


















![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)






RRM
Phase 2
Is there life for a NASA experiment after it’s proved its namesake task? If you’re built to be modular and upgradable, as NASA’s Robotic Refueling Mission is, then the answer is yes!

The Robotic Refueling Mission Tackles New Frontiers
In 2015, RRM was embarking on a new set of operations that might not be connected with robotic refueling – but have everything to do with extending and enhancing the operational lives of existent and future satellites in orbit.
Building on its team’s experience base, RRM worked through an updated to-do list that includes testing a new inspection tool, practicing intermediary steps leading up to coolent replenishment, testing electrical connections for “plug-and-play” space instruments, and working with decals that could help operations guided by machine vision go more smoothly.
What’s the common thread? Servicing capabilities. These new technologies, tools and techniques could eventually give satellite owners resources to diagnose problems on orbit, fix anomalies, and keep certain spacecraft instruments performing longer in space.
Phase 2 of RRM operations began in May 2015 with Dextre, the Canadian Space Agency’s two-handed robot, transferring new RRM hardware – two task boards and a multi-purpose inspection tool – to the RRM module.
Replenishment Techniques
RRM Task Board 3 is the test scene for the cryo replenishment technique demo.
{kind=link}
Coolant systems are critical to future propulsion and life support systems in space. RRM-2 is demonstrating that with the right set of equipment, a robot can accomplish the tasks leading up to coolant replenishment. After retrofitting valves and creating a pressure-tight seal using hardware on Task Board 3, the RRM and Dextre duo will stop short of actual coolant transfer for this round of tasks.
Why? This transfer is being deferred for a future demonstration, presently in the planning stage. These Phase 2 operations are focusing on the robotic steps leading up to it.
Initial activities to demonstrate this in-orbit capability – cutting wires and removing caps – were completed in March and June 2012 via the original RRM tools and activity boards.
Held by the Dextre robot, VIPIR tested its cameras’ capabilities during May 2015 operations by using its imaging workhorse – the Motorized Zoom Lens – to capture images of satellite parts at various distances on the RRM module. The team also tested the functionality of the VIPIR borescope camera. Collected data will help the team determine what type of camera system and operational techniques would be best suited for different tasks on potential future missions.
Electrical Connections
Satellite servicing can open up possibilities – like being able to swap out “plug and play” instruments on a spacecraft. How do you know if that “plug” made the right connection, though? RRM will test robotic adapters and techniques to mechanically and electrically validate the mate and de-mate capability.
RRM’s Task Board 4 is the scene for a variety of technology demonstrations. Some are related to satellite serving, others are hosted experiments.
{kind=link}
Machine Vision Aids
Visual aids in the form of patterned stickers (“friendly fiducials”) can help robots with machine vision to determine their position and orientation relative to a satellite (or satellite component) in need of repair. This information can be used to aid robot operators when performing servicing tasks as well as certain autonomous operations. During RRM-2 operations, the cameras on the RRM Multifunction Tool and Dextre will image these stickers to gauge their capabilities under various in-orbit lighting conditions.
Solar Cell Experiment
On behalf of a team at Glenn Research Center, RRM is hosting a set of quad-junction solar cells to see how they perform in space. Collected data will help the Glenn team understand the cells’ efficiency at converting sunlight into electrical power, as well as their ability to withstand the rigorous demands of the space environment.
Materials Coating Experiment
On behalf of a team at NASA’s Goddard Space Flight Center, RRM is also hosting a set of thermal coating samples to see how they perform within the space environment. Simulating space conditions on the ground is extremely difficult. The International Space Station offers the ideal location to evaluate space materials before they are used on missions.
Hardware Installation
The RRM-Phase 2 hardware complement consists of:
- Two new task boards: Task Board 3 and Task Board 4
- The Visual Inspection Poseable Invertebrate Robot (VIPIR): an inspection tool that is designed to deliver near and mid-range inspection capabilities.
- The RRM On-orbit Transfer Cage (ROTC): an original device developed to transfer hardware outside of the International Space Station.
The full collection of new RRM components were stowed inside the space station until the Dextre robot robotically transferred them from the Japanese Experiment Module (JEM) airlock using the ROTC, and installed the pieces on the RRM module. This took place April-May, 2015.
