
















![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/missions/a-step/FFR_Earth_Background_20251120%20.png?w=1024)











How does an Artemis rover prepare to drive off its lander and roll onto the rocky surface of the Moon? With a test drive on Earth, of course.
NASA’s Volatiles Investigating Polar Exploration Rover, or VIPER, is the agency’s first lunar mobile robot. This marks the second round of VIPER rover egress testing at Johnson Space Center in Houston, building on lessons learned from the first test.
Egress refers to the process of the rover exiting the lander after being carried from Earth to the Moon and driving onto the lunar surface itself. This is similar to a car being driven off a cross-country car hauler, except after an interplanetary journey.
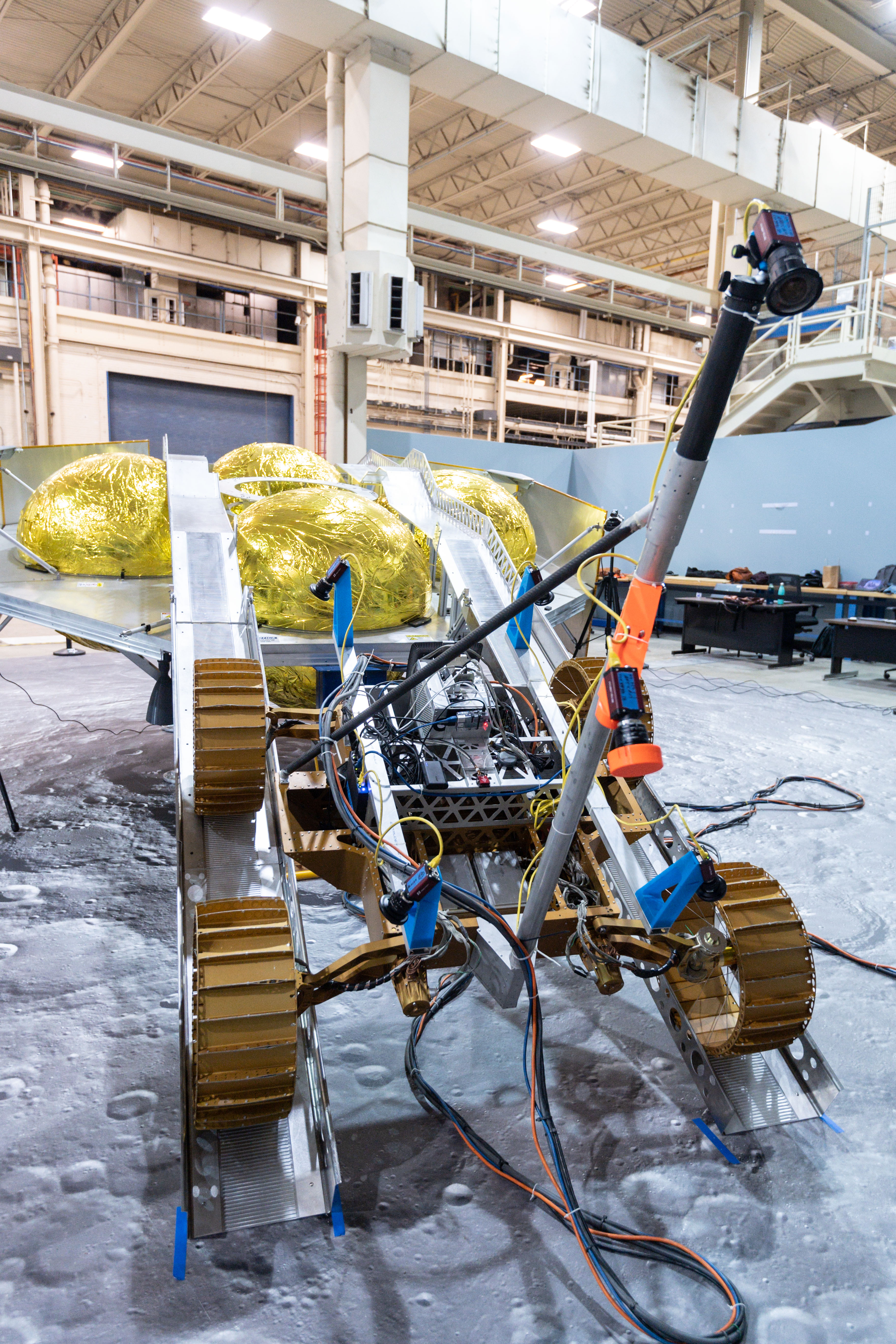
The egress test used the latest hardware and software in development for the VIPER mission, as well as updated ramps on the Griffin lander with new aluminum surface features. A prototype of the rover was driven down the ramps using the latest versions of the driving tools and software.
The testing was conducted with the lander positioned at tilted angles, simulating the lander touching down on a slope. This allowed the VIPER team to test the most extreme exit scenarios off the lander.
The VIPER mission is managed out of NASA’s Ames Research Center in California’s Silicon Valley, and is scheduled to be delivered to the Moon in late 2023 by Astrobotic’s Griffin lander as part of the Commercial Lunar Payload Services initiative. Construction of the rover will begin in late 2022 at NASA’s Johnson Space Center in Houston, while the rover flight software and navigation system design will take place at Ames. Astrobotic will receive the complete rover with its scientific instruments in mid-2023 in preparation for launch later that year.
For news media:
Members of the news media interested in covering this topic should reach out to the NASA Ames newsroom.