



















Marco Pavone
Stanford University
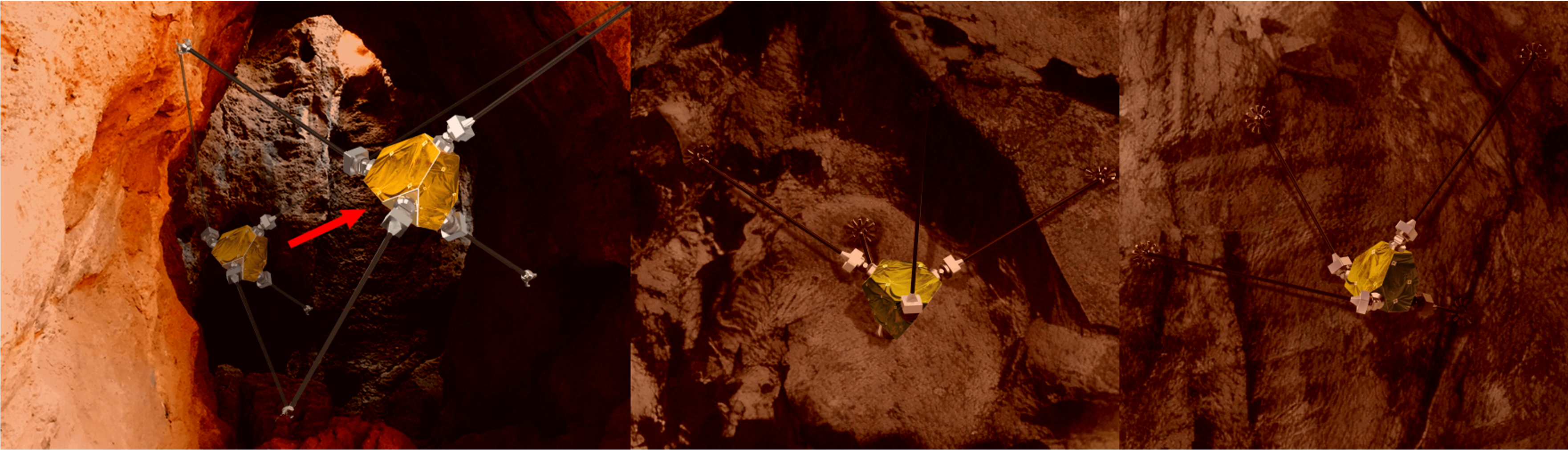
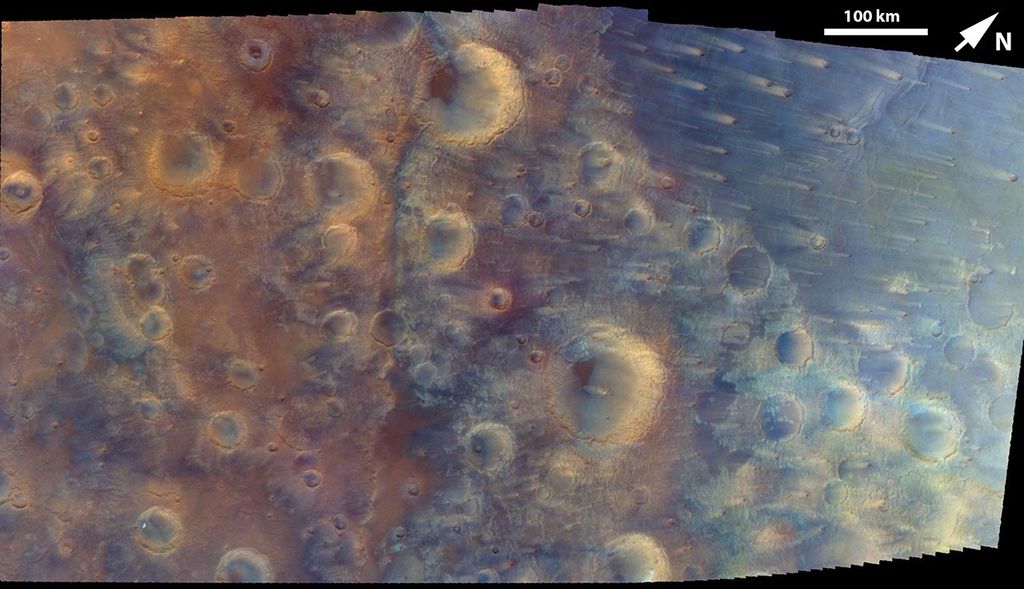
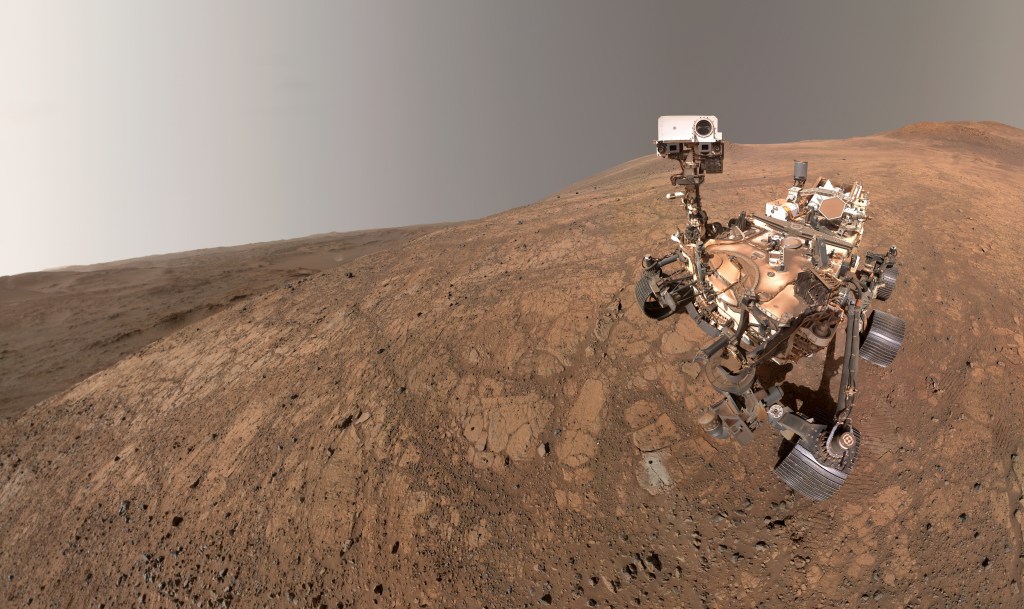
The objective of this effort is to develop a mission architecture where a long-reach crawling and anchoring robot, which repurposes extendable booms for mobile manipulation, is deployed to explore and sample difficult terrains on planetary bodies, with a key focus on Mars exploration. To this end, the robot concept we present here, called ReachBot, uses rollable extendable booms as manipulator arms and as highly reconfigurable structural members. ReachBot is capable of 1) rapid and versatile crawling through sequences of long-distance grasps, 2) traversing a large workspace while anchored (by adjusting boom lengths and orientations), and 3) applying high interaction forces and torques, leveraging boom tensile strength and the variety of anchors within reach. These features allow a light and compact robot to achieve versatile mobility and forceful interaction in traditionally difficult environments, like vertical cliff walls or the rocky and uneven floors of caves on Mars. In particular, ReachBot is uniquely suited for exploring and sampling Noachian targets on Mars that contain ancient material preserved in strata in the form of cliff-face fractures and sublimation pits, key sources of historical and astrobiological information.
In this NIAC Phase I effort, we will investigate four key feasibility challenges: (1) expanding the reachable kinematic and wrench workspace (i.e., where and what forces/moments the robot can apply) through mechanical design trade-offs, (2) providing robust control and motion planning, (3) developing reliable surface grasping solutions, and (4) developing feasible mission architectures for exploration and sampling of Martian caves. For testing, we will build a planar prototype with several arms on the free-flyer robotic testbed at the Stanford Space Robotics Facility. If successful, this project will transition into an effort focused on building a full-scale robot to test the system in real-world environments.
This study brings together an interdisciplinary team of experts in robot autonomy, robotic manipulation, mechanical design, bioinspired grasping, and geological planetary science from Stanford.



