


















![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)










From Earth orbit to the Moon and Mars, explore the world of human spaceflight with NASA each week on the official podcast of the Johnson Space Center in Houston, Texas. Listen to in-depth conversations with the astronauts, scientists and engineers who make it possible.
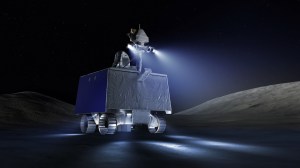
On episode 328, learn more about NASA’s first robotic lunar rover, the Volatiles Investigating Polar Exploration Rover, also known as VIPER, and its journey to the lunar surface. This episode was recorded on November 7, 2023.
![]()
Transcript
Host (Leah Cheshier): Houston, we have a podcast! Welcome to the official podcast of the NASA Johnson Space Center, Episode 328, “VIPER.” I’m Leah Cheshier and I’ll be your host today. On this podcast, we bring in the experts, scientists, engineers, and astronauts, all to let you know what’s going on in the world of human spaceflight and more. NASA’s Artemis program has ushered in a new era of lunar exploration, with an overarching goal of building sustainable presence on and around the Moon. As part of the Artemis program, NASA’s Volatiles Investigating Polar Exploration Rover, also known as VIPER, will make a journey to the Moon to search for ice and other potential resources on a 100-day mission. VIPER is NASA’s first robotic lunar rover.
Daniel Andrews is the project manager for VIPER at NASA’s Ames Research Center in California’s Silicon Valley. For over 30 years, Dan has managed projects at NASA, designing and developing technological innovations, focusing on everything from autonomous robots to underwater treadmills that simulate microgravity. Dan also led the Lunar Crater Observation and Sensing Satellite, also known as the LCROSS mission, that confirmed the presence of water ice at the Moon’s South Pole, paving the way for the VIPER mission. Today, he’s here to fill us in on VIPER, and its one-of-a-kind mission. Let’s get started.
[Music]
Host: Alright. Dan Andrews, thank you so much for coming on Houston We Have a Podcast today.
Dan Andrews: Happy to be here.
Host: We really appreciate you coming out from Ames to be here with us at Johnson Space Center. And before we start talking about VIPER, I want to talk a little bit about you. So you have your bachelor’s degree in electrical and electronics engineering from San Jose State University, your master’s degree in mechanical engineering at Stanford University. So what made you choose those paths? What was the first glimmer of NASA for you?
Dan Andrews: You know, it’s kind of a funny story. I didn’t aspire to work for NASA. Circumstances played out that I ended up here and have spent my entire career here. So it’s pretty interesting. Going to school in the Silicon Valley, thought I would work for a Silicon Valley, you know, tech startup. That’s what you do, especially as an electrical engineer. And when I was in my senior year, one of my professors came up to me and said NASA’s Ames Research Center was looking for a good controls engineer. And this was my controls engineering professor, who, by the way, I was getting a B in the class, not his best student, but I was in there because in his office hours, I found the material fascinating. And that got me the interview and the rest is history, right?
I went through the interview and they selected me. And that was a wonderful little, you know, lightning bolt that we all have in our careers. And then once I was at NASA Ames, about a year after I got there, I competed for full-time graduate study opportunity, and as a robotic-centered person crossing over into mechanical engineering for my graduate studies after being an electrical engineer for my bachelor’s level was a really obvious great thing to do because it gives me sort of harmonious balance between electrical and mechanical. And it’s been fantastic.
Host: So what year was that? When did you start with NASA?
Dan Andrews: It would’ve been ‘87, 1987.
Host: Okay. So a long tenure here.
Dan Andrews: Long time. This is my 35th year. Never would’ve guessed that would happen.
Host: Well, people sometimes come and stay. There’s no place like it. So you’re the VIPER mission manager now. Can you talk a little bit more about your previous roles leading up to this?

