




















Transcript
(music)
NASA Launch Control:T-minus 15 seconds…
Narrator: When a Mars rover is on top of a rocket, ready to leave Earth, it is not simply a rover. Nestled within a space capsule, its computer mind is focused on interplanetary flight, not on driving. In this moment, the rover is an “astronaut” aiming for the Red Planet.
NASA Launch Control: T-minus ten, nine, eight, seven, six, five, four, three, two, one, main engine start, zero, and lift-off!
Narrator: The rocket ignites and climbs high into the sky, and when its fuel is spent, the rocket falls back down into Earth’s gravity well. Meanwhile, the capsule it had pushed into space continues zooming away from our planet and toward Mars, steered by smaller rockets called thrusters.
[0:55]The space capsule is somewhat like an oyster, with a backshell and a heat shield making up the top and bottom, and the rover concealed like a pearl inside. When it reaches the Mars atmosphere, the capsule turns so the heat shield fully faces its destination.
Al Chen is a JPL engineer who honed the entry, descent and landing procedure – or EDL – for NASA’s Curiosity and Perseverance Mars rovers.
Al Chen:If you were trying to reduce all of entry, descent and landing to one idea, it is: find a way to stop.
(sound effect: space capsule whoosh)
Narrator: The rover’s capsule has built up a lot of speed after its launch off Earth and many-months journey through outer space.
Al Chen: We’re coming in really fast. We’re coming in at 12,000 or 13,000 miles an hour. And we’ve got to find a way to get ourselves down to 2 miles an hour or so by the time we touch down, trying to bleed off all that velocity, all that energy.
(sound effect: atmospheric entry)
[1:58]Al Chen: As we’re going through the top of the atmosphere, the frictional heating of the atmosphere is slowing us down. Slowing that capsule down heats up the front of the vehicle, and of course, it heats up the atmosphere. And that’s where a lot of that velocity is going, 99% of it, we’re dumping off as heat into the atmosphere or onto the heat shield itself.
And during that period, we’re not only trying to survive, but with Curiosity and Perseverance, we are also trying to steer the vehicle to go where we want to go. And that means firing thrusters on the spacecraft to try to point where it’s going.
(sound effect: firing capsule thrusters)
Al Chen: Both Curiosity and Perseverance had a little bit of lift. You can think about it as a kind of really poor airplane. We’re pulling that lift in different directions to allow us to control how far the vehicle is going to fly downrange. So that’s what we call entry guidance.
But that’s all just the hypersonic part of the flight, where we’ve been heating up and slowing down from 12, 13,000 miles an hour to down around 1,000 miles an hour. And at that point the atmosphere pretty much has done all it can for us, and in fact, if you don’t do anything else, if you just let the capsule keep going, the atmosphere will not slow you down any slower than about Mach one and a half. So we deploy this parachute to help slow us down even further, take us down from 1,000 miles an hour to eventually get us subsonic – to below the speed of sound – down to around 150, 160 miles an hour.
[03:13](sound effect: parachute opens)
Al Chen: So that parachute gives us a big kick in the… you know, really slows us down. (laughs)We’re subsonic within a few seconds, actually. And at that point, we finally get to get rid of the heat shield. Now we’re going slow enough that there’s really no atmospheric heating anymore, so you can pop off that heat shield and finally take a look at the ground.
(sound effect: popping off heat shield)
Narrator: The heat shield had been like a blindfold, preventing the rover from using its radar to get its bearings above Mars.
Al Chen: So the radar really just tells us how fast we’re going and how high we are. With Perseverance, we added the capability to actually look at the ground with cameras, and take pictures of the ground rushing up at us. And that way, we can make adjustments to where we want to go.
[3:59] But still, we’re descending on the parachute during this period, going, you know, 160-ish miles an hour, even when the parachute is done slowing us down. So, again, if we did nothing else, the spacecraft would hit the ground at about 160 miles an hour, which is not a survivable case. So when we get down to about a mile and a half above the surface, that’s when we need to light up rocket engines and get rid of that parachute.
Narrator: NASA’s Sojourner, Spirit, and Opportunity rovers were encased in airbags as they hung from their parachute, and then when the parachute was discarded, they dropped to the surface and bounced across Mars like giant beach balls. Curiosity and Perseverance were too heavy for airbags, so they used jet packs instead. The jet pack didn’t take the rover all the way down, but hovered above the surface and lowered the rover by ropes in a maneuver called the “sky crane.” Once the rover’s wheels hit Martian dirt, the ropes were cut and the jet pack flew off into the distance so its rockets couldn’t damage the rover.
(sound effect: sky crane and jet pack)
[5:03] Narrator: Entry, descent and landing on Mars happens so fast, the rover has to pilot itself.
Al Chen:Depending on what kind of landing system you are, you have six or seven minutes from the top of the atmosphere to the ground. There’s very little time for us to think or for the spacecraft to think about what needs to be done.
The one-way light time – the time it takes for signals to get from Mars to Earth – varies. It’s been around, for a lot of our landings, 10 to 15 minutes or so. So that’s just the time it gets to figure out what the spacecraft is telling us. It would take double that time to send back commands to it. So imagine trying to drive a remote-control car with a 20-minute round-trip delay between what you see and what you’re trying to drive. It’s just not tenable, right?
So the spacecraft has to fly it all the way down on her own, because as you’re going through the atmosphere during that seven minutes of terror, you can’t call home for help. We’ll just acknowledge that there are problems and move on and keep trying to land successfully because there’s no reason to stop. Stopping is also death. So you might as well keep going.
[6:03] Narrator: Al has spent years making sure those seven minutes will go like clockwork.
Al Chen: Between Curiosity and Perseverance, I’ve put in personally 19 years for 14 minutes. It was 10 years for the first seven minutes, and then nine years for the second seven minutes.
Narrator: Those seven minutes are transformational as the spacecraft sheds parts of itself that are no longer needed, while activating other parts for the first time.
Al Chen:We’re basically flying multiple different types of spacecraft. We fly one throughout space. We fly another through hypersonic and supersonic flight. Then we fly another one with a parachute. And then once we’re done with the parachute, we fly this other – what we call the powered flight vehicle – the descent stage and rover put together. And then we transform that vehicle at the end into the sky crane to put the rover down. So it’s a constant series of things that have to go right, flying all these individual pieces of the spacecraft together in concert. And it’s not just those cornerstones, but even these more basic parts of the system, any of which going bad means a bad day for everybody.
[7:06] Generally, when you have a spacecraft, you don’t want to take it apart until you’re sure you want to take it apart. So things like popping off the heat shield, we have these bolts that hold the heat shield on, and we use – they’re called pyrotechnics because we’re breaking those bolts with explosives.
