



















Working together without direct human input, three rovers each the size of a carry-on bag will map the lunar surface in 3D, using cameras and ground-penetrating radar.
NASA is sending a trio of miniature rovers to the Moon to see how well they can cooperate with one another without direct input from mission controllers back on Earth. A teamwork-minded experiment to demonstrate new technology, the CADRE (Cooperative Autonomous Distributed Robotic Exploration) project marks another step the agency is taking toward developing robots that, by operating autonomously, can boost the efficiency of future missions. And, by taking simultaneous measurements from multiple locations, the rovers are meant to show how multirobot missions could potentially enable new science or support astronauts.
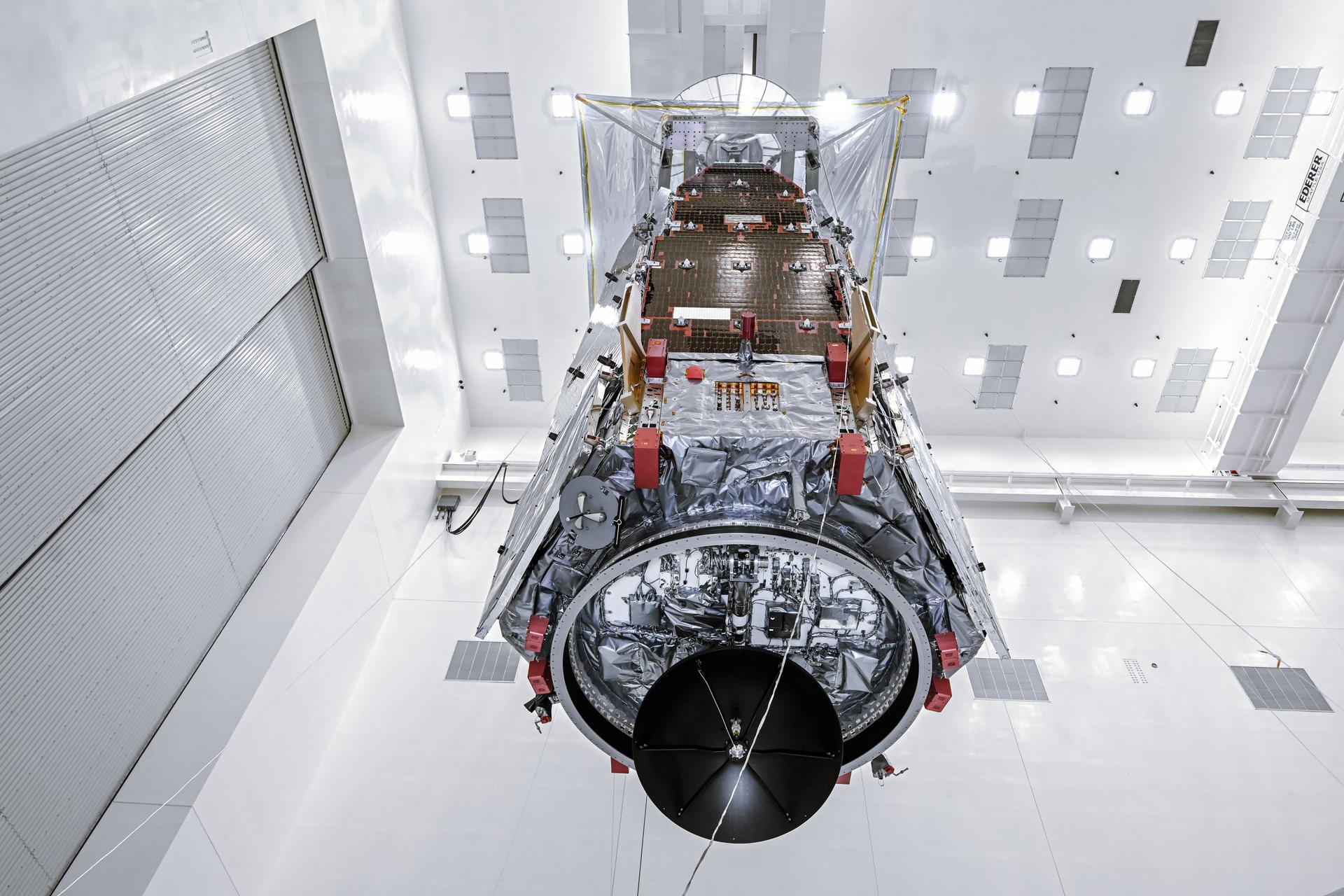
Currently slated to arrive aboard a lander in 2024 as part of NASA’s CLPS (Commercial Lunar Payload Services) initiative, CADRE’s three small rovers will be lowered onto the Reiner Gamma region of the Moon via tethers. Each about the size of a carry-on suitcase, the four-wheeled rovers will drive to find a sunbathing spot, where they’ll open their solar panels and charge up. Then they’ll spend a full lunar day – about 14 Earth days – conducting experiments designed to test their capabilities.