Dan Andrews: So part of the reason I have been with NASA so long is every time I found myself growing out of a certain capability, there was a new opportunity there. And I have worked on everything from snake-bots to floating astronaut assistant robots to airfoil wing flippers that allowed people to study unsteady lift dynamics across a wing that could completely change the aviation industry, to LCROSS, which was my first large mission that I managed, which discovered water on the Moon, actually touched the water ice, which then fed into Resource Prospector, which was a pathfinder to VIPER. VIPER’s just this natural follow on to the discovery of water ice, you know, LCROSS hits the Moon on purpose, kicks up all this ice, we confirm it’s ice, we fly through it, and you’re like, yes, it actually is water ice. Now we have 20 other questions, if not 200, right? Where is it? What concentrations? How deep is it? What’s its lateral distribution? Is it chunky? Is it spread evenly? So all these natural things came out of that pathway that led me to VIPER now.
Host: All of these projects sound like what you imagine when you envision the future.
Dan Andrews: Yeah.
Host: Snake-bots and floating astronaut assistance and things like that. So that’s a very fascinating career path. And they’ve all really built up to working on VIPER. So starting to dive into VIPER, the Volatiles Investigating Polar Exploration Rover, can you break down the title for us exactly what this means when we look at VIPER as a whole?
Dan Andrews: Well, you’ll never guess, but we started with the name and then made everything else work out for the acronym But it’s a pretty good acronym too though, because it’s accurate. What this mission is about is, okay, LCROSS and other missions have confirmed the presence of water ice. Now we need to go map where it is. And so you’re not going to do that from orbit. I mean, you can, but you’re not really confirming it’s there. What you need is something that’s roving around on the surface, and it has to be big enough that you can cover enough territory, enough space to be able to truly characterize the nature of the water ice. And so that’s how VIPER came to be.
“Volatiles Investigating.” That means we’re looking for volatiles, in particular water-based volatiles, but other volatiles too. Volatiles Investigation Polar Exploration Rover, “Polar Exploration” meaning we’re on one or the other Poles, North or South Pole. They would both work, by the way. But because South Pole is where all the intended human action is, including Artemis, it just makes sense that we go there. But technically you could get very similar answers on the North Pole, too. And then I think “Rover” is self-explanatory. So it’s actually an excellent acronym.
Host: I agree. You talked about Artemis a little bit and going to the South Pole of the Moon, that’s where we want to land the crew. Is this the first time that we have landed a rover on the South Pole of the Moon?
Dan Andrews: It is. Nothing has really been on the true South Pole of the Moon. Even some recent missions have kind of gone southward, I would call them. But there’s a big difference between being within five or 10 degrees of the true pole and then being up a little higher, more equatorial than that, because the nature of the volatiles and the lighting conditions are fundamentally different. What LCROSS did, the earlier mission that I was referring to, was it impacted into a permanently shadowed region. And what that is, as the name would imply, an area where the Sun never shines into that region. And it’s because it’s tangentially located at a pole. So the Sun’s hitting the face of the Moon and hitting all sides of the Moon, but it kind of shoots over the top and bottom of the polar regions. Well, if there’s no sunlight getting in there, there’s no energy getting in there. And so whatever volatiles are in there are probably trapped. That was the premise for LCROSS. Maybe there’s water ice trapped there. So we’ve confirmed that’s the case. Great. Now we want to go there with a rover, but strangely enough, it’s just as interesting to see what the water ice is like, or if it’s even present outside of permanently shadowed regions, because those permanently shallow regions are cold, like 40 degrees Kelvin, like -400 degrees Fahrenheit, and no one or no thing wants to be in there. What if you could harvest water ice somewhere else, like near a PSR? So VIPER’s going to try to answer all those questions. We’ve broken the problem space into four pieces, and we’re going to go to four types, you know, regional types, and we’re going to go to all four types multiple times and see what we learn. We might be surprised, who knows.