(sound effect: multiple explosive bolts)
Al Chen:And also, in other places where we have different parts of the spacecraft connected to each other with tubes or electrical lines, we use pyrotechnic devices to fire cutters – basically explosively-actuated knives – to cut through different parts of the spacecraft to separate them. There were upwards of 70 of those on Curiosity.
Narrator: Even if the engineers are confident that every aspect of their landing system will work, there’s still the uncontrollable nature of Mars itself. The mission has to forecast far in advance how Mars will behave on landing day. Here’s JPL engineer Swati Mohan, who led guidance, navigation and control for Perseverance.
[8:06] Swati Mohan: We take into account so many different attributes in the selection of the launch period and the landing period that it’s crazy. We have to take into account the dust season on Mars, the solar cycle season, the angle of the Sun at the proposed landing time. We’re deciding this in like 2012, 2013 for things that are going to happen in 2020 and 2021. And there’s a cyclic nature to it. Earth and Mars, the way they traverse around the Sun, they come into alignment a little over every two years. So we can get the shortest duration to Mars if we launch during that three-week window.
And then, Mars is extremely challenging to land on, and it’s for a number of reasons. The terrain relief at Mars, depending on where you’re going, can be really drastic, to extremely high like at the top of Olympus Mons, or really low.
[9:08] Mars is smaller than Earth. It has less gravity, but it also still has an atmosphere. And now, the atmosphere is about a hundred times less than Earth’s, so it’s in this category where it’s just thick enough that you have to account for it. It’s not like landing on the Moon where there’s no atmosphere and you can go straight down. And the atmosphere changes with the seasons on Mars, so even that variation will give you several hundred meters of extra performance depending on how dense the atmosphere is in the season that you choose to go.
So all of these accommodations for gravity, for terrain, for solar illumination and dust cycle and atmosphere, we have to build in those smarts into the vehicle to manage all of that on the fly as it’s descending in order to land safely on Mars.
[10:03] Narrator: Once the spacecraft reaches Mars and begins its swan dive towards the surface, one person in Mission Control is tasked with calling out every step, similar to how an Olympics commentator explains an ice skater’s performance, detailing the movements and leaps that result in, hopefully, a triumphant finale. For the Perseverance rover’s landing, that commentator was Swati.
Swati Mohan: I knew intimately everything that really could go wrong and what it took for everything to go right in order to actually land on the ground successfully. The role of EDL Commentator, I think the most nerve-wracking part was knowing what to do if things didn’t go the way we wanted them to go. I had this huge flowchart of: if we see this data, then say this. If we see this data, then stop talking, and someone with a much, much higher pay grade will take over.
[11:04]EDL Commentator Swati Mohan: Perseverance now has radar lock on the ground. Current velocity is about 100 meters per second, 6.6 kilometers above the surface of Mars. (applause)
Swati Mohan: The first time I saw footage of the entirety of Perseverance entry, descent and landing was six months after the actual landing day. I think until then it was still too much of a traumatic event for me to watch. But I was shocked by the way it was perceived – in that show, it just has me stating out all of the events as they happened. But that wasn’t my experience at all, actually. For me, I had the whole of the entry, descent and landing team in my ears. I heard all the voices that we’d been working together for years calling these events one after the other.
Now, they were all calling it in the technical speak, right? All the acronyms and jargon, shorthand that we had given these events, and my job was to translate that from what they said into something that the public could understand.
[12:05] But it really was a very surreal feeling. There were parts of it that we could imagine was just like another simulation. We had made the team practice two or three times these exact scenarios to make sure they knew what to do when they got to that actual landing day. But when it really hit home was when that first image came back from Perseverance.
When we did our simulations, that image that would come back would be the testbed engineers in the mock-ups with like two thumbs up. But on landing day, getting that first image from Perseverance that showed Mars, and showed a safe rover on the surface, was just phenomenal. It meant that everything had worked smoothly. It was on the ground, safe, not upside down or anything strange like that. (laughs)
(intro music)
[13:26] Narrator: Welcome to “On a Mission,” a podcast of NASA’s Jet Propulsion Laboratory. I’m Leslie Mullen, and in this fourth season of the podcast, we’ve been following in the tracks of rovers on Mars. Before a rover can begin to make wheel prints on the Red Planet, it first has to make the harrowing journey from Earth to Mars.
This is episode nine: Before You Can Drive, First You Have to Fly.
(music)
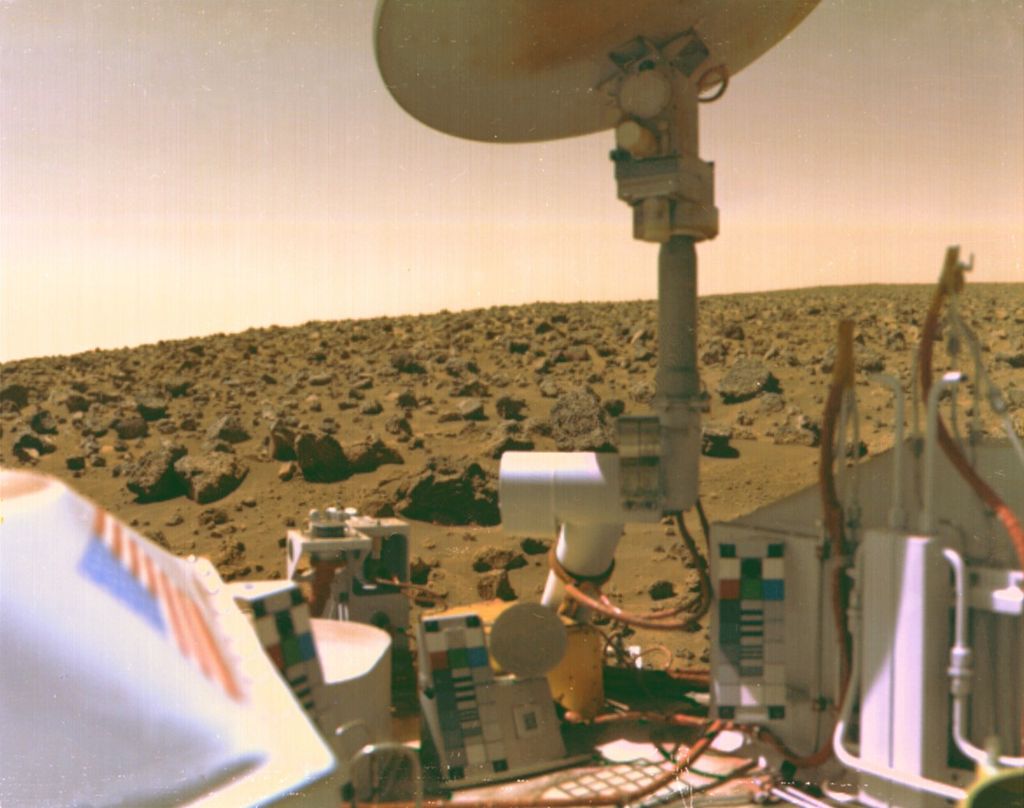
Narrator: A successful Mars landing is the culmination of years of experience that began in 1976 with NASA’s Viking 1 and 2 landers.
