![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)







About Robonaut
Robonaut 2 Technology Suite Offers Opportunities in Vast Range of Industries
Nearly 50 individual technologies available for licensing
Researchers at NASA’s Johnson Space Center (JSC), in collaboration with General Motors and Oceaneering, have designed a state-of-the-art, highly dexterous, humanoid robot: Robonaut 2 (R2). R2 is made up of multiple component technologies and systems — vision systems, image recognition systems, sensor integrations, tendon hands, control algorithms, and much more. R2’s nearly 50 patented and patent-pending technologies have the potential to be game-changers in multiple industries, including logistics and distribution, medical and industrial robotics, and beyond.
NASA Technology Transfer Program about Robonaut 2 Technology Suite Offers Opportunities in Vast Range of Industries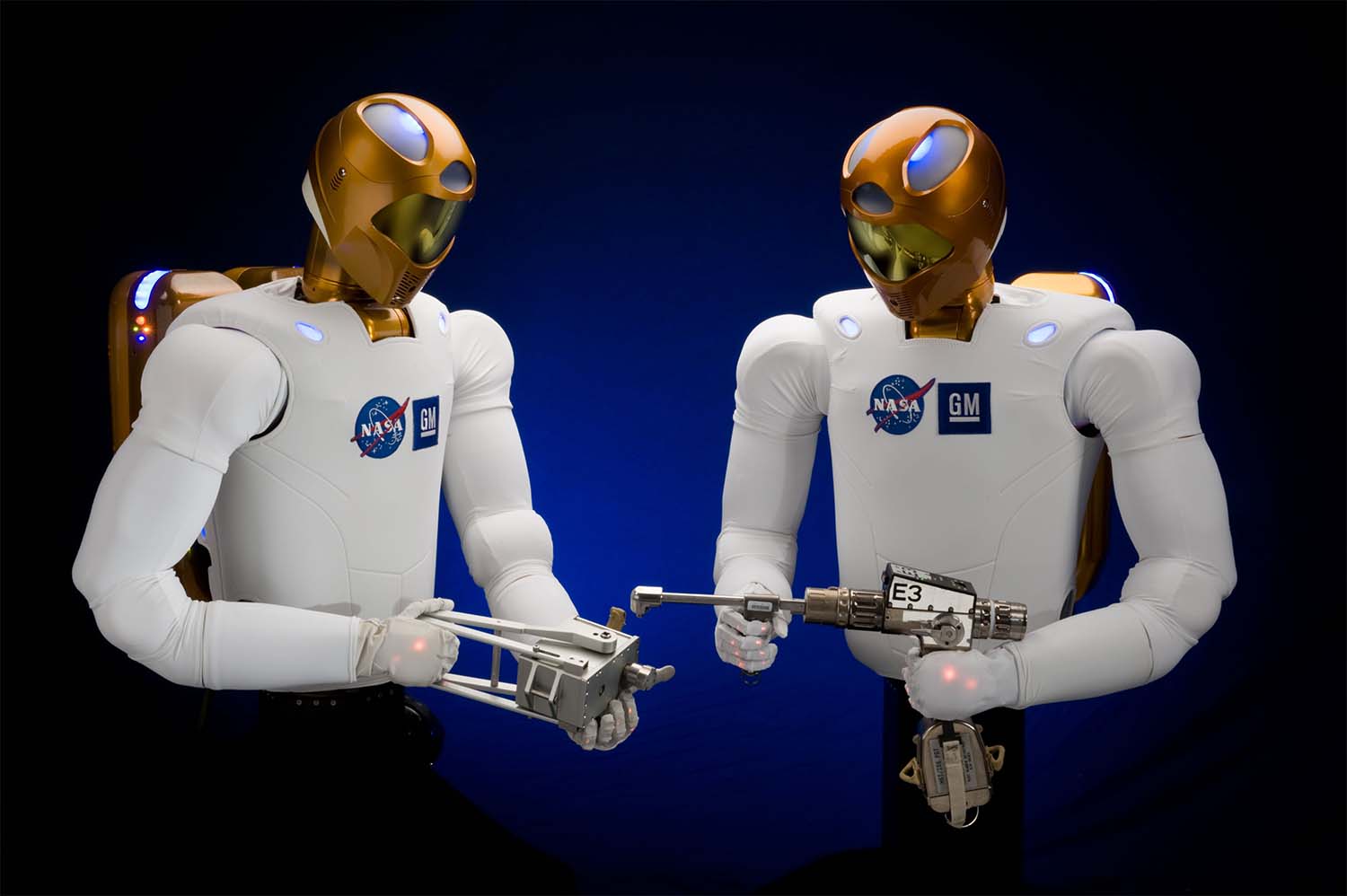
Robonaut 2
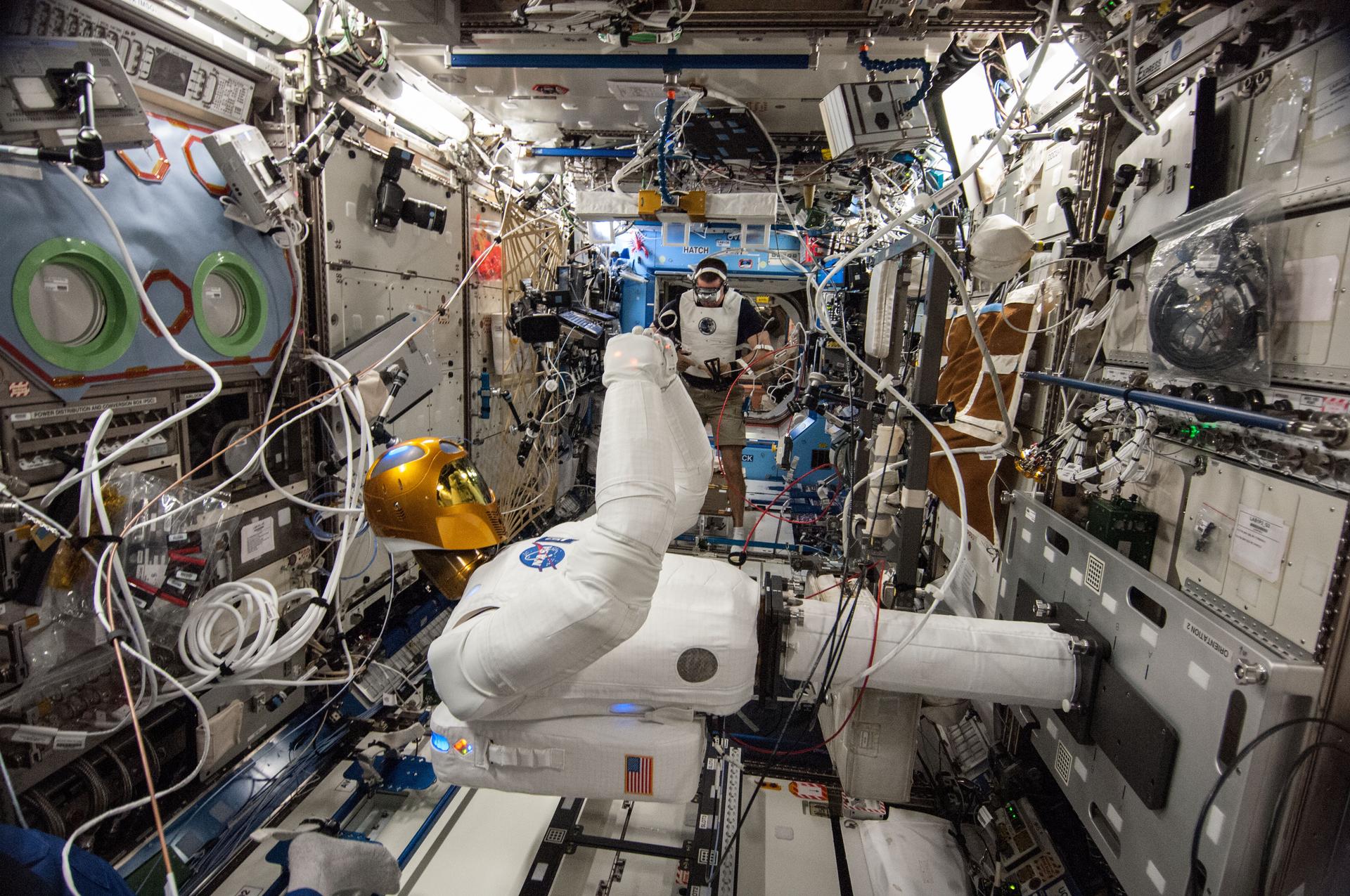
The Robonaut project has been conducting research in robotics technology on board the International Space Station (ISS) since 2011. In 2014, the original upper body humanoid robot was upgraded by the addition of two climbing manipulators (“legs”), more capable processors, and new sensors. While Robonaut 2 (R2) worked through checkout exercises on orbit following the upgrade, technology development on the ground continued to advance. Through the Active Reduced Gravity Offload System (ARGOS), the Robonaut team developed technologies that will enable full operation of the robotic testbed on orbit using similar robots located at the Johnson Space Center. Robonaut 2 returned to JSC in 2018. The goal of this work is to create a fully-featured robotics research platform on board the ISS to increase the technology readiness level of technologies that will aid in future exploration missions.