Host: So when we talk about VIPER, I want to paint a picture for our listeners of what VIPER looks like. So VIPER is about a thousand pounds, is that correct? It is battery powered, uses solar power. It communicates through the Deep Space Network. Can you expand on that for us?
Dan Andrews: So what’s interesting is VIPER would ideally communicate with an orbiting satellite around the Moon, but no such thing exists yet. It won’t be long I think before there will be a string of satellites and communications will be as simple as satellite communications are here on Earth, but not yet. So that becomes a very strong constraint for VIPER. We have to be able to communicate directly back to Earth, which means we need line of sight back to Earth, which means as we’re going into permanently shattered regions and other areas that maybe have mountains nearby, we could lose connection with the Earth, which is a problem. So we actually have to design our surface traverse to make sure that doesn’t happen. And that’s an added constraint, right? But yeah, we communicate back to Earth directly. Another interesting side effect of this is that Earth sets relative to the region we’re in on the Moon every month for about two weeks. So even though the Sun is shining on our backs, the power’s looking good on the rover, our batteries are fully charged, we’re at great temperatures, because we cannot see Earth from the Moon, it has to sit there and park until Earth rises again relative to that location. So it means over the course of a month, which is one lunar day, over the course of a month, we’re operating maybe half of that, and the other half the rover’s sitting up there attentively waiting for Earth to come back. So I’m torn in that because that’s another half month we could have been getting great data, but it also gives us those two or so weeks to process what we learned in the first two weeks, change our path, go back, redouble our effort in this area. Boy, that was sure a surprise, wasn’t it? Just think it all through and then go hit it again in the next month for another two weeks or so.
Host: Yeah, that’s true. I like that idea of the time to replan. That’s definitely a positive. And there are things that you don’t have to worry about with VIPER that you have to worry about with some of our Martian rovers. We don’t have dust storms on the Moon, you know, so we don’t really have that concern of solar panels getting covered. What are some other differences between the rovers that we’re used to seeing on Mars and VIPER?
Dan Andrews: What’s interesting about the comparison with Mars rovers is that it cuts both ways. There are also things about operating on the Moon that are much harder than on Mars. And if you go onto YouTube and look at any of the videos that we’ve put out on VIPER, it looks very strange, very not Mars rover-like. It has four wheels instead of six. It’s tall. Where the solar arrays are and where the radiators are, are backwards from where you would have them on a Mars roving mission. All these things lead to a lot of questions. What were they thinking?
Well, first of all, the solar arrays have to be on the sides of the rover, not on the top because the Sun is not overhead. You’re in a polar region. The Sun never gets above 10 or 11 degrees off the horizon, high noon on the South Pole is a Sun that’s about 11 degrees off the horizon, and then it only goes down from there. And so the solar arrays need to be pointing to that reality. And then the radiators where you get rid of your excess heat, they have to be on top, which would be absolutely the wrong thing to do for a Mars rover. But in the case of a lunar rover with no atmosphere, the darkest part of the sky, if you will, is straight overhead. And so that’s how you get rid of your excess heat.
We have four wheels instead of six. We have to be able to move in all directions at any time. So we can get this, literally move in one direction by orienting our wheels, while separately be tracking the solar arrays on the Sun, independent of our movement, while separately pointing our antennas back to Earth to do the direct-to-Earth comms. Three separate degrees of freedom that we’re controlling all at once while we’re moving across the surface. I mean, it’s crazy how complicated that is, but that’s how you get everything to work with the current infrastructure that we have in place.
Host: That’s very cool. So another thing that makes VIPER different than some of our previous rovers and landers is the commercial aspect that is coming to the table this time. You know, we’re seeing a lot of commercialization in low Earth orbit and we need our partners to help us explore further. So can you tell us some more about the commercial partnerships that we have that are enabling this mission?
