



![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)








Safe and Precise Landing-Integrated Capabilities Evolution
SPLICE is a Descent and Landing system integrating multiple component technologies including avionics, sensors, and algorithms. Its technologies provide safe and precise landing for the Moon, Mars, Icy Worlds, and other destinations using specialized navigation, guidance, and processing techniques. It enables landing in hard to reach and unknown areas that are of high scientific interest.
Lead Center
Johnson Space Center
Introduced
October 2017
PRINCIPAL TECHNOLOGIST
Michelle Munk
Project Manager
Gavin Mendeck
SPLICE
A new suite of lunar landing technologies, called Safe and Precise Landing – Integrated Capabilities Evolution (SPLICE), will enable safer and more accurate lunar landings than ever before. Future Moon missions could use NASA’s advanced SPLICE algorithms and sensors to target landing sites that weren’t possible during the Apollo missions, such as regions with hazardous boulders and nearby shadowed craters. SPLICE technologies could also help land humans on Mars.
Learn MoreWhat is SPLICE?
NASA is developing advanced precision landing technologies for robotic science and human exploration missions to the Moon, Mars, icy bodies, and other terrestrial destinations.
A new suite of lunar landing technologies, called Safe and Precise Landing – Integrated Capabilities Evolution (SPLICE), will enable safer and more accurate lunar landings than ever before. Future Moon missions could use SPLICE’s advanced algorithms and sensors to target landing sites that weren’t possible during the Apollo missions, such as regions with hazardous boulders and nearby shadowed craters. SPLICE technologies could also help land humans on Mars.
SPLICE consists of the following technologies and capabilities:
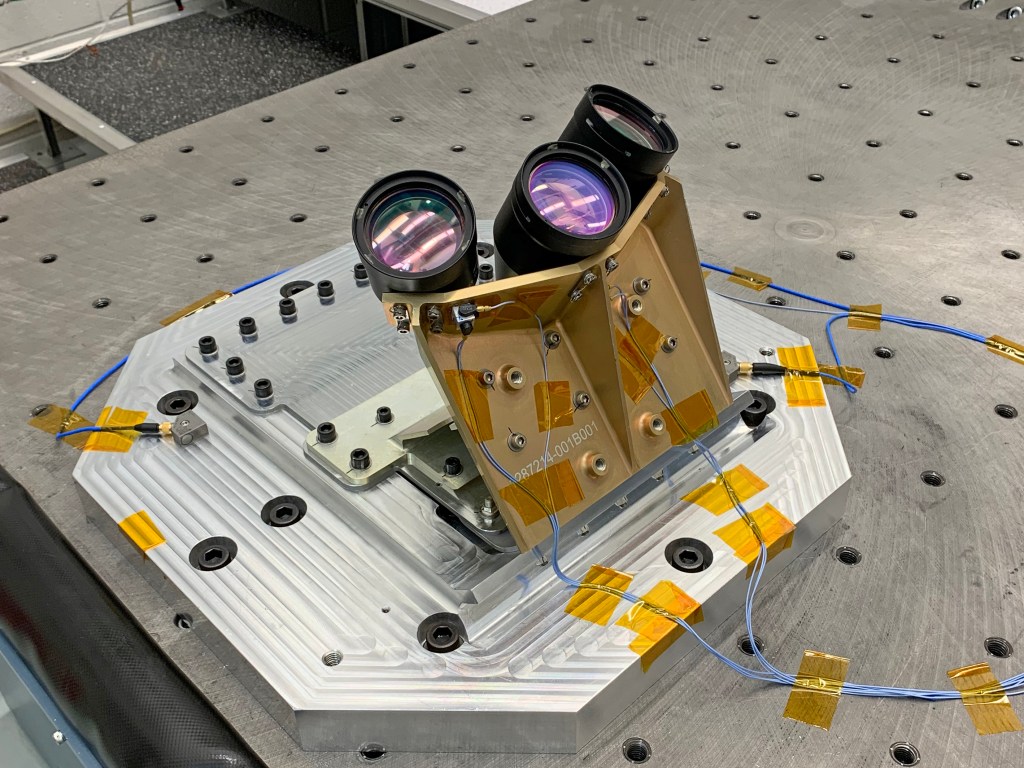
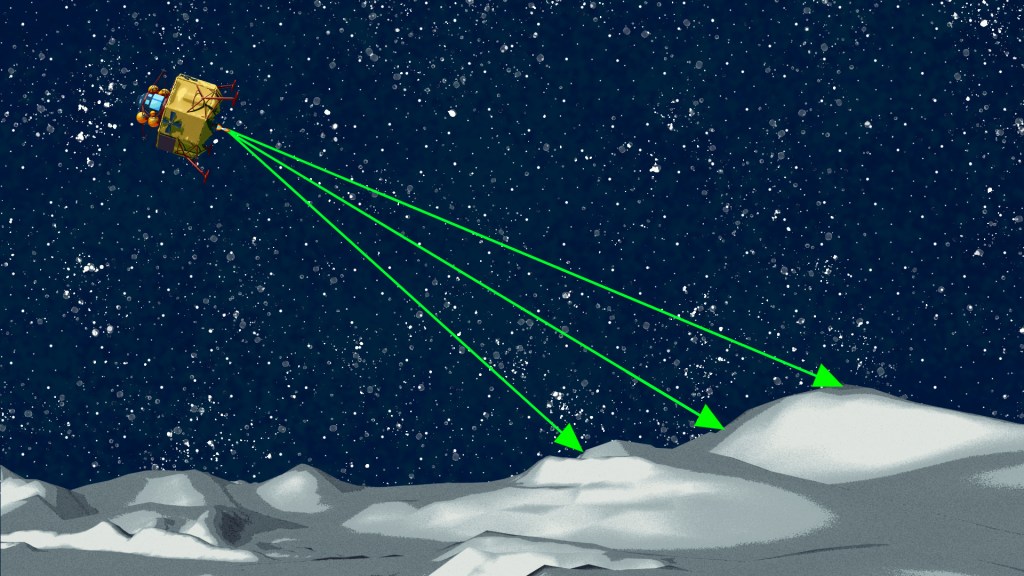
- Navigation Doppler Lidar (NDL): This unit has a small electronics box and laser connected by fiber optic cables to three telescopes mounted at fixed angles optimized for performance. During a landing, NDL sends laser beams to the surface, and the reflected returns are detected to provide an estimate of the lander’s velocity and altitude.
- Terrain Relative Navigation (TRN): This system includes a camera that takes live pictures and compares them to existing orbital images of the surface to determine the spacecraft’s location.
- Hazard Detection Lidar (HDL): The sensor is a laser-based 3D imaging system that scans a surface to create a 3D map of the landing field. The HDL images surface terrain that could be a hazard for landings, such as steep slopes or large rocks.
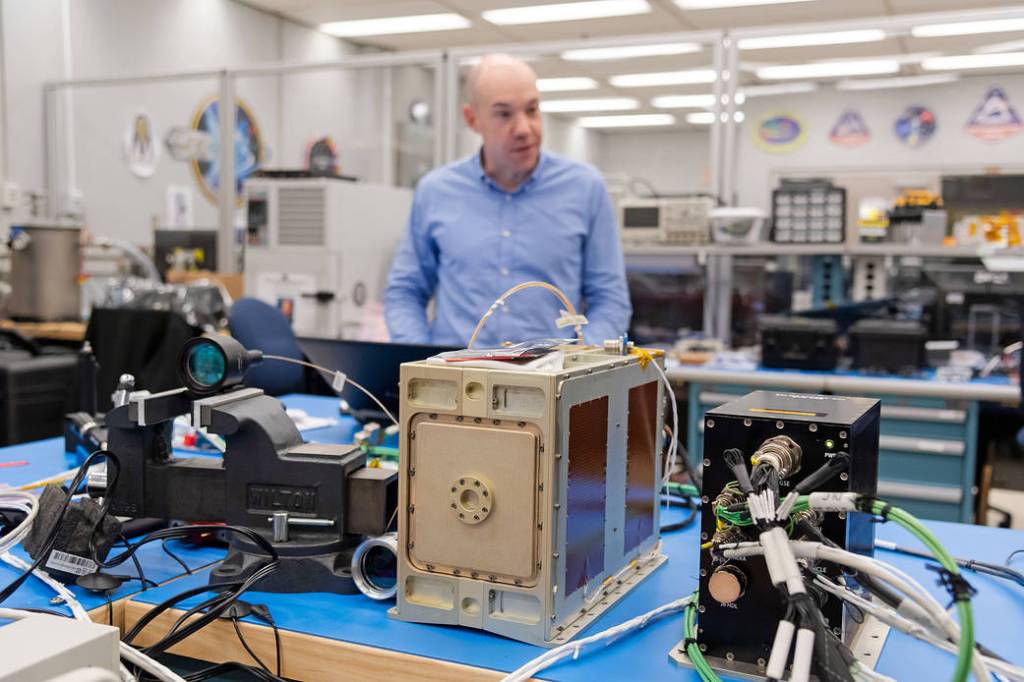
- Descent and Landing Computer (DLC): This is a high-performance multicore computer processor unit that analyzes all SPLICE sensor data and determines the spacecraft’s velocity, altitude, and terrain hazards. It also computes the hazards and determines a safe landing location.
How would SPLICE technologies work together during a lunar landing?