[14:05] Al Chen:We always lean on the things we’ve learned before, and some of the decisions we made before shape what we do next. Go all the way back to Viking, right, back to the seventies, we knew very little about Mars. We still don’t know that much about Mars, but we know a lot more than they did back then. We didn’t know how thick the atmosphere was. We knew it was thin, but we didn’t know how thin. And we pretty much didn’t know what we would find on the surface.
Narrator: Besides telescope observations from Earth, NASA had sent the Mariner missions in the late 1960s and early 70s to fly by Mars, or in the case of Mariner 9, to orbit the planet. But still, images from those missions didn’t provide fine details of the planet’s surface.
Al Chen: The cameras that we had going by were pretty low resolution. You couldn’t see individual rocks or the local terrain on the scale of the thing we were trying to land, which was the Viking landers.
[15:00] Nowadays we tend to go on what we call “direct-entry trajectories.” Instead, what Viking did was they had the lander attached to the orbiter and sent both together, both for Viking 1 and Viking 2, to Mars, and then put both in orbit prior to separating the lander to land on Mars. And that did a few things for us, right? Because we knew very little about Mars, it allowed the orbiter to do some reconnaissance before trying to set the lander loose to try to land safely on Mars. So that was a big difference from what we do now.
But a lot of the pieces that you see in Viking will reappear for us. They knew that they had to slow down through the hypersonic portion of entry, descent and landing, and deal with the heating that they might see. And in fact, the same shape forebody that Viking flew, we continue to fly to this day. Every NASA mission that has flown to Mars has had the same shape heat shield. It’s a 70-degree sphere cone. It might have been different sizes, but it’s had the same front – we’ve presented the same face to Mars every time.
[15:57] Viking had the ability to kind of steer itself during entry – it had a little bit of lift like Curiosity and Perseverance – but because they were so concerned about how thin the atmosphere was and not quite knowing how high the elevation was, everything about Viking was trying to get altitude. They had a radar that could actually look through their heat shield and see how high they were as they went. They were deathly afraid of being unable to stop in time. So as part of that, they developed supersonic parachutes. With that supersonic parachute, they got to the point that they could jettison their heat shield and use a more precise second radar that helps them get velocity on the way down. Then, just like us, they rode the parachute as long as possible, and then needed engines to finish the job.
Because Vikings landed on legs, they had these engines with a bunch of little tiny nozzles we call a showerhead. Instead of one giant nozzle that can create a lot of disturbance on the ground – if you think of like a focused jet coming out of a rocket and then hitting a ground, which they didn’t know how hard the ground was, whether it was kind of sandy or whether it was rock hard. They were afraid of what we like to call “digging your own grave.” The rocket engines create craters that you end up landing the vehicle in – you just dig a giant hole.
[17:09] So because they were worried about that, they took these throttle engines – engines that you could control how much thrust was coming out of them very precisely – but added these showerhead nozzles to try to reduce how much of a ground disturbance there was. And they used those three engines to fly all the way to the ground, and then shut those engines down as they touched down.
Narrator: After the Vikings, NASA didn’t send another lander to Mars for 20 years. The experiments on Viking designed to detect life were inconclusive, and so NASA focused on other aspects of space exploration. When NASA decided to give the surface of Mars another go in the 1990s, the EDL engineers had to recreate the Viking landing system, but adapt it for the Pathfinder lander and the little Sojourner rover it would carry.
[17:57] Al Chen: Pathfinder itself in many ways was an attempt to show that we could land on Mars again. But Pathfinder tried to land on Mars with a lot fewer resources than Viking. So it didn’t go the same approach of trying to go with an orbiter into orbit. We don’t want to make an orbiter; we just want to land on Mars. When we launch, we’re going to head right for Mars and the Mars atmosphere.
Now we know a little bit more about the atmosphere, we’re a little less worried about trying to stop in time. So instead of trying to control the vehicle in the upper part of the atmosphere, let’s make a cannonball, and just go where it goes. So that takes us down to the supersonic portion of flight. Let’s keep that piece of Viking, that supersonic parachute, because otherwise we’re going to hit the ground way too fast, but with more modern materials.
And that’s where things get pretty different. Things like throttle engines that Viking developed were pretty expensive. So instead of throttle engines, we have solid rocket motors that are pretty much “bang, bang” things. There’s two throttle levels on a solid rocket motor: on and off. So now we have this, what we call a “three-body system”: the parachute up top, the back shell in the middle with its rockets, and a lander encased in airbags dangling off the bottom of it. When we get close to the ground, we’re going to inflate these airbags.
[19:07] (sound effect: airbags inflate)
Al Chen: It’s about two stories tall, so this isn’t small. We have a small lander encased in two stories worth of airbags (laughs) trying to protect it for dealing with hitting things like rocks and other terrain. And then when we get really close to the ground, let’s fire up those rocket motors that are above us.
(sound effect: rocket motors)
Al Chen: Really slow down at the end. So this is going from 50, 60 miles an hour, to nothing, or as close to zero velocity as possible, and cut that lander loose.
(sound effect: lander cut loose, airbags bouncing)
Al Chen: And that lander, of course, is encased in airbags, will hit the ground and bounce a bit and maybe roll some, but hopefully those airbags will protect us. And then once you’ve come to a stop, you can deflate those airbags, and open it up. And that’s your lander on Mars, safely. And that’s exactly what happened with Pathfinder.
Narrator: After the success of the Pathfinder lander and Sojourner rover in 1997, NASA was ready to send more rovers to Mars. But the landing recipe had to be tweaked again for the twin rovers Spirit and Opportunity that were each scheduled to arrive on Mars in early 2004.
[20:09] Al Chen:For the most part, the landing looks similar: we’re going on a direct path to Mars with a ballistic entry, same kind of heat shield, solid rockets in the back shell, airbags to finish. But because the mass has gone up a little bit, we had to add a new system to Spirit and Opportunity to help deal with horizontal velocity.
So previously, Viking with its throttle engines could control vertical velocity and horizontal velocity on the way down. With Pathfinder, with just those solid rocket motors, we pretty much had to deal with whichever way the back shell was facing was the direction that those rockets were going to fire, and that’s the direction we were going to slow down.
And so, that meant sometimes if the back shell was tilted as things were swinging around in this three-body system – where you have this parachute, and you have this back shell, you have this lander – if the back shell’s rockets aren’t pointing straight down when you fire those rocket motors, you’re going to pick up velocity going horizontally. And that can be bad. The airbags can only deal with so much. As the rovers got heavier, and therefore the whole thing we’re trying to stop gets heavier, the airbag materials that we used were struggling to deal with things like sharp rocks.