Dan Andrews: You know, it’s interesting. The approach that we take out at NASA Ames, where this mission is run, is very different than traditional NASA projects in that we try to leverage what’s commercially available routinely on the LCROSS mission. We had nine or more instruments on there and half of them were commercially available instruments from NASCAR, from carpet fiber recycling companies, and we just ruggedized them for use on the Moon. So something that looks at a NASCAR engine block temperature allowed us to see the impact temperature of LCROSS hitting the Moon, right? It’s fascinating and it’s huge leverage for NASA. We’re doing the same thing on VIPER to as much a degree as we can. And that includes this whole new construct of Commercial Lunar Payload Services or CLPS. While I don’t manage that, I just provide a payload into a CLPS-provided contract.
Astrobotic was competitively selected to be our ride to the Moon. And that’s different in and of itself, but it’s even more unusual than you might at first think. NASA’s very much used to acquiring launch vehicles to take our stuff off of Earth. This is taking that and going a step further. We still need a launch vehicle to take us off of Earth, then we need a vehicle to deliver us to the Moon, then we need a vehicle to land us on the Moon. Then we go rolling off. So in a way, the NASA part of the mission begins after we’ve rolled off and as we’re rolling off. All of that other stuff I described is provided commercially. And this is a big bet on the commercial world, U.S. commercial industry, that they could provide that. So in the case of our ride to the Moon, NASA actually doesn’t have any say in who the launch vehicle provider will be. That’s the business of the CLPS partner. And so they go through whatever negotiating processes they want, they made their selections in the case of VIPER, it’s going on a Falcon Heavy from SpaceX. But that was their decision. They’ve got to make sure it’s going to meet the needs of VIPER, both through launch, in transit and down to the surface. Very, very interesting and yet another interesting facet of this mission.
Host: Yeah, it is really interesting when you think about the whole new commercial availabilities and platforms that there are now that we didn’t have when we first started exploring the Moon. So I’m excited to see this new world of opportunities opening up in that way. I want to talk about the mission. I can only imagine how exciting this is. So starting on launch day, where will you be and what does launch look like?
Dan Andrews: So starting on launch day itself is an interesting question for where I will be, because this is actually a commercial launch. Now I’ll be at the Cape and I’ll be somewhere providing assurance that the VIPER mission’s good to go, but it probably won’t look like a traditional NASA mission where in the past, like when we did LCROSS, I’m sitting there right in launch command room and we are making our decisions about “go, “no go.” I think it’ll look a little different. So stay tuned on that.
But we very quickly get to the Moon, establish a lunar orbit. This is all done by a CLPS partner, and then drop down somewhere between, depending on the launch date, two and five days later, down to the surface. And there we sit, let’s presume a good safe landing. We release ourselves from the lander, drive down, we’re already practicing driving down ramps that are analogous to what will be on this lander drive down. And then immediately, like within our requirements, I believe are the first six hours, get off and go. And the reason is Sun is already moving. We don’t have the luxury to wait for this. So that is like no other robotic mission. All the other mission, Mars missions, they have a giant commissioning period, plus they have your communications delay. So everything is batch-oriented, no such luxury for us. We’ve got to get going and in fact, we’ve got to get away from the lander because we just don’t know what might happen with the lander sitting there in the heat and so forth. And the local area’s probably been contaminated from the landing process. So there’s probably not good science for us there. So we’ve got to giddy up, get out of there, and go start our mission, which is all part of our traverse plan.
Host: That’s true. And I’m thinking about launch now. You know, when we go to Mars with a rover, we have a very small window for when we can launch. Is that the same, even though the Moon is much closer? Do we have this very short window of when we can send VIPER?