“Our mission is to demonstrate that a network of mobile robots can cooperate to accomplish a task without human intervention – autonomously,” said Subha Comandur, the CADRE project manager at NASA’s Jet Propulsion Laboratory in Southern California. “It could change how we do exploration in the future. The question for future missions will become: ‘How many rovers do we send, and what will they do together?’”
Mission controllers on Earth will send a broad directive to the rovers’ base station aboard the 13-foot-tall (4-meter-tall) lander. Then the team of little robots will elect a “leader,” which in turn will distribute work assignments to accomplish the collective goal. Each rover will figure out how best to safely complete its assigned task.

“The only instruction is, for example, ‘Go explore this region,’ and the rovers figure out everything else: when they’ll do the driving, what path they’ll take, how they’ll maneuver around local hazards,” said JPL’s Jean-Pierre de la Croix, CADRE’s principal investigator. “You only tell them the high-level goal, and they have to determine how to accomplish it.”
Experiments in Teamwork
The rovers will face several tests – all within view of a monitoring camera on the base station atop the lander. The first is to drive in formation and stay on course using ultra-wideband radios to maintain their relative positions while relying on sensors to avoid obstacles. In a second experiment, the rovers will each take a path of their own choosing to explore a designated area of about 4,300 square feet (400 square meters), creating a topographic 3D map with stereo cameras. The project will also assess how well the team would adapt if a rover stopped working for some reason. Success will indicate that multirobot missions are a good choice for exploring hazardous but scientifically rewarding terrain.

And while CADRE isn’t focused on conducting science, the rovers will be packing multistatic ground-penetrating radars. Driving in formation, each rover will receive the reflection of radio signals sent by the others, creating a 3D image of the structure of the subsurface as much as 33 feet (10 meters) below. Together they can gather more complete data than can current state-of-the-art ground-penetrating radars like the one on NASA’s Perseverance Mars rover, RIMFAX (Radar Imager for Mars’ Subsurface Experiment).
“We’ll see how multiple robots working together – doing multiple measurements in different places at the same time – can record data that would be impossible for a single robot to achieve,” Comandur said. “It could be a game-changing way of doing science.”
Working Smart
But there’s more to CADRE than testing autonomy and teamwork capabilities: The rovers also need to survive the harsh thermal environment near the Moon’s equator, which poses a challenge for such small robots. In the searing sunlight, the rovers could face midday temperatures of up to 237 degrees Fahrenheit (114 Celsius). Made with a combination of commercial off-the-shelf parts and custom-built components, the rovers must be robust enough to make it through the daytime heat while being compact and lightweight.
At the same time, they need to have the computing power to run the JPL-developed cooperative autonomy software. It’s a difficult balance: The project’s rovers and base station get their brain power from a small processing chip (the next generation of the cellphone-class processor inside NASA’s Ingenuity Mars Helicopter), but using the processor contributes to the heat.
To prevent the rovers from cooking, the CADRE team came up with a creative solution: 30-minute wake-sleep cycles. Every half-hour, the rovers will shut down, cooling off via radiators and recharging their batteries. When they simultaneously awaken, they’ll share their health status with one another via a mesh radio network (much like a home Wi-Fi network) and once again elect a leader based on which is fittest for the task at hand. Then off they’ll go for another round of lunar exploration.
More About the Project
JPL, a division of Caltech in Pasadena, California, manages CADRE for the Game Changing Development program within NASA’s Space Technology Mission Directorate in Washington. The technology demonstration will launch as a payload on the third lunar lander mission by Intuitive Machines, called IM-3, under the CLPS initiative, which is managed by NASA’s Science Mission Directorate, also in Washington. The agency’s Glenn Research Center in Cleveland and its Ames Research Center in Silicon Valley, California, have both supported the project. Motiv Space Systems designed and built key hardware elements at the company’s Pasadena, California, facility. Clemson University in South Carolina contributed research in support of the project.
For further details about CADRE, go to:
https://www.jpl.nasa.gov/missions/cadre
Media Contact
Melissa Pamer
Jet Propulsion Laboratory, Pasadena, Calif.
626-314-4928
melissa.pamer@jpl.nasa.gov
2023-107