[21:11] So we had to add a system for Spirit and Opportunity where we took a couple of pictures as we’re going down and tried to figure out from those pictures how fast we were going sideways. And then we added these little tiny rocket motors that pointed sideways on the back shell so we can kind of push it a little bit one way or the other, and therefore the airbags wouldn’t have to deal with a ton of sideways-type forces that could tear them up and cause us to have a bad day.
(music)
Narrator: When designing the nearly one-ton Curiosity rover, even more drastic changes had to be made to the landing system.
Al Chen: As you go from Spirit and Opportunity to the next rover, to Curiosity, we’re going from about 170 kilos of rover, to about 900 kilos of rover with Curiosity. These airbags are an energy absorption system, and as the mass gets now five times bigger, you have to deal with a lot more energy. But the airbags were at the limit of what we thought we could do from a materials perspective. So when we get to Curiosity, we had to come up with a new approach.
[22:15] Part of Curiosity, and the idea of landing such a much bigger rover, was that we were also going to build bigger wheels and a bigger suspension system for being able to drive around on what Mars could throw at us. We didn’t want to just drive around on flat stuff; we wanted to go up really steep hills or drive over rocks. So that left us with an opportunity on the entry, descent and landing side of things. Why not try to use that system that’s already built to deal with Mars to land on it, too?
Narrator: The rovers Sojourner, Spirit, and Opportunity had all been tucked inside a landing platform as well as airbags. After landing, the airbags deflated, the platform opened up, and a ramp extended to provide a path for the rover down to the surface of Mars. Curiosity would need no such platform for its touchdown.
[23:04] Al Chen: The whole idea behind sky crane is, let’s land the rover on its wheels, so long as we touch the rover down slow enough that the loads it sees at touchdown are not any worse than it would see driving around on Mars – and by loads, I mean the forces. If the vehicle falls off of a rock while driving around, it’s going to see some amount of shock and other forces that are going to go through the rover. If we can put the rover down softly, as soft as if it fell off a rock on Mars, then we don’t have to build another lander or develop airbags or anything else to help cushion the blow of touchdown.
So to be able to get the rover down, we needed a couple more cornerstones of our landing system. One of them is a radar. We needed a much more precise altimeter and velocimeter – the ability to know exactly how fast we’re going, down to a tenth of a meter per second accuracy. And on top of that, knowing about it is one thing, but being able to control it is another thing. But solid rocket motors, which have two settings, right – on and off – are not going to do that job. But good ideas never die. Viking had those high-precision throttle engines; we could dial in pretty much whatever thrust level you wanted.
[24:11] Since it was the 1970s when they developed it, and now it was the early 2000s, we had to do a little bit of an archeological project to figure out how to rebuild those engines. And that meant finding stored old engines that were in cases under people’s desks, opening them up, cutting them up to see what was in them, finding all the blueprints for them, trying to figure out how to build those engines again.
But we made a change. Instead of those showerhead nozzles, right, all those small engines to deal with the ground plume disturbance – the thrust of the rockets hitting the ground and making giant craters – now that we’re putting the rover below us and the engines above, with this rocket-powered jetpack, we don’t need those showerhead nozzles anymore, because the engines are further away from the ground. So we can actually make a more efficient system with just a single bell nozzle. And of course, because we’re landing so much more mass with this nine hundred kilo rover, instead of having just three engines, which is what Viking had, we now have eight.
[25:06] Narrator: The sky crane and rocket motors weren’t the only changes needed to land a bigger, heavier rover on Mars. Curiosity’s size also caused problems higher up in the atmosphere. The team wanted to use the same kind of heat shield that had protected the previous rovers from the blaze of entering the Mars atmosphere, but Curiosity was so big, the heat shield and backshell of the rover’s space capsule, together called the “aeroshell,” had to be bigger too.
Al Chen:We went from aeroshells that were 2.65 meters in diameter, to a 4.5-meter diameter aeroshell for Curiosity. And that wasn’t free, not just from a “building a bigger structure” standpoint, but also from a heating standpoint. As you build bigger and bigger spacecraft, you begin to develop turbulence on the heat shield, which causes increased heating. So, as our spacecraft gets both heavier and wider, we have more energy to bleed off.
[26:06] We’d originally intended to use the same heat shield thermal protection material that’s worked so well for Viking and Pathfinder and Spirit and Opportunity. But as we started testing to see if that material could deal with the heating conditions we were expecting to see with Curiosity, it just disappeared.
(sound effect: heat shield material destroyed)
Al Chen:It just bled away like crazy. And this was already pretty late in development for us. Design was set, we were getting ready to build everything, and had very little time. We were two years from launch, and we had no heat shield material. But luckily, NASA was working on a new thermal protection system material called PICA – phenolic impregnated carbon ablator. And we jumped on that right away.
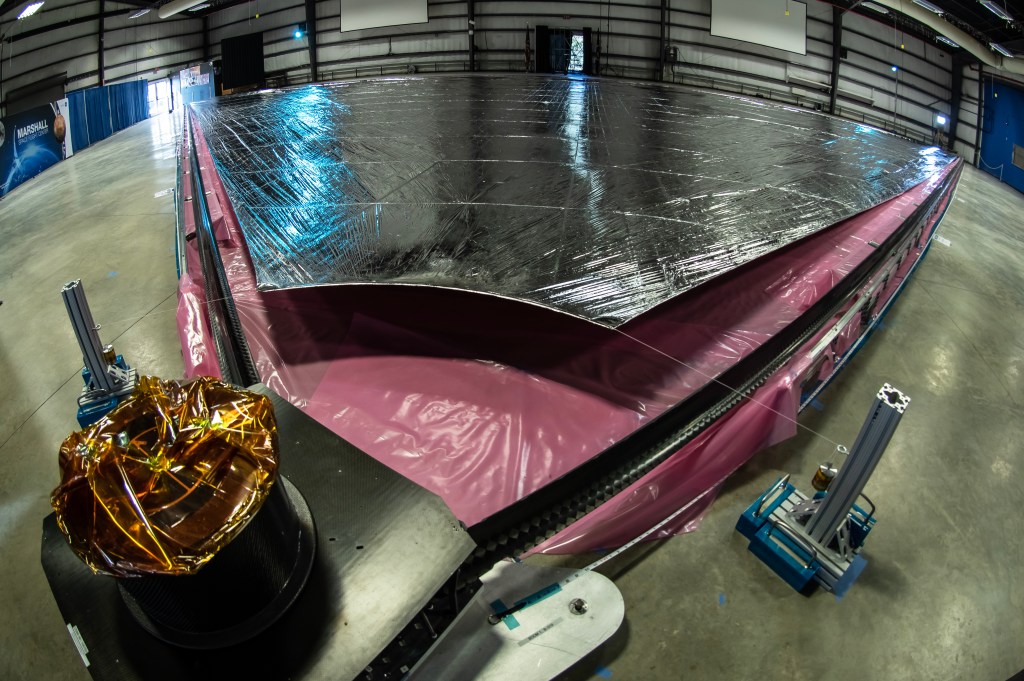
Narrator:Curiosity’s parachute also needed to be super-sized, and again, this led to problems.