Dan Andrews: We actually have some flexibility on the launch date because the way that the CLPS partner planned their insertion to the Moon was not a direct inject where you go in and you immediately land. Instead their plan includes establishing orbit around the Moon, which means you can drop out of orbit when you wish and hit that location that that aims that VIPER needs to start the mission on whatever day you wish. So there is some flexibility there, but if you get outside that four to five day window, you’re now going to miss that period of lighting and Earth visibility and you’ve got to jump out a month and start it again. And you may or may not be able to land in the same place because now that you’re starting a month later, you might need to change your traverse plan, which means you probably need to land in a slightly different place. And then most concerning of all is if you have too many of those delays, the backend isn’t moving, the whole area’s going to go into darkness after that five-ish month period that I described. So your mission is getting shorter and shorter with each monthly delay. So you’re motivated to get there at what we call the opening of the season, lighting season, for that five month period.
Host: And then once you get there, it’s a 100-day mission.

Dan Andrews: If you get there at the beginning of the window, it’ll be a hundred plus days. But if you get delayed by those months, the overall mission duration goes down correspondingly, because again, the backend of the mission is the back end, right? The whole area goes dark. So you’re done.
Host: That is the eventual end when the solar panels just can’t be charged anymore. It’s dark.
Dan Andrews: Exactly. And that’s led to a really interesting debate about what should the end of the VIPER mission look like. Now, that’s probably going to be a function of how the mission went. You know, did you have a good go of it? Did you have a bad go of it? Was it rough? One line of logic is, well you should try to park VIPER up in a sunny, easily accessible, recoverable areas so that next year, maybe someone or something can go get it. We don’t need that to answer our questions. So is the better answer that on our final lunar excursion of the last day, that we just go deep into a permanently shadowed region where we have no hope of ever coming back “Thelma and Louise” style, right? Just go and then we still need to be able to communicate with Earth. If you don’t, then it’s just waste. But we still need to be able to send the information back to Earth and be able to control the rover. But you’re so deep in you wouldn’t come out even if there was sunlight. But wouldn’t that be interesting to get into areas that you no longer have to worry about getting back out? Are they different? Are they rich with water ice? So we haven’t finalized that yet, but it’s an interesting dilemma. What are you really trying to get out of the end of the VIPER mission? So still being discussed.
Host: So the middle of the VIPER mission, to rewind a little bit, VIPER travels about half a mile an hour. About how many miles are you thinking that the rover will take during its mission?
Dan Andrews: The way we try to look at that is in the best case scenario, and then we’ll just let the hand play out. We have no requirement for distance. It’s all about characterizing those four, what we call ice stability regions, and characterize them with sufficient data that it’s statistically representative of those regions anywhere else too, like on even the North Pole. So that’s the requirement to hit those. But depending on the traverse plan, we’re always optimizing it. So we’ll see how pro-ductive we are against the surface or along the surface.
But that half mile per hour, I just wanted to touch on that one a little bit cause that one always brings a smile to my face. That sounds pretty slow to me, half mile an hour. But the funny thing is that’s speedy compared to most extraterrestrial rovers, right? Mars rovers, about a fifth that speed. Now the Lunar buggy that carried humans across the surface and all that’s cheating, cause that had a whole different purpose in a half mile an hour. Wasn’t going to work very good for humans, but putting the human aside, as far as a robotic rover, we’re going pretty quick. And again, it goes back to that sunlight condition. If we move too slow, shadow will catch up to us. And while we can tolerate shadow, we have batteries, the whole landscape of that testing area could vanish on us and Earth goes out of view. And we can’t go get in a sunny spot and stay warm. That could be end of mission. So we need to be “fast” for a rover. And so that’s where that half mile an hour comes in.
Host: So how do you think what we will learn helps us prepare for future missions, whether they be future robotic exploration or future Artemis missions with crew members?