One advantage of a humanoid design is that Robonaut can take over simple, repetitive, or especially dangerous tasks on places such as the International Space Station. Because R2 is approaching human dexterity, tasks such as changing out an air filter can be performed without modifications to the existing design. Another way this might be beneficial is during a robotic precursor mission. R2 would bring one set of tools for the precursor mission, such as setup and geologic investigation. Not only does this improve efficiency in the types of tools, but also removes the need for specialized robotic connectors. Future missions could then supply a new set of tools and use the existing tools already on location.

Development
R2 was designed and developed by NASA and General Motors with assistance from Oceaneering Space Systems engineers to accelerate development of the next generation of robots and related technologies for use in the automotive and aerospace industries. R2 is a state of the art highly dexterous anthropomorphic robot. Like its predecessor Robonaut 1 (R1), R2 is capable of handling a wide range of EVA tools and interfaces, but R2 is a significant advancement over its predecessor. R2 is capable of speeds more than four times faster than R1, is more compact, is more dexterous, and includes a deeper and wider range of sensing. Advanced technology spans the entire R2 system and includes: optimized overlapping dual arm dexterous workspace, series elastic joint technology, extended finger and thumb travel, miniaturized 6-axis load cells, redundant force sensing, ultra-high speed joint controllers, extreme neck travel, and high resolution camera and IR systems.

The project is led by the Robotics Systems Technology Branch in the Software Robotics and Simulation Division at Johnson Space Center‘s Engineering Directorate.