Al Chen: The parachutes that we’ve used before, even the Viking-size parachute, which was bigger than the parachutes we used for Spirit and Opportunity, was not going to be enough to slow us down enough. They had a 16-ish-meter parachute for Viking. And we decided that we needed a 21-meter parachute to be able to stop.
[27:12] So we developed a bigger parachute. Again, along the same lines as the Viking design, same shape, just scaled up. And with more modern materials, materials more along the lines of what we’d flown on Spirit and Opportunity. And we took that into the biggest wind tunnel here in the United States, up at Ames Research Center, and had a lot of adventures there too, which usually involved us blowing up chutes, with them inverting and whatnot.
(music)
Al Chen: On Mars, we fire this parachute out of the back of the spacecraft with a mortar or this cannon. And then the parachute inflates in less than a second, in about six-tenths of a second or so. So it’s lightning fast how it goes from being really packed, to the density of wood, and then it just inflates extremely violently and extremely quickly to its full size, starting off about the size of an oil can, eventually getting to that giant size – it’s about the size, when it’s inflated, of a Little League infield.
[28:08] But the bigger the parachute you have, the longer it takes to inflate. Which on Mars is not such a big thing because we’re talking about five-tenths of a second instead of six-tenths of a second. Everything is fast. But here on Earth, it can take seconds. We’re testing in a wind tunnel that’s at sea level. The atmosphere is much thicker, and things like gravity can start acting on the parachute.
So as we fire this parachute out of the cannon, it stretches out in a line before enough air fills up the parachute to fully inflate. And during that time, the top parts of the parachute can fall, and what we call “leading edge crossover,” we have the top edge fall below and through the other lines. And then, when finally enough air gets into the canopy to inflate, everything is misshapen and it tears itself apart. So that’s not great.
[28:53] But we eventually decided that this was an Earth-test problem. Because, on Mars, the parachute inflates so quickly, the effects of things like gravity and taking seconds to inflate, there’s not enough time on Mars for those things to occur, so we won’t have these types of crossovers on Mars. So to deal with that here on Earth, we actually added anti-inversion nets – nets that we put between the lines on the edge of the canopy of the parachute to prevent the parachute from pulling itself through where we didn’t want it to pull through.
By the way, this method of testing parachutes in wind tunnels was not new. For Spirit and Opportunity, we actually went to this same wind tunnel, but never really saw this problem because the parachute was smaller, so it didn’t take as much time to inflate. So, even when you think you’re doing something simple, like scaling up a parachute, using the same shape and same materials and just making it a little bigger, things that you don’t see coming can bite you.
Narrator: All the changes needed for Curiosity’s flight to Mars unsettled the team. Space missions rely on technology that has proven to work well, and even tiny changes to a system can alter it in unpredictable ways – a butterfly effect that could cause the rover to plummet towards catastrophe.
[30:02] Al Chen: We were scared. There’s always that point in a mission where I feel like you have some buyer’s remorse. Can we really do what we said we were going to do? And I think that in Curiosity, we realized even early on in that mission that we were biting off a lot of new stuff. But confidence increases with every success. And of course, the confidence we gained on Curiosity was immense.
Curiosity rover landing: EDL Commentator Al Chen:Touchdown confirmed. We’re safe on Mars. (applause, screams)
Narrator:Even though Curiosity landed successfully, when the EDL team later reviewed all the details, they discovered it hadn’t been error-free.
Al Chen:The biggest mistake that I’m still embarrassed about on Curiosity became pretty obvious when we tried to reconstruct the touchdown velocity. Remember that we were trying to touch down slow, and by slow we meant touching down at about a mile and a half per hour, about 0.75 meters per second. But we touched down at a little over 0.6 meters per second, which is slower than we had intended. Hitting too slow is not good because, for one thing, you’re going to use more fuel. And two, it tells you that you didn’t understand something.
[31:08] For where we went in Gale Crater – this 100-kilometer-wide crater that’s 4.5 kilometers deep, with a 5-kilometer mountain sticking in it – we got something fundamental wrong, and that turned out to be gravity. Just like gravity is a little different near the Himalayas here on Earth than it is in other places on Earth, we did not account for that effect at Gale Crater, and that’s what caused us to touch down too slow. We thought the gravity was a certain amount, and we were about 400 microGs off from what we expected. Not a ton, but we definitely did not want to make that mistake again.
It didn’t cost us on Curiosity. We had plenty of extra fuel, but it could have been the other way, right? We could have touched down harder if we were wrong about gravity in the opposite direction. So one thing we did between Curiosity and Perseverance was to develop high-resolution gravity maps of Mars.
[32:00] Narrator: Another unexpected aspect of Curiosity’s landing led to changes in the parachute for Perseverance.
Al Chen: When the parachute deployed,as the parachute’s trying to stretch out all the way before inflation, along the way we were getting navigational errors. So that’s weird. We’ve got an inertial measurement unit – think of it like your inner ear trying to figure out which way is up and how fast we’re going and how much acceleration we’re under. And when you throw something out the back really fast, and then it hits the end of this really stiff rope, it yanks on the whole system really hard and shakes things.
(sound effects: parachute, wind, shaking metal)
Al Chen: So, we’d switched to modern materials on our parachutes since Pathfinder – this is where it kind of bites us again, little changes. Modern materials like Kevlar and Vectran and those types of materials are a lot stiffer than what we used to use in the past. And that means they transmit shock through the system. And as it turns out, it happened to shake the panel that our inertial measurement device was on at a frequency that’s similar to one of the resonant frequencies within the device itself. So it magnified this shaking and ended up causing the vehicle to think that some rates and some accelerations were happening that weren’t actually happening to the whole vehicle, they just happened to be sensed because we were shaking this panel like crazy because we had whacked it pretty hard by deploying these parachutes.
[33:20] So we actually made a few changes to both the parachute system and to our sensor and the way we were using it to reduce our sensitivity to that problem.
Narrator:Because the Perseverance rover was similar in size and weight to Curiosity, the team thought they wouldn’t have to make many changes to the space capsule. In fact, they even planned to use a heat shield that had been originally made for Curiosity more than a decade earlier.
Al Chen: Typically, when you build a spacecraft, you build a flight article – the flight article is the one you actually send to space, or to Mars in this case. And the other is the spare in case something bad happens to the flight one, you can swap it out with the spare and fly that. So we figured, “Hey, there’s a pretty good spare heat shield that we qualified for use on Curiosity. And we’re doing basically the same thing with Perseverance. Why don’t we just fly that?”
