


















![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)







RRM
Phase 1
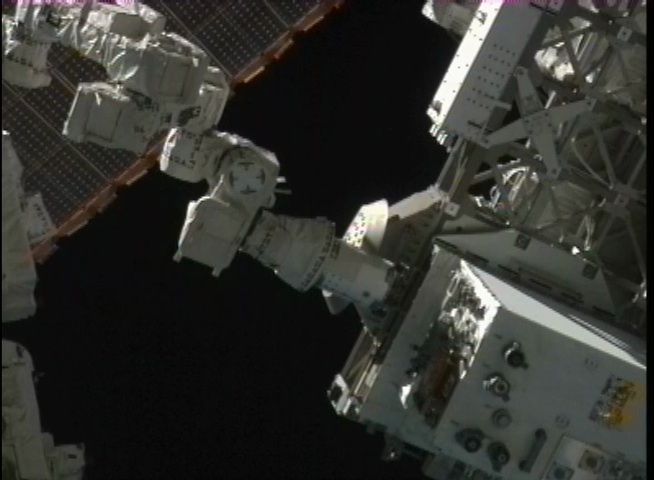
Now that the RRM is securely mounted onto the International Space Station, the operations team is demonstrating robotic servicing and refueling tasks using the RRM module and the Dextre robot.

Mission controllers remotely command the Canadian Dextre robot to use four unique RRM tools to perform a range of servicing tasks on the RRM module. These activities include cutting and manipulating protective blankets and wires, unscrewing caps and accessing valves, transferring fluid, and leaving a new fuel cap in place.
At one stage of the demonstration, Dextre uses the tools to open up a fuel valve similar to those commonly used on satellites today, robotically connect to it, and transfer liquid ethanol through a sophisticated robotic fueling hose. The experiment also demonstrates general space robotic repair and servicing operations.
Each task is performed using the components and activity boards contained within and covering the exterior of the RRM module. This marks the first use of Dextre beyond the planned maintenance of the space station for technology research and development.
{kind=link}
Task Breakdown
- Launch Lock Removal and Vision – The Dextre robot releases the “launch locks” on the four RRM servicing tools. These locks kept the tools secure within the RRM module during the shuttle Atlantis’ flight to the International Space Station. Then Dextre’s cameras image the hardware in both sunlight and darkness, providing data to develop machine vision algorithms that work against harsh on-orbit lighting.
- Gas Fittings Removal – Marking the first use of RRM tools on orbit, Dextre uses the tools to remove the fittings that many spacecraft have for the filling of special coolant gases.
- Refueling – After snipping lock wires and removing caps, Dextre is able to access a fuel valve similar to those commonly used on satellites today and transfer liquid ethanol through a sophisticated robotic fueling hose, completing a first-of-its-kind robotic refueling event.
- SMA (Sub-miniature A) Cap Removal – Dextre removes the coaxial radio frequency (RF) connector caps that terminate and protect the RF connector while the satellite is in orbit. These are known as “SMA (Sub-miniature A) caps.” Access to these connectors would allow a robotic servicer to plug into the data systems of a satellite and better diagnose an internal issue.
- Screw Removal – Dextre will robotically unscrew satellite bolts (fasteners). RRM draws from its experience with the Hubble Space Telescope servicing mission in its use of a small cage to guide the tool tip and ensure that no fasteners float away.
- Thermal Blanket Manipulation – Dextre slices off thermal blanket tape and folds back a thermal blanket to access the contents underneath.
RRM Tools
The RRM tools perform servicing and refueling tasks in the harsh environment of space—robotically by remote control.
How They Got To Space
Safely nested in four storage bays in the RRM module. RRM launched to the International Space Station on STS-135, the last shuttle flight.
Average Weight and Size
The volume of a toaster, weighing around 17 pounds (7.5 kg).
Efficiency by Engineering
The more a single tool can multitask, the fewer heavy tools need to be carried to space. Fewer tools also mean more room to carry other cargo and less cost for mission operators. Each robotic tool was therefore manufactured for maximum efficiency and functionality in space.
Innovation at Work
Innovation springs best from a challenge and a strong foundation. The RRM team had to work within four unchangeable constraints: an 18-month deadline, the static design of the Dextre robot (already in orbit), tough astronaut proximity safety requirements, and finally the fixed design of the satellite pieces with which the tools work.
The team met these challenges by heavily leveraging the twenty years of experience they gained building astronaut tools for the five Hubble Servicing Missions. In-depth understanding of servicing complexities and innovative thinking helped to transfer this knowledge into the four robotic RRM tools.
Rigorous environmental testing in the Goddard Satellite Servicing Center verified RRM tool design, functionality and safety.
Smart Tools for Complex Tasks
RRM tool designers followed the same mantra that defined the work they did for Hubble Space Telescope Servicing Missions: put the “smarts” in the tools. Dextre will use the RRM tools to demonstrate six unique servicing tasks over two years of operation.
“Smart” tools are functional, useable and precise. They are designed to preclude potential missteps from becoming mistakes.
The tools work seamlessly between the end of the International Space Station Dextre robot and the multiple pieces of satellite hardware that the tools cut, manipulate, retrieve, and unscrew. All of the tools have two integral cameras with built-in LEDs—features that give mission controllers a set of eyes and a flashlight as they direct RRM activities. Visual cues on the tools’ exteriors give controllers another way to keep track of a tool’s position. All RRM tools also have built-in fault tolerance to help ensure mission success.
Wire Cutter & Blanket Manipulation Tool
The Wire Cutter Tool’s precision and fine-grabbing capabilities allow it to both snip tiny wires and safely move aside delicate thermal blankets. A spade bit on the tool’s tip can slice blanket tape. Its parallel jaw grippers are able to grab a satellite’s appendages.
The Wire Cutter Tool has a functionality of four: it grabs, it snips, it manipulates, and it slices.

Multifunction Tool
The Multifunction Tool lives up to its name by effectively doing the work of four tools. It connects with four unique adapters to capture and remove three distinct caps and remove one gas “plug” on the RRM module.
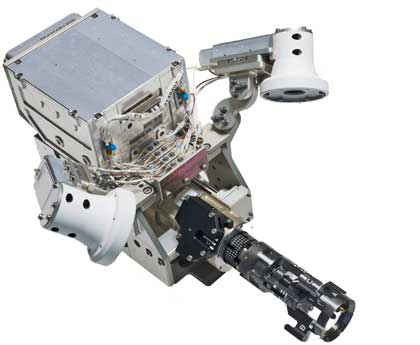
Safety Cap Tool
The Safety Cap Tool removes and stows a typical fuel-valve safety cap and its seal. Small adapters allow it to also manipulate screws and remove caps on the RRM module.
The RRM Safety Cap Tool is shown at a variety of angles. Each RRM tool’s lobster-like appearance comes from the two integral cameras with built-in LEDs, which image and illuminate the tool’s work during mission operations.

Nozzle Tool
The Nozzle Tool connects to, opens and ultimately closes a satellite fuel valve. Using an attached hose, it transfers a representative satellite fuel in a continuous loop to simulate the refueling of a satellite. The Nozzle Tool has an anti-cross-threading feature that ensures it cannot damage the satellite fuel valve by screwing the fuel cap on the wrong way. The fuel cap that the tool leaves behind has a “quick disconnect” fitting that gives operators easy future access to the valve, should it be needed.