Dan Andrews: I think the way I think of that question is twofold. The first one is the basic tenet for VIPER, which is to understand the mapping, you know, nature of volatiles on the Moon. So that’s our goal. We have full and minimum success criteria all about trying to achieve that goal. There is another angle on it though, which is that sending a robotic scout in advance of humans going there has always proven to be valuable, even if it’s not about the water question. Even if you put that aside, the nature of what the soil’s like on the South Pole region, we have a pretty good idea from Apollo what it was like in equatorial regions. Is it similar? Is it different because of the nature of the shadows? Are the electrostatics better or worse? How crushable is it? Can you navigate it? Okay, what about the temperatures? What about the lighting conditions? What does that do to electrostatics? The part of the rover in the Sun, part of the rover in the shade could have a huge temperature difference across the rover just from solar energy. What does that do? If you’re a human, if you’re an Artemis astronaut and your goal is to get there and explore as one of the early human explorers, man, you really want to know what VIPER experienced there in this similar region beforehand. So, independent from the mapping function just as a pre-human scout, it’s incredibly important.
Then just to step out to the big question, which is what motivates me? VIPER could literally be the starting point for all of civilization on the Moon, whatever that ends up looking like because you’re not going to be able to keep bringing all your resources from Earth. It’s too expensive. It’s too logistically complicated. If you could live off the Moon with the water that you’re able to extract from the Moon directly, oxygen that you could pull from that hydrogen that you could pull from that oxygen, hydrogen, or rocket fuel, now you can refuel, you could have propellant depots around the Moon all coming from the Moon, oxygen, debris, water to manufacture. Now you’re making habitats. Throw down some energy sources. You turn the sand to glass, now you’re making glass domes. You fill it with the water, you harvest. Water’s a great insulator for radiation protection, just on and on. And it all starts with first LCROSS. Yep, it’s water ice. Second, VIPER, here’s where to find it, and here’s where the concentrations are, and then just let the rest of the story write.
Host: It sounds like you’re ready to plan the first residential area on the Moon.
Dan Andrews: Not live there, but definitely take those next steps.
Host: I’ll go. So, you know, based on LCROSS, do you have any expectations of what VIPER might find or where? Do you have things that you are more expectant of than others?
Dan Andrews: What I like about VIPER is its robustness because we on Earth, we science community on Earth, think we have an idea of where the water is ice is and why we have an amazing ability to take data from not only LCROSS, but that workhorse, LRO, Lunar Reconnaissance Orbiter and other international missions and pull all sorts of interesting conclusions from it. The problem is none of those are ground truth in what’s really going on. VIPER’s designed to find the truth, whether it matches our data or not. And that’s the best kind of scientific experiment. We may think of those four ice stability regions that we know, which are going to be the most lucrative, which will have the best, what’s called “ore grade opportunity.” Which is not unlike looking for natural resources on Earth, right? It isn’t always the place where they’re most plentiful. That’s the best place or most economical place to go. It could be where maybe it’s less plentiful, but easier to get at, and that’s a better solution. All of that same logic has to be brought to the Moon. And no matter what we think VIPER’s going to tell you the truth. It isn’t what you thought. And that’s awesome because it’s going to be valuable no matter what, whether we’re surprised or not.
Host: Let’s talk lessons learned. We’ve had a lot of success from our Martian rovers over the last several years. What are some of the things that we’ve learned from those rovers, from those missions, that we’ve been able to incorporate on an entirely new mission to an entirely different planetary body?
Dan Andrews: That’s a really great question because the starting point is it’s a very different destination. So you have to be selective with your learning. That said, the Mars roving campaign is nothing short of astonishing. It’s incredibly impressive and robust and all towards all kinds of learning that could happen there and has happened. We have in the planning for VIPER and Resource Prospector before it, we’ve been in many, many conversations with those experts. We even have some of them on the team, on the VIPER team, but you might be surprised just how much of our planning goes back, even further to Apollo and other lunar activities, because the environment is just so different. So, we’re pulling from all places that are relevant to the VIPER mission in a lunar context. We’re much closer to Earth, so communications delays are much, much smaller.