[34:07] This heat shield had been sitting around in storage for a while, and we dusted it off. But to be sure that it was still a good heat shield and that the time in storage hadn’t caused problems, or there weren’t significant differences from the one we actually flew to Mars, we did a loads test on it. Because, as you’re coming through that hypersonic period where you’re trying to survive the intense heating that’s occurring, the fact you’re traveling hypersonically and using the atmosphere to stop puts a lot of force on the entry vehicle. In fact, we designed Curiosity and that heat shield to be able to stand 15 Earth Gs of deceleration – 15 times the force of Earth’s gravity here on the ground, which is a lot. That’s the nice thing about flying robots instead of flying people. 15 Earth Gs are going to turn pretty much even fighter pilots into goo. But the 15 Earth G’s on a robot, no problem.
But when we started subjecting it to those loads, it broke. We developed a nice crack all the way around the heat shield. So that heat shield did not fly to Mars on Perseverance. (laughs)
[35:05] Narrator: Beyond necessary changes like a new heat shield, the EDL team also wanted to make improvements to the landing system. One upgrade, called a range trigger, was a simple alteration of just a few lines of computer code.
Al Chen:This is an idea actually that we had on Curiosity, but decided that we had too many new things already, so this idea of range trigger was just a step too far. But for Perseverance, let’s see if we can add this new piece of the puzzle. And that’s the ability to deploy the supersonic parachute based on where the vehicle thinks it is.
With Curiosity, all we did was deploy the parachute when you get to a certain velocity. When you realize you’re going the right speed, deploy that parachute, and wherever you are is where are you going to come down. So let’s make things a little smarter for Perseverance. Let’s now give Perseverance the ability to deploy the parachute based on where it was, and not just velocity, as long as it was within a safe velocity range to deploy that parachute. And that allowed us to shrink the landing ellipse – the places that we could come down on the ground – quite a bit, because we were deploying the parachute much more accurately.
[36:12] So we went from an ellipse that was 20-ish kilometers long by 10 kilometers wide or so for Curiosity, to a landing ellipse for Perseverance that was about 7.5 kilometers long by 6.5 kilometers wide. So we shrank the area that we could come down quite a bit. Suddenly we can take this landing ellipse and put it into tighter spots, and thread the needle and be surrounded by hazards, but be okay.
Narrator: The Perseverance landing system had another innovation that allowed it to aim for riskier areas where previous missions had feared to land.
Al Chen: There are places that the scientists have always wanted to go to, but our landing technology was not good enough to get us there. There’s always this tension between scientists and entry, descent and landing engineers. All geologists love the Grand Canyon. They want to go visit the place where all the history is laid out for you in cliff faces that are easy to access, scientifically interesting targets – or, as I like to call them, death traps!
[37:08] Entry, descent and landing guys like me are looking for parking lots. Flat, boring places. Before Perseverance, we were looking for a huge place – kilometer-long city-like areas – that was as close to a landing strip as possible. So the question for us was then, “Can we add a capability that would allow us to fly to safe spots in a landing ellipse?” We can have lots of little tiny parking lots, and then we can have those scientifically interesting death traps in the landing ellipse. You know, we don’t need to land far away in the Great Plains and then drive to the Grand Canyon. We can go land ourselves in the parking lot next to the Grand Canyon itself. That’s the idea behind Terrain Relative Navigation.
So, after the parachute deploys and after the heat shield comes off, even though we’re rushing at the ground at 160 miles an hour still – we’re going at race car speeds – that’s when the elevator music comes on for me.We’re waiting.
(elevator music)
[38:02] Al Chen: We’re just waiting for the next part. We’re on our way down, hopefully calmly, maybe not so calmly. But the vehicle itself is looking at the ground, it’s seeing it coming up at it, and it’s dealing with it. Let’s take advantage of that period when we’re on parachute to figure out where we are.
Narrator: To do this, the rover would use an updated version of the image processing system that had helped Spirit and Opportunity figure out their sideways movement as they hung from their parachute. Swati Mohan’s team added this improved capability to Perseverance.
Swati Mohan: The Lander Vision System is the big part of the Terrain Relative Navigation system. I was there from the beginning to figure out how we should surgically insert it to the heritage Curiosity entry, descent and landing system. How do we bring all those pieces together to make sure it works on landing day?
(music)
Swati Mohan: The Curiosity entry, descent and landing system primarily uses a radar to determine where it is with respect to the surface. This is somewhat like closing your eyes and putting your hands out and feeling the ground. You can tell how far you’re away from the ground based on when your fingers hit, but you can’t tell where you are, or what ground you’re hitting on.
[39:15] And what Terrain Relative Navigation allows us to do is actually land with our eyes open. We add a down-look camera that’s taking pictures of the surface as we’re descending, and it’s comparing to a map that we’ve pre-made using orbital imagery, and it can correlate them and say, “Based on these images, I am here on Mars at this time.”
We had a second onboard map that we had identified all the different hazards to various degrees of where the cliffs were, where the slopes were, where the inescapable regions were. And then when the vehicle figured out where it was, it could say, “Okay, I’m here. I can get to these regions based on how much fuel I have on board. What’s the safest spot in the region that I can get to for me?”
[40:07] Narrator: The site selected for Perseverance would be the most dangerous landing spot ever attempted on Mars.
Swati Mohan: Perseverance was targeted to go to Jezero Crater. It was actually considered for previous Mars missions like Curiosity but deemed too hazardous. And Jezero Crater we believe is an ancient lakebed on Mars, and there are features of river channels actually flowing in the Delta into Jezero Crater.
Narrator: The Lander Vision System, also known as LVS, or “Elvis,” would determine where the rover was located above Jezero Crater’s jumbled landscape in just a few seconds. But LVS kept crashing during early testing.
Swati Mohan: We’ve done it in piecemeal blocks, but we’ve never put the whole system together. And we created this standalone test, before we run full entry, descent and landing, to put the inputs in and see if that works. And it’s not working. It’s not working. I was like, “I don’t know what the problem is. I’ve debugged everything that I can think of. All the different pieces work, but when I run it, it just doesn’t work.”
[41:16] Narrative:At a loss for why the test kept failing, Swati decided to try a different approach. Rather than just test LVS, they would run the entire computer sequence for entry, descent and landing.
Swati Mohan: Let’s just try. Put the whole thing together and see if it’s going to work without any other modifications. It was a total Hail Mary. Go for the whole enchilada, and fingers crossed that it’s going to work. And it’s not a small deal to go for the whole enchilada. Just setting up for seven minutes of entry, descent and landing takes like five hours in the test bed. So it’s not a trivial thing. And if it doesn’t work, there’s even more hours to clean up and things like that.
