


















![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)






Intelligent Robotics Group
Recent Projects
VIPER
The Volatiles Investigating Polar Exploration Rover (VIPER) will travel to investigate a range of Ice Stability Regions (ISRs) across scales from hundreds of meters to kilometers and conduct a surface and subsurface assessment of lunar water and other volatiles. IRG is developing the onboard software, navigation systems, and rover robot-driving tools. We are also creating 3D lunar terrain maps from satellite images for mission planning and providing software to support high-tempo science operations.
Learn More
ISAAC
The Integrated System for Autonomous and Adaptive Caretaking (ISAAC) uses both Astrobee free-flying robots and the Robonaut 2 humanoid robot on the International Space Station to develop autonomous caretaking capabilities. These abilities will enable safe and reliable operation of future human spacecraft, such as the planned lunar-orbiting Gateway space station, especially during extended periods when astronauts are not present.
Learn More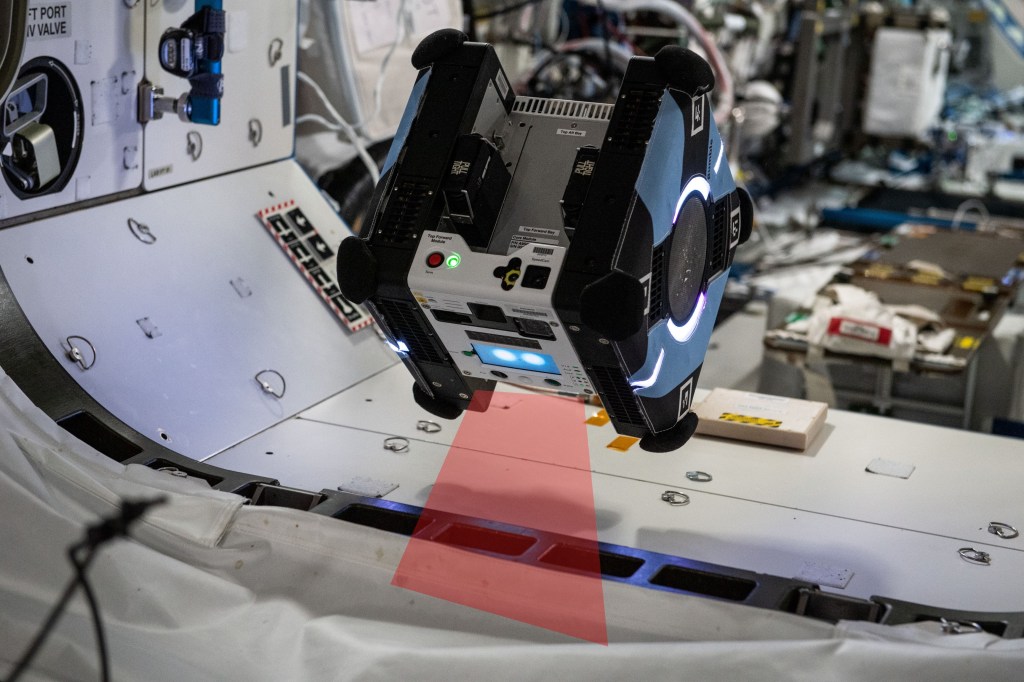
StreamFlow
A research group comprised of U.S. Geological Survey (USGS) and NASA scientists is working toward a new system to monitor rivers by inferring surface-flow velocities using thermal video acquired from a small Unmanned Aircraft System (sUAS). Ongoing efforts focus on deriving velocity information in real-time via embedded onboard computing, and facilitating quality control by quantifying the uncertainty associated with surface velocity estimates.
Learn More
Digital Terrain Models and the Ames Stereo Pipeline
Digital terrain models are essential for cartography, science analyses, and mission planning and operations. IRG has developed software that automatically generates high-quality topographic and albedo terrain models from satellite images. Our software uses multi-view geometry and photoclinometric techniques to produce 3D models with very high accuracy and resolution. The Ames Stereor Pipeline (ASP) is an open-source C++ framework for deriving, manipulating, and synthesizing terrain and shape data products. ASP has been used to create 3D terrain models for landing sites on Mars, topography on icy satellites and Kuiper Belt Objects (KBOs) in the outer solar system, as well as glaciers, mountains, and volcanoes here on Earth.
Learn More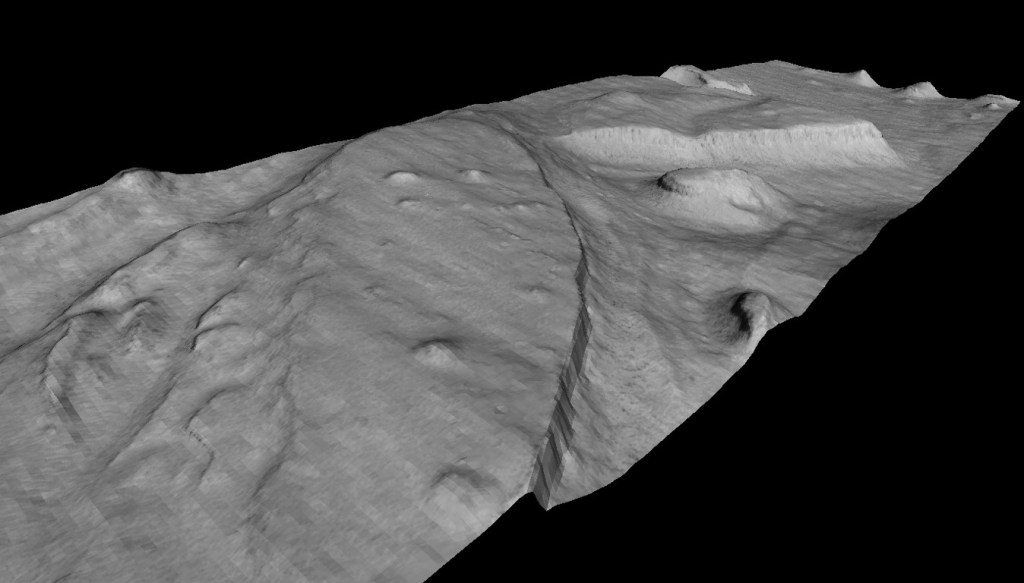
OceanWATERS
The Ocean Worlds Autonomy Testbed for Exploration, Research, and Simulation (OceanWATERS) is an open source simulator for developing onboard autonomy software for the robotic exploration of ocean worlds, such as Jovian moon Europa, and Saturnian moons Enceladus and Titan. The simulator emulates surface conditions, robotic manipulator operations, and lander systems. The simulator is modeled on the Europa Lander Mission, but could be configured for other lander missions and planetary bodies.
Learn More