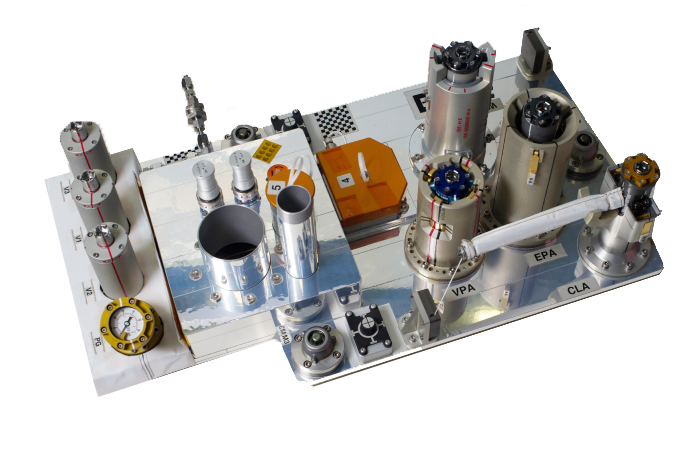
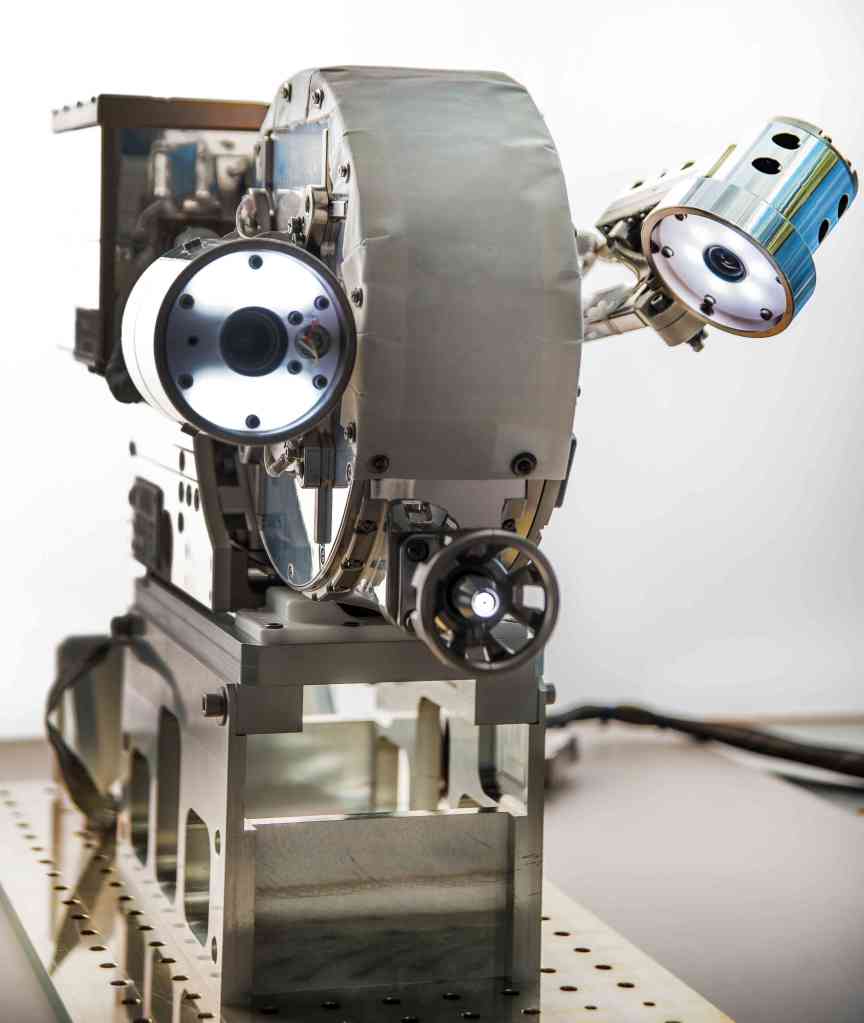
The VIPIR Inspection Tool
VIPIR, the Visual Inspection Poseable Invertebrate Robot, is a robotic, multi-capability inspection tool designed to deliver near and midrange inspection capabilities in space. Designed and built by the team at NASA Goddard Space Flight Center in Greenbelt, Md., VIPIR is being tested during the second phase of Robotic Refueling Mission (RRM) operations on the International Space Station.