As a spacecraft begins to lower from orbit, it ignites its engine and begins a powered descent towards the surface. During the entire descent, the SPLICE DLC aboard the spacecraft autonomously operates the SPLICE sensor suite and processes algorithms for navigation, guidance, and hazard detection to enable a precise and safe landing. The “brain” of the DLC is a commercial multicore processor. In the coming years, the DLC processor chip will be replaced with a more advanced processor currently in development by NASA, called the High-Performance Space Computing (HPSC) processor.
As the spacecraft approaches the Moon, SPLICE’s TRN component uses a camera to take photos of the surface. It compares them to preloaded maps generated from images previously captured by satellites orbiting the Moon. By detecting and tracking the features in these live photos, the DLC knows where the spacecraft is relative to the features on the map. This enables the spacecraft to avoid known geographic features, such as hills and craters. At the same time, TRN allows a spacecraft to land near areas of scientific interest instead of landing far away and driving a rover to a targeted location.
When a lander is about 4 miles (6.4 kilometers) above the surface, the NDL activates. The instrument transmits laser beams to the Moon’s surface. Those beams bounce off the surface and back to the instrument. This feedback allows NDL to detect the lander’s velocity and altitude as it approaches the lunar surface, which increases the precision of the navigation and guidance algorithms running on the DLC. NASA has previously relied on radar sensors for landing vehicles on the Moon and other planets. The NDL provides measurements that are significantly more precise than radar-based sensors in a smaller package, has less mass, and requires less power.
During the final portion of the descent, the lander rotates to a vertical position to prepare a soft touchdown. When the lander is about 1,640 feet (500 meters) from the surface, the HDL system images the surface and generates a 3D terrain map of the landing site. The HDL uses a laser-based 3D imaging system that scans the landscape in real-time and stitches together the terrain model from millions of laser pulses and their return. The DLC processes this 3D map to identify landing hazards, such as rocks and slopes, and determine the safest landing sites for a touchdown within an approximately 330-foot (100-meter) diameter circular space.
This upgraded suite of landing technologies can be used to explore new solar system destinations, providing access to surface regions of scientific interest that missions cannot reach with current landing capabilities. The NDL system will fly on two commercial lunar landers targeted for flights in 2021. Additionally, SPLICE technologies will be considered for use to land the first woman and the next man on the Moon under NASA’s Artemis program as well as for future Mars sample return missions.


Fast Facts
- For the Apollo landings, astronauts were trained to identify particular lunar surface locations to help them navigate during a landing. Astronauts would have to identify landmarks they saw outside the window to help them understand where they were. The SPLICE’s TRN function will perform this task by running real-time images against preloaded lunar surface maps, so astronauts don’t have to rely on their ability to recall many different surface reference points.
- The SPLICE technology suite could also help land humans on Mars as early as the 2030s.
- The SPLICE technologies have been tested extensively on the ground and aboard suborbital rockets over the past decade. They were matured through multiple prior NASA projects, including the former Autonomous precision Landing and Hazard Avoidance Technology (ALHAT) project.
Milestones
- Precursors to the SPLICE sensors, developed under the ALHAT project, underwent suborbital testing aboard a NASA Project Morpheus rocket in 2014.
- NASA’s Flight Opportunities program coordinated additional flight testing of the precursor SPLICE NDL instrument aboard Masten Space Systems’ Xodiac suborbital rocket in 2017.
- In June 2019, high-speed rocket sled tests of NDL in Kern County, California, obtained data at almost 480 miles per hour (250 meters per second), successfully demonstrating NDL’s ability to provide accurate high-velocity measurements.
- The project tested the TRN system, developed by Draper, in September 2019 on a launch and landing of Masten’s Xodiac rocket. NASA’s Flight Opportunities program also supported this test.
Partners
- NASA’s Johnson Space Center in Houston provides project leadership and is developing the DLC, a ground-based hardware-in-the-loop simulation testbed, and the guidance and navigation software.
- NASA’s Langley Research Center in Hampton, Virginia, is developing the NDL and performing mission architecture studies and developing trajectory simulations.
- NASA’s Goddard Space Flight Center in Greenbelt, Maryland, is developing, building and maturing the HDL, providing a flight software system and fiber optics, and developing an HPSC single board computer.
- NASA’s Jet Propulsion Laboratory is providing hazard detection algorithms, developing high-definition hazard detection and TRN models for concept of operations studies, and leading with the HPSC processor development.
- Draper of Cambridge, Massachusetts, is providing and adapting the TRN algorithm, developing navigation software, and implementing guidance algorithms.
- The SPLICE project is funded by NASA’s Game Changing Development program within the Space Technology Mission Directorate.
Learn more:
Coming in for a Landing with New NASA Technology
One Giant Leap for Lunar Landing Navigation
Langley Researchers Are Shaking Up Lunar Landing Technology
For news media:
Members of the news media interested in covering this topic should reach out to the NASA Johnson or Langley newsrooms.