So we look a lot more real time than anyone who’s ever worked a Mars rover mission. So that’s an example of where it’s not especially relevant, right? We actually can go more quickly, but we can’t go real time, real time meaning we can’t joystick the rover around. You could do that in low Earth orbit cause the delays are small enough. So joy sticking a little mini rover around on the space station, say, but not on the Moon. So we have these adjustable levels of autonomy where we can kind of carry it and stick the rover along, but then it has to autonomously move each of those steps. So it’s kind of this quasi middle step, but you learn from what it’s like to pre-plan and program things. All La Mars missions, you learn all low Earth orbit, small set type missions, how to react in real time. We are 24/7 during those periods where Earth is in view, then we’re probably 24/7 planning for the next, you know, window when Earth comes back. It’s just—it’s very different. And I guess the too-late-to-be-short answer is that we’re grabbing all the stuff, all the knowledge from all the places that exist and applying it where appropriate on VIPER.
Host: I’m glad you mentioned the 24/7 support that you’ll expect or that you will have when we are in communication with the spacecraft. I would love to hear more about the team. So who’s monitoring the mission? What kind of controllers do you have? How do they even train for something like this? I would just love to hear all about what that support looks like in the planning phases, but obviously, while the rover is in communication with the Earth.

Dan Andrews: Yeah, it’s a great question. And it’s been one we’ve been thinking about for a number of years. So mission operations center, the command and control centers at NASA Ames, and we have a multi-mission operations center there. We have a remote group out here at Johnson who are experts in the rover design. The way the rover is being designed and built is NASA Johnson is designing the physicality of the rover, the mechanisms and the thermal systems and all that. NASA Ames doing all the rover flight software and hazard avoidance and fault detection. So we got brain and body happening in two places, which obviously we have to bring together for test. And that includes during operations. And so we have already run, at this recording time now, I think five different simulations with everyone sitting in their control rooms and working over voice loops and doing all that already.
We started that when we’re more than a year out. And it’s for all the reasons that you’re inferring, which is so much has to go right, 24/7, three shifts with overlapping shifts across a very sophisticated rover in a very inhospitable location. We haven’t even gotten to contingencies really yet in our simulations. We’re just simulating everything going well. And then a control station will go out or someone will forget a protocol over here and all that. That’s all part of the maturation process now, right now we’re doing it during daylight hours cause we’re training and we’re getting the software bugs all worked out. And that’s been incredibly fruitful. When we get further into it, we start running truly operational simulations, right? And that will be not unfamiliar to NASA Johnson environments where you are literally mimicking day of week, hour of day. So if this is something that’s going to happen at 2:00 a.m., you’re simulating it happening at 2:00 a.m., you’re simulating people who are at home three hours before, getting into work to support a 2:00 a.m. activity. Just everything about it. We don’t do that first though. First, you’re just trying to make sure you know what to do and how to react. And then of course, at the very end you start throwing sticks in spokes, right? You start trying to trip up the team, you make a control center drop, you lose DSN, you create a rover fault and just test the team and how they do and that environment all to get into fighting shape for when you’re really on mission.
Host: Speaking of testing, not just simulations, but I would like to know more about the testing of the rover itself. So is it going to any other NASA centers for vibration table or thermal testing, anything like that?
Dan Andrews: Yeah, so far we’ve hit three different centers. NASA Johnson, NASA Ames, and also NASA Glenn up in Ohio. NASA Glenn has a really good soil mechanics series of test bed. It’s not even one. And some of our best videos of VIPER, of our engineering unit VIPER, come from NASA Glenn because they have a slope table, which is literally a table with regular simulant that can go up at different angles. And it isn’t about us trying to understand when we slip. It’s us forcing ourselves to slip and see if our algorithms can detect accurately are slippage, right? Cause we’re going to be going down a hill the wrong direction when we’re in a deeper crater, right? We just need to know how we’re going to detect that. But my favorite videos that come out of that, which carry real mission implications, and we kind of backed into was they have a sink tank there at NASA Glenn, and it’s not filled with lunar regolith simulