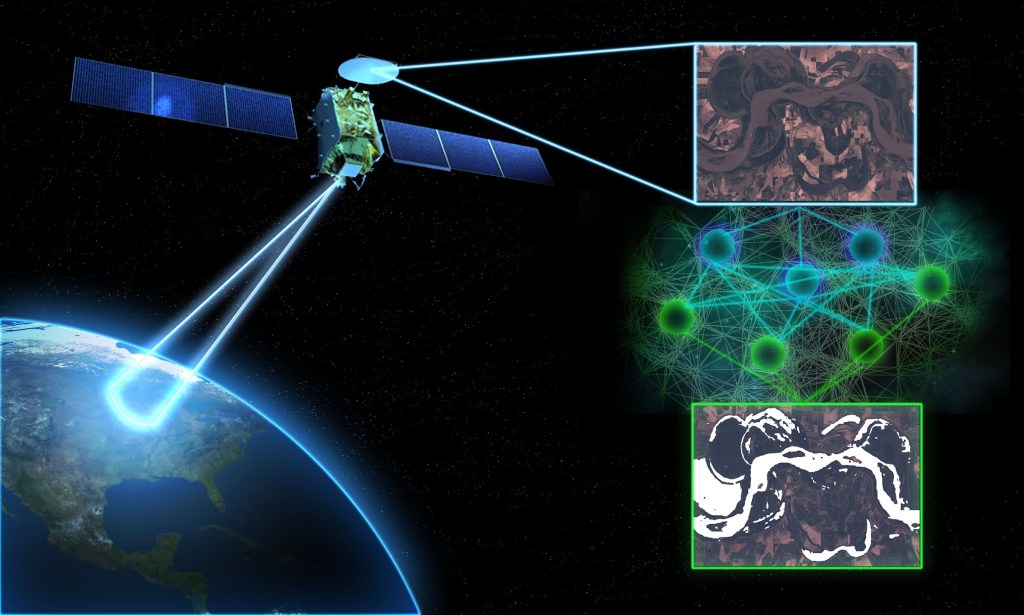
xGDS
The Exploration Ground Data System (xGDS) provides software tools to plan robot activities, monitor task execution, log robot telemetry, archive science data, and visualize a wide range of information. xGDS makes use of the NASA Ensemble mission operations architecture framework, web interfaces, and geospatial data browsers.
Learn More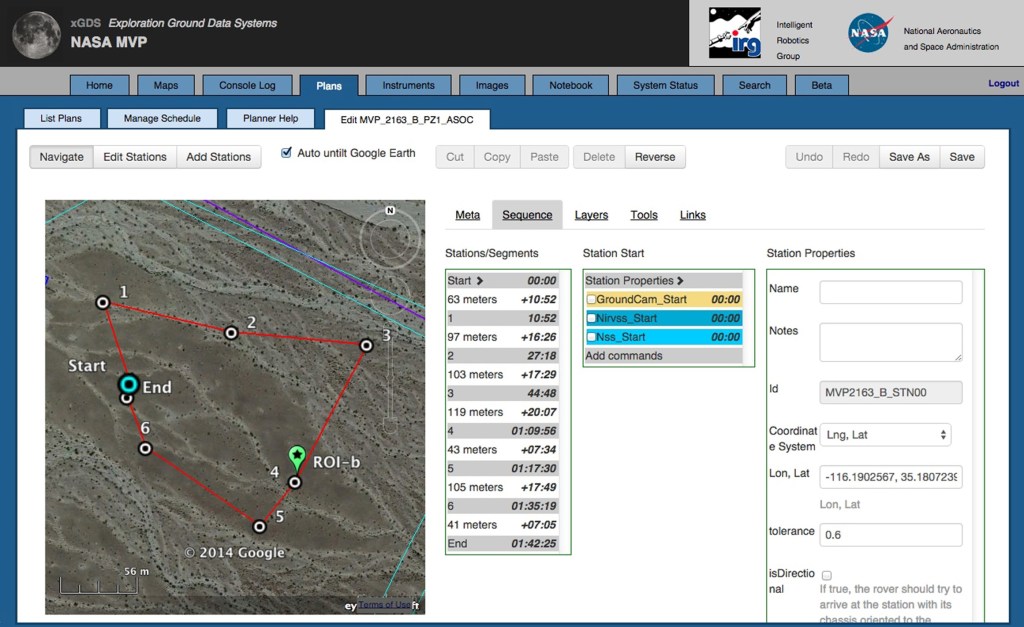
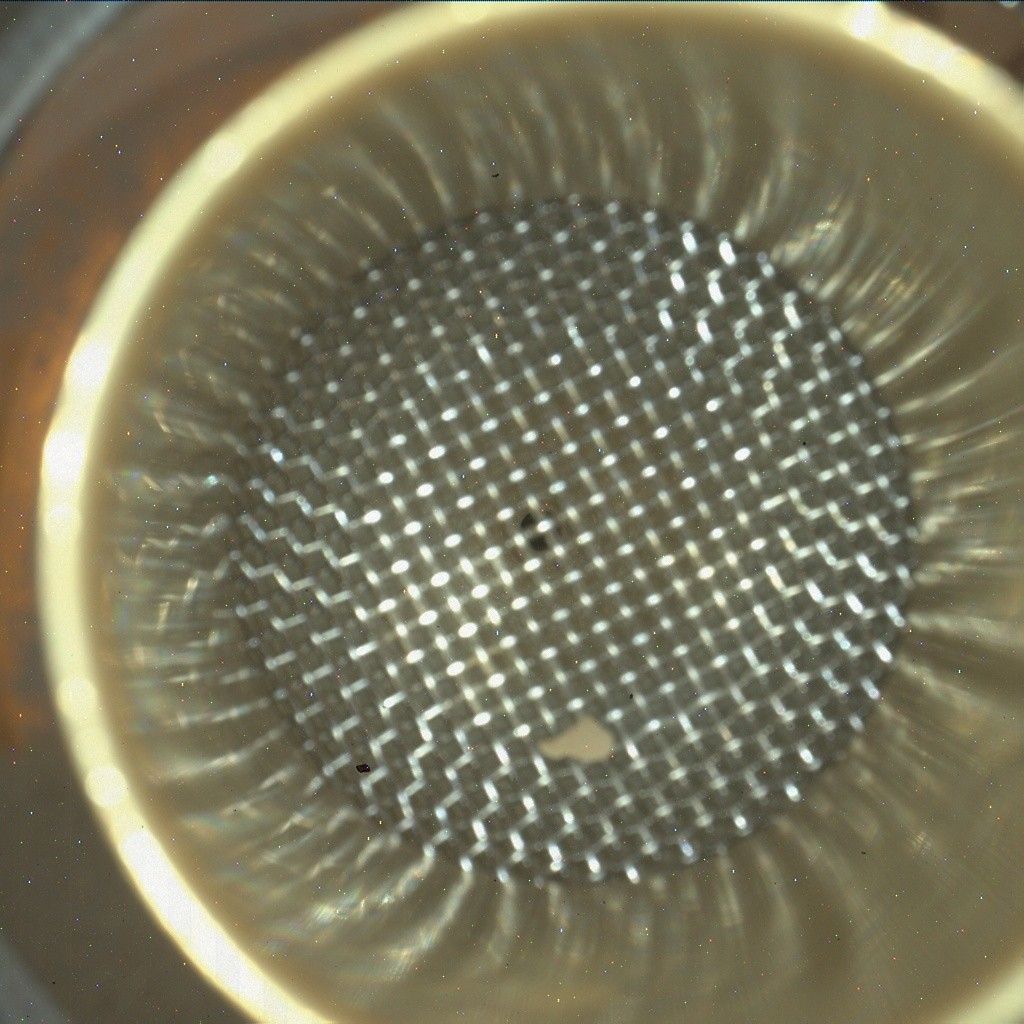
Extreme Perception
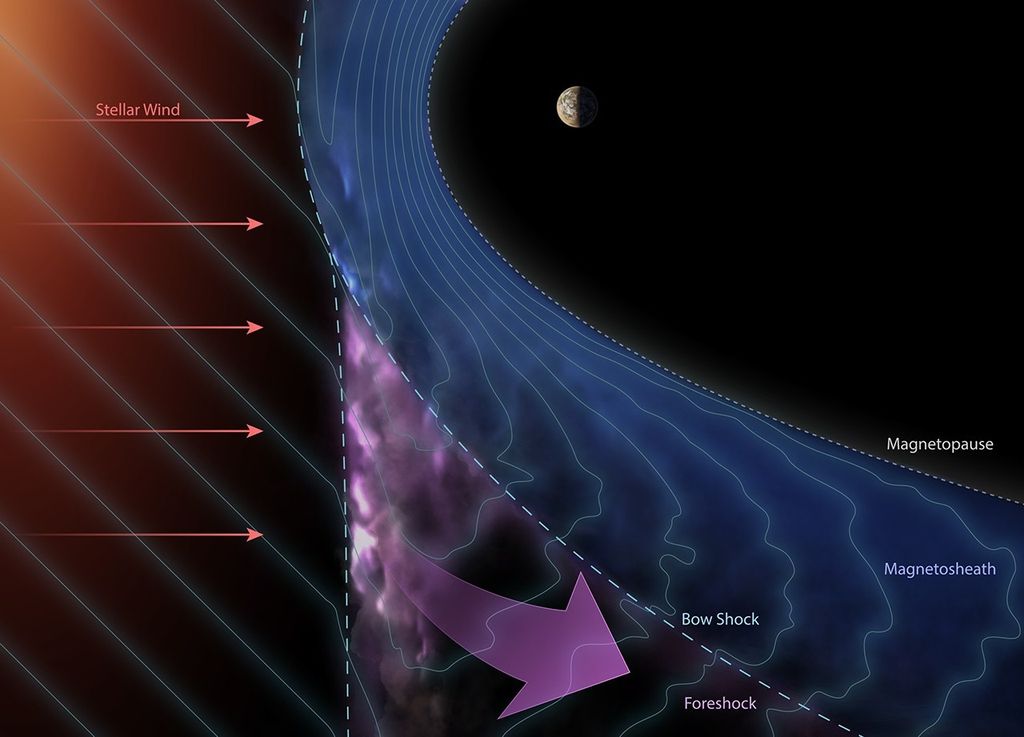
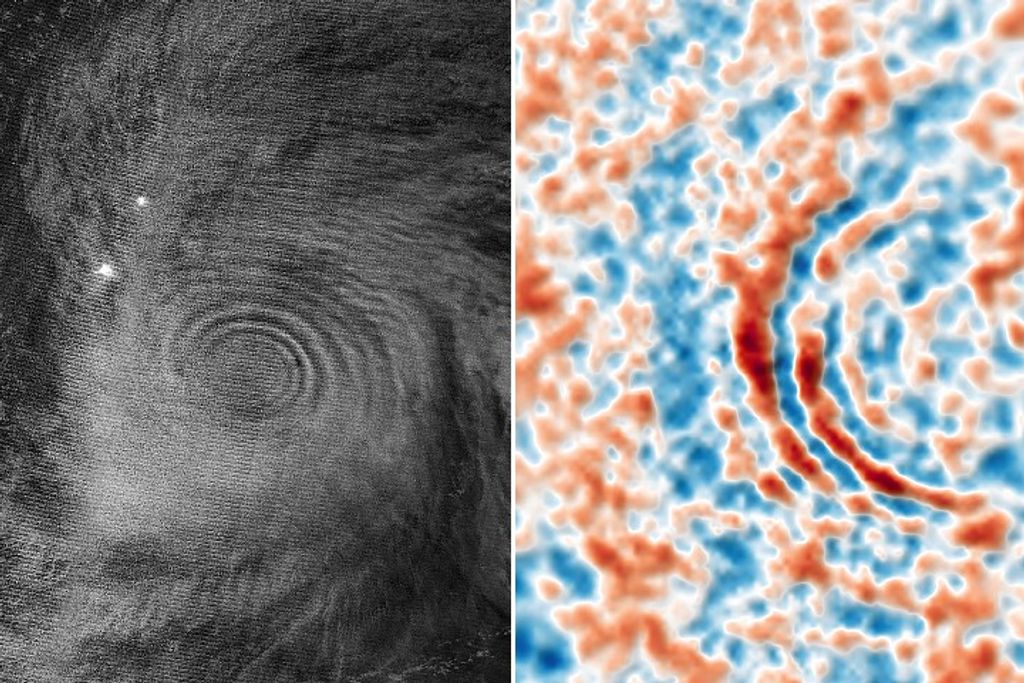
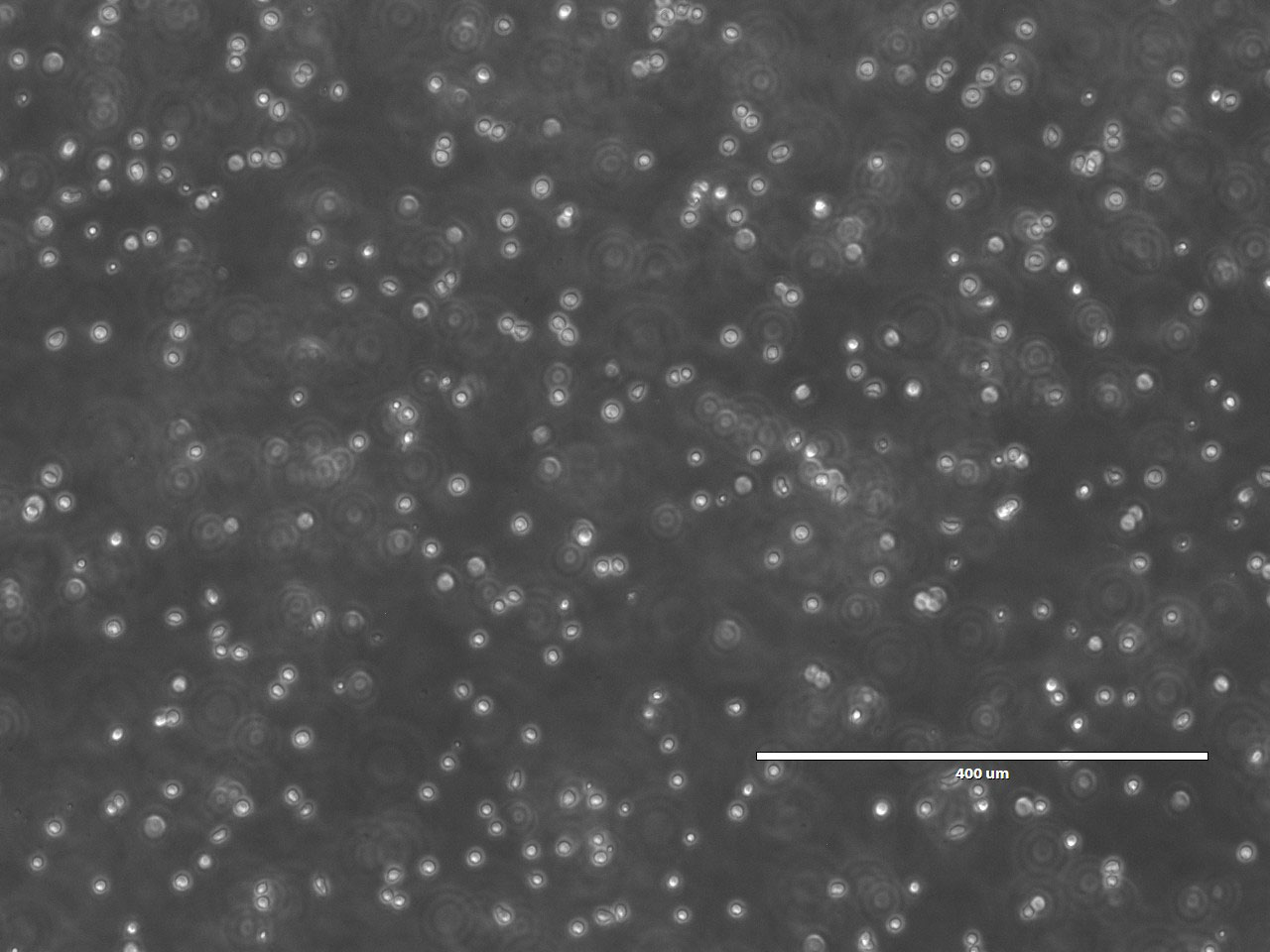
NASA’s future robotic exploration targets include spike-covered icy surfaces on Jupiter’s moon Europa, liquid methane lakes on Saturn’s moon Titan, and other environments that exist at the limits of imagination. IRG is developing novel sensors and a perception capability to enable robots to see in these extreme environments. Our approach blends elements of computer vision, optics, and physics-based simulation to understand planetary environments and target effective sensing modalities. We are also developing advanced decision-making and in-situ processing techniques to optimize information collected from our approaches. Technologies innovated by IRG include thermal vision-based navigation for landing on icy surfaces, cold-gas projectiles that map in ballistic flight and form monitoring networks once emplaced, and programmable microscopes that model individual grains of soil in 3D.
Learn More
Skylights and Caves Robotic Technologies
Skylights are gigantic sinkholes that might lead to intact caves on other planets. Exploration of these features is crucial for science, resource development, and future habitation throughout the solar system. IRG is developing robotic technologies for exploring subterranean environments — from life-detection payloads to automated mapping software — and testing them in field experimentation at terrestrial analog sites. IRG plans a technology demonstration by participating in the first commercially-led micro-rover mission to visit and circumnavigate one of the major lunar skylights.
Learn More
Tensegrity Robotics
Robots based on tensegrity structures have significant potential to reduce size, mass, and energy required for manipulation and mobility in space. Tensegrity structures are extremely lightweight, can be compactly stored for launch, are inherently compliant, and highly robust. Our work focuses on developing these highly non-linear structures to enable new science missions for extreme terrain locations.
Learn More