



![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)








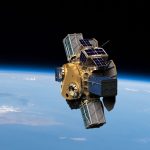
The NASA TechLeap Prize’s Nighttime Precision Landing Challenge is advancing the affordability and reducing the complexity of precision landing capabilities to deliver spacecraft to safe landing locations, particularly when the terrain is hazardous and lighting conditions are challenging. Flight testing of the technologies developed by the three winners took place over a lunar surface proving ground. (Video above provided by Astrobotic.)
Flight Provider
Astrobotic
Flight Test Platform
Rocket-powered lander
Flight Dates
Aug. 10, Sept. 5, and Oct. 5, 2024
Location
Lunar Surface Proving Ground, Mojave, California
About the Challenge | Winners’ Payloads | About the Flight Test Location | Watch Tethered Night Flight
News | Prior and Ongoing Challenges
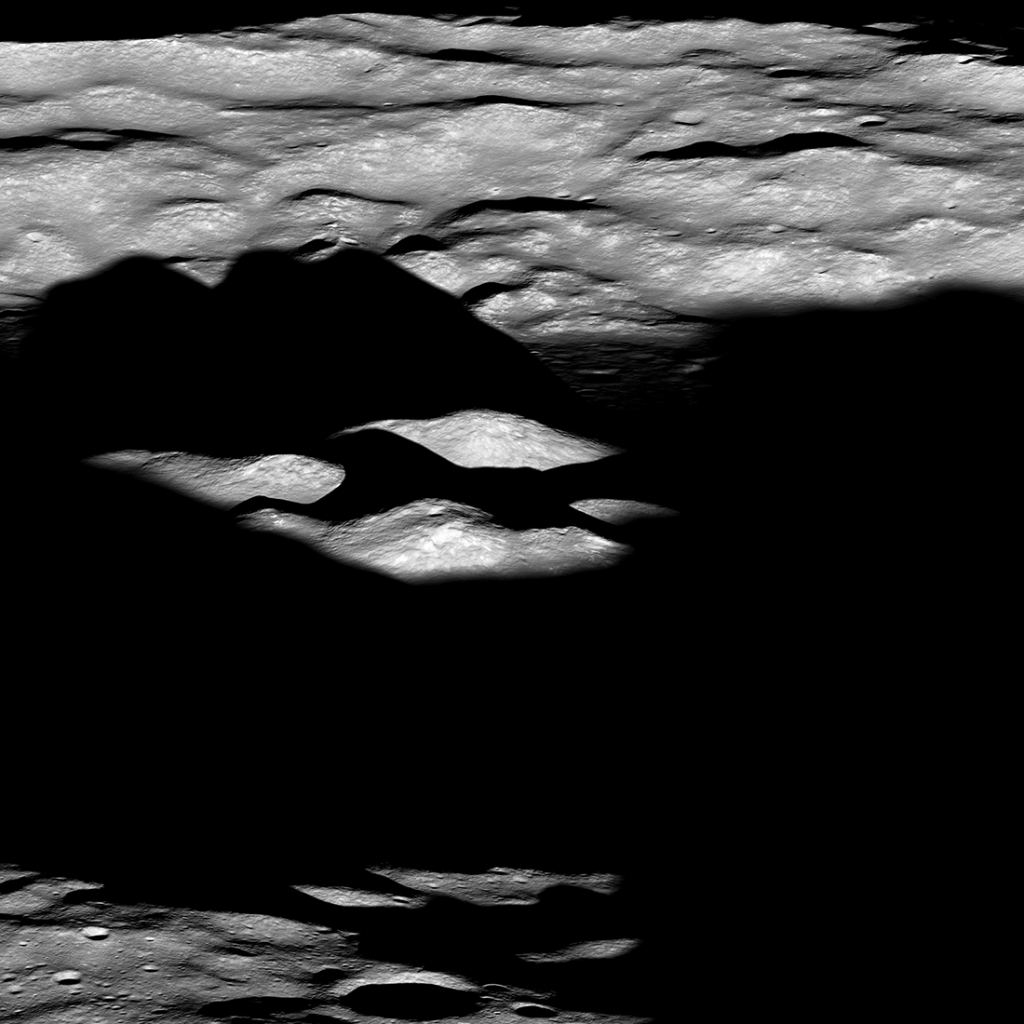
Detecting Hazards in the Dark
NASA and others plan to send small landers to scientifically interesting places on the Moon and beyond. Yet, many of the most scientifically interesting places also present some of the most challenging and hazardous terrains to land safely. Precision landing capabilities to deliver spacecraft to safe landing locations in close proximity of targeted exploration sites is a high priority for human and robotic missions to the Moon, Mars, and elsewhere in the solar system. While significant efforts have gone into the development of precise navigation capabilities, challenges remain with the identification of safe landing sites, especially hazard-free landing sites within shadowed and dark surface regions while using smaller and less expensive hazard detection systems.
The winners of Nighttime Precision Landing Challenge seek to test less expensive, smaller, and lower mass systems for detecting hazards from an altitude of 250 meters or higher to generate terrain maps suitable for facilitating safe landings in the dark.
More information is available on the NASA TechLeap website for this challenge. Carrot is the challenge administrator for TechLeap.
The Winners’ Payloads
A-LiST | LITTLE OWL | MoonFALL
A-LiST
Designed at the University of South Florida to reduce the size, mass, and cost of precision terrain mapping technology, the A-LiST (Automated Lidar Scanning Topography) sensor combines multiple commercially available light detection and ranging (lidar) sensor heads to collect point data across multiple perspectives simultaneously. By utilizing simultaneous localization and mapping algorithms, A-LiST will synthesize the data from the lidar to form a complete topographical map. A-LiST was flight tested at approximately 1:00 a.m. PDT on August 10, 2024. Researchers will use data from the flight test to analyze A-LiST’s performance.
Learn more about A-LiST
LITTLE OWL
Developed by Falcon ExoDynamics, LITTLE OWL (Low SWAP-C Nighttime Landing Hazard Detection System) integrated sensing system is comprised of a high-resolution visible spectrum camera, high-lumen LED floodlight, small gimbal, and GPU-based processor to perform sensing of terrain in the dark from an altitude of 400 meters and higher to help identify hazards and safe landing sites for spacecraft. The flight test for LITTLE OWL occurred around 10:00 p.m. PDT on September 5, 2024.
Learn more about LITTLE OWL
MoonFALL
Developed by Cal Poly Pomona's Bronco Space Club, the MoonFALL (Moon Fast and Accurate Lidar Localization) technology leverages a light projector to project a grid of reflective points visible to a camera, creating an initial geometry map. The system uses a combination of structured light and lidar (light detection and ranging) – along with advances in computer vision, machine learning, robotics, and computing – to generate a map that reconstructs lunar terrain. MoonFALL was flight tested on Oct. 5, 2024, at 9:15 p.m. PDT — nearly three hours after sunset.
Learn more about MoonFALLAbout the Flight Test Location
Lunar Surface Proving Ground
Built in preparation for flights tests conducted as part of the TechLeap Nighttime Precision Landing Challenge, Astrobotic's nearly 100-meter-by-100-meter 3D test field provides a realistic lunar topography for spacecraft and rover sensors and systems. It also offers a facility for simulating the extreme lighting conditions encountered at the lunar poles. The company built the lunar surface analogue test site for a variety of test campaigns, from precise lunar landing technologies to lunar rovers and other robotic systems.
Learn more about the test fieldWatch a Tethered Night Flight
Nighttime Precision Landing Challenge News


Prior and Ongoing TechLeap Challenges

Space Technology Payload Challenge

Universal Payload Interface Challenge