[41:57] So, there’s three of us, and to be honest, I don’t think any of us thought it was going to work, because this was like three or four weeks of it consistently not working. So we had queued it up – and it has to work in 10 seconds, and we get data every second – and suddenly it starts scrolling fast. I’m like, “Wait, wait, what’s going on?” Because in all the other cases, we’d gotten one or two lines and it just stopped – equivalent of crashing. I look at it and I’m like, “It worked?” I look over at Aaron Stehura, who is in the test bed with me. He’s like, “Oh my gosh.” And we just started jumping up and down.
And that was the first day that I finally felt like we had a mission because the design, as we had envisioned for Perseverance with all the new upgrades in the new flight software, actually worked. So once we proved that it worked in the end-to-end system, we could isolate what it was that was going wrong.
Elvis Presley song:“There’s so much world to see for me, there’s so much world to see.”
[43:05] Narrator: The momentum to finish building and testing Perseverance crashed against the surge of the coronavirus pandemic in early 2020. The launch was scheduled for that summer, and the team scrambled to keep working while also staying safe so the rover could launch on time from NASA’s Kennedy Space Center in Florida. The COVID precautions meant those monitoring the launch from JPL’s Mission Control in Southern California couldn’t easily partake in a long-held tradition.
Swati Mohan: We weren’t allowed to eat our peanuts! We had to go out and eat them and then come back in. It was just this whole thing because of the face masks.
Narrator: The lucky peanuts have their origin in the 1960s, with the robotic Ranger missions to the Moon.
(music)
Narrator: Rangers 1 through 6 all failed in different ways. For Ranger 7, an engineer named Dick Wallace shared peanuts around JPL’s Mission Control as a way to calm their jittery nerves. That mission was a success, and so were the next two missions, Rangers 8 and 9. Ever since, peanuts have been on hand for big events like launches and landings.
[44:18] Sneaking outside to eat lucky peanuts seemed to do the trick, since the launch of Perseverance was successful, although there were some issues.
Swati Mohan:The first dramatic moment was right before launch, about 10 minutes before the rockets were supposed to ignite. We had an earthquake here at JPL in Mission Control. The whole room shook, and I remember thinking it was just insane that we had to do a pandemic and an earthquake on the same day. Thankfully, it was pretty small, but it was just one of those moments where I was like, “Really? Really?”
[44:58] The second thing, right after launch, we saw all the beautiful footage from our launch vehicle providers, which was great. And then came the time that we had to actually acquire signal, but we can’t talk to it. And that started a whole other chain of events. We’re like, “We can see the vehicle, we see that there is a signal, so at least it’s alive.” But something had happened, and we had to figure out what could it be so we can change our settings to be able to talk to it.
And what had actually happened was there was a piece of hardware that had failed during launch, and the vehicle had put itself into a safe mode and swapped to the backup. The vehicle had done everything that it was supposed to do, it’s just we hadn’t expected that that piece of hardware would fail during launch. So that caused a little bit more drama. But by the end of that first shift, we had a plan to get it back up, and then within a few hours we were pretty much back on track.
[45:58] And I remember that specifically because we launched on July 30, and my birthday is August 1. So if we hadn’t gotten back on track, I would have had to go in to Mission Control on my birthday, which I did not have to do. So, it was a really nice birthday present. (laughs)
(music)
Narrator:For the many months of its space flight, Perseverance was in steady contact with JPL’s Mission Control, providing updates on its overall health, and receiving instructions to use the capsule’s thrusters to keep flying in the right direction. As the capsule got closer to Mars, the EDL team directed the rover where and when to begin its dive into the atmosphere.
EDL commentatorSwati Mohan: Perseverance has passed through the point of maximum deceleration, and has indicated that it felt approximately 10 Earth Gs of deceleration.
Narrator: COVID face masks were still required by landing day on February 18, 2021, so as Swati called out the different stages, she had to work harder than any previous EDL commentator to make herself understood.
[47:06] Swati Mohan: Not just one face mask. I had two face masks on: the N95, and then the cloth face mask above that.
(applause)EDL commentatorSwati Mohan: Navigation has confirmed that the parachute has deployed, and we’re seeing significant deceleration in the velocity…
Swati Mohan: I think the biggest relief I felt was when I heard that the parachute had deployed and we were seeing the deceleration. The parachute is one of our single points of failure. If it doesn’t deploy at the time that it needs to, 30 seconds later, you’re hitting the ground and you crash.
Mission Control: TRN Safety Bravo.EDL commentator Swati Mohan: We have completed our Terrain Relative Navigation, current speed is about 30 meters per second, altitude of about 300 meters off the surface of Mars.
[47:55] Swati Mohan: There was one other time where I got a little bit more worried during entry, descent and landing. There was one of the calls that was talking about where Perseverance chose to go. As part of this whole Terrain Relative Navigation, we had put in features of Perseverance, telling us, “Okay, I’ve completed Terrain Relative Navigation and I’m going to this spot.” And we had encoded into our telemetry the hazard level of the safe target that it had selected.
Now, in all of our simulations, we had coded the bin such that, almost always, it picked the safest bin. But on landing day itself, that’s not what we got. We got the second bin lower to that – not the safest, but the second safest, which was the call, “TRN Safety Bravo.” And from that, I’m like “Uh oh.” Where exactly are we going? So it’s a little bit riskier. We’re like, “Okay, maybe it’ll work out.”
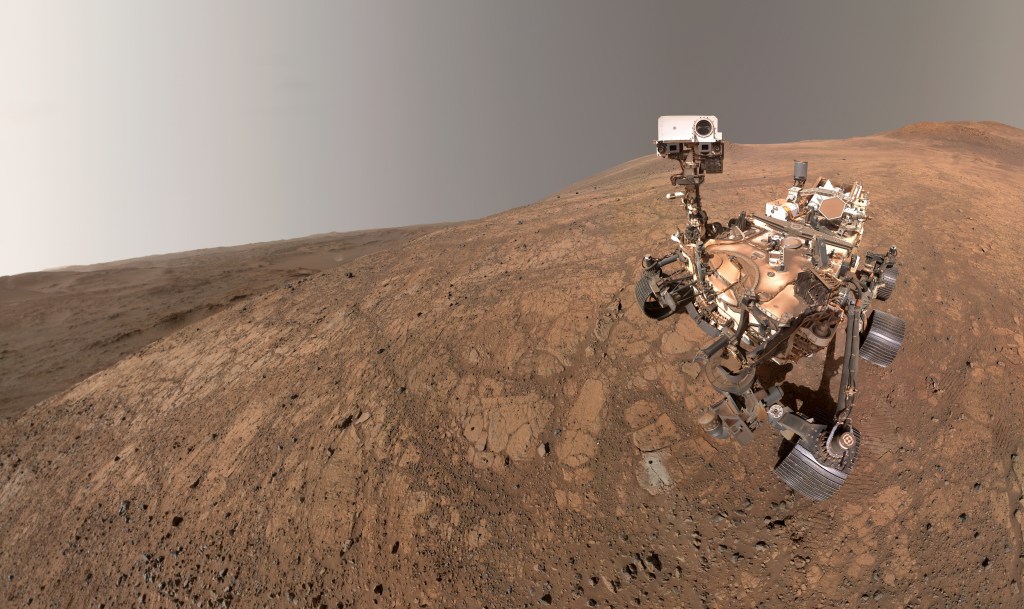
[48:55]EDL Commentator Swati Mohan: Touchdown confirmed! Perseverance is safely on the surface of Mars, ready to begin seeking the signs of past life.(cheers)
Swati Mohan: The entry system actually overshot a little, so we came in closer to the southeast portion of the landing ellipse, and that’s just a rock field. But in the end, the system performed flawlessly. We landed so accurately that we landed right in the flat area, with the rocks kind of surrounding us.