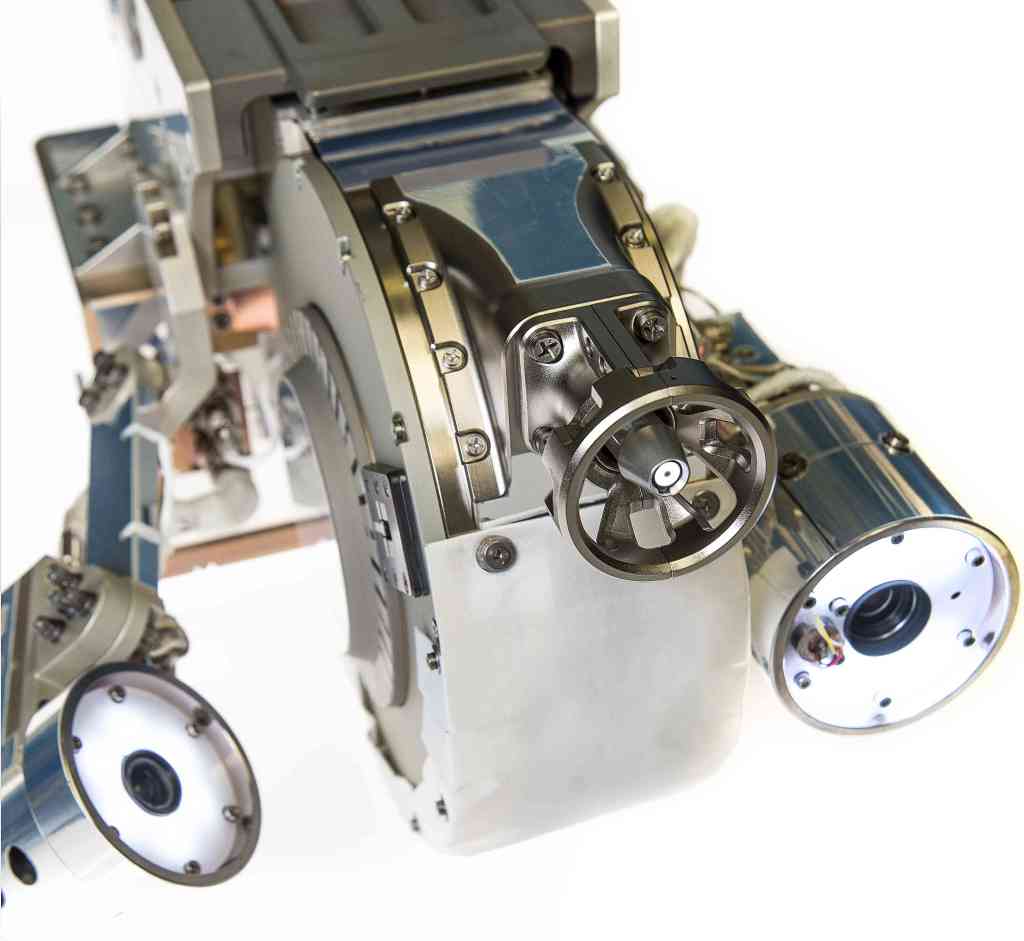
How VIPIR gets where it needs to go: Up to thirty-four inches of flexible tube allow VIPIR to extend and navigate its miniaturized camera through tight openings down to an inch in diameter. Need to take a peek at something above you or around the corner? Mission controllers can command the tip of the tube to rotate up to 90 degrees in four opposing directions.
How it captures data: At the end of the tube’s articulating tip is a tiny color camera that measures a mere 1.2mm in diameter, making it one of the world’s tiniest cameras, and the smallest camera to ever be flown by NASA in space. Developed commercially, it is typically used by the medical industry for endoscopies and other similar procedures. NASA procured this Commercial Off-The-Shelf (COTS) camera and then tested it extensively with custom electronics to screen it for potential failures that might arise in a space environment. Screening commercial hardware for spaceflight allows for rapid development.

Camera capabilities: The borescope camera’s small dimensions do not keep it from delivering an impressive image. It delivers back to Earth a ~100-degree field-of-view image with a 224 x 224 pixel (0.05 megapixel) resolution. While the number of pixels may sound small compared to today’s commercially available digital cameras, which have resolutions on the order of 20 megapixels, this capability is perfect for close-range inspection jobs when the camera is only one to two inches away from its intended target.
llumination: Like any good set of eyes, each of VIPIR’s cameras has an integral light to provide worksite illumination.
Zoom a little closer: For external spacecraft inspection, VIPIR also carries a side camera with a miniature, motorized 8-24mm optical zoom lens the size of a roll of quarters.
This lens’ zoom and focus capabilities are controlled via two spaceflight-quality motors, a mere one-half inch in diameter, that meticulously meet of all NASA’s strict design guidelines – making them the smallest of their kind ever to fly in space. With this capability, mission controllers can zoom in to resolve worksite details as tiny as 0.02 inch – thinner than a credit card.
During a potential future mission, mission controllers could use this midrange inspection capability to perform tasks as diverse as examining a micrometeoroid or orbital debris impact site, or inspecting a solar array that failed to deploy.
Getting its bearings. A third VIPIR camera with a fixed 6mm focal length lens helps human operators on the ground control the tool as they deploy the tube and position VIPIR for operations.
What it’ll be doing on orbit: RRM exists to test new technologies and capabilities in space. Held by Dextre robot, VIPIR tested its cameras’ capabilities in May 2015 by capturing images of satellite parts at various distances on the RRM module. The team also sent the VIPIR borescope camera through a special “decision box” that simulates an inspection activity a robot could perform. On-orbit results are helping the team determine what type of camera system and operational techniques would be best suited for different tasks on potential