Narrator: After landing Perseverance, as with every mission, the EDL team spent months looking over the data to see what had or hadn’t gone according to plan. Video cameras on Perseverance provided stunning views of the rover’s descent through the Mars atmosphere.
Al Chen: We’d literally never seen a parachute inflate on another planet before. So, we put cameras on there to see that, and then to be able to tell which way the parachute was actually inflating, and which parts of the parachute were headed where during that chaotic inflation process, and afterward to see as the parachute might be clocking, we put a design on there to help us see which way the parachute was oriented. And also, put a little message in there, too, just for fun.
[50:06] Narrator: What looks like a random design of orange blocks and stripes on the white parachute actually encoded a JPL motto, “Dare Mighty Things.” The video footage also showed something that took the engineers by surprise.
Al Chen: The parachute, when it’s inside the vehicle, has a lid on top of it to protect it so that it doesn’t get too hot during that aerodynamic heating during the hypersonic portion. And then we fire the parachute out through that lid using a cannon. And that lid flies away, hopefully to never be seen again.
That lid had this radome on top of it to allow an antenna to be able to transmit radio frequency through it, for use during cruise. That radome was supposed to stay attached to the parachute lid as it was pushed away by the parachute pack, and it did not. It ripped off from that lid, and you can see it become a free flier. Which is not great, because we’re firing this thing out the back of the vehicle as we’re traveling supersonically, and then we deploy this parachute and stop right in front of the thing that we just ejected. Luckily it did not happen to us on Perseverance, but you’re worried that things like that radome, as we stop right in front of it, could come right back through the parachute and either tear a hole in it, or hit the vehicle. So that’s a concern.
[51:15] But from the rest of the camera footage of the parachute, everything looked great. The parachute inflated in a very symmetric pattern. It looked pretty well perfect.
Narrator: With the Perseverance rover’s launch and landing now in the history books, the engineers are already planning the next big Mars mission.
Swati Mohan: Perseverance was the first leg of Mars Sample Return. So the next challenge is to get the samples that Perseverance finds and collects, and bring those samples back to Earth. So the next mission will have to not just land safely on Mars, like Perseverance did, but it actually has to land exactly where the samples are in order to retrieve them. So it’s the first mission to have to do pinpoint landing on Mars.
[52:01] So what Perseverance did was akin to, we targeted a big parking lot that was riddled with hazards, and Perseverance, on its own, found the parking spot where to land. We said you could park anywhere, just don’t run into anything when you park. But what the sample retrieval lander will need to do is you’re going back to that same parking lot, but you’re only allowed to park in this spot.
And then comes the big task of launching a rocket off the surface of another planet – which we’ve never done – in order to get the samples from the surface of Mars into orbit so that a third mission can come collect those samples in space, and then turn around and come home, and drop those samples through the Earth entry, descent and landing.
Al Chen:It’s hard to know where the biggest miracles are going to be required. This is going to be the biggest thing that we’ve done here, I think, and the most complex thing. It’s definitely a relay race, right, we can drop that baton pretty much at any point here.
[53:05](music)
Narrator:One of the trickiest parts of the mission may be when a spacecraft orbiting Mars grabs the baton – the capsule holding all of Perseverance’s rock samples – after it launches off of Mars.
Al Chen:The sample canister is pretty small; it’s a little bit bigger than a basketball. So we’re trying to pick out something really small in space around Mars. That’s, as far as I know, never been done before.
We’re only taking a handful of samples – a kilogram of samples or so. We want to keep that orbiting sample canister as light as possible. The rocket that’s launching it has a beacon on the upper stage, basically saying that it’s alive, look for me here. After that, the Earth-return orbiter has to find the orbiting sample canister based on where we think it is, and then actually trying to see it.
Just last week we were talking about what paint are we going to put on the sample canister so that we can see it with cameras from this orbiter going overhead? It’s going to be tricky. There’s a lot of pieces of this that I hadn’t even considered as problems that are going to be challenges. One of the things we’re working on right now is, how bright are the clouds on Mars? Those clouds on Mars can cause stray light that make it hard for us to see this sample canister that has our samples in it.
[54:15] Narrator: The timing, as in any race, will be one of the biggest factors for success.
Al Chen: We want to launch everything by 2028 or so, at least on the way to Mars. We do want to arrive at the right time of year to give us enough time on Mars to finish the operations of getting the tubes from wherever they are onto that rocket, and getting that rocket off the ground before it gets too cold to launch.
We also want to launch before dust storm season starts on Mars. That’s another big part of this, too, for multiple reasons. The lander that is keeping the rocket warm is solar powered. Regional dust storms and local dust storms can happen pretty much whenever, but planet encircling-dust storms, they happen roughly one in every three Mars years. We want to stay out of that to make sure anything that’s solar powered can handle it, and that we don’t run out of power.
[55:04] And more than that, some of the things that we’ve added, like Terrain Relative Navigation where we’re taking pictures of the ground, well, if you can’t see the ground, you can’t use those pictures, right, to figure out where you are. So we definitely don’t want to land in dust storm season with that either. And the dust itself can change the structure of the atmosphere such that if you were expecting a certain wind profile and density profile on your way down, you’ll get a different one, which may mean that you’ll end up in a different place than you intended.
I like to think of EDL as a string of things that have to go right. Now, magnify that by the fact that it’s one EDL at Mars, one EDL at Earth, then we have to launch off of Mars and do this rendezvous-in-orbit stuff. So we have to get to the ground on time, to make sure that the race we run on the ground can be run before we run out of time.
We might be a little crazy.
Narrator: We’re “On a Mission,” a podcast of NASA’s Jet Propulsion Laboratory. If you like this episode, please follow and rate us on your favorite podcast platform, And be sure to check out NASA’s other podcasts: they can all be found at NASA dot gov, forward slash, podcasts.
(Episode length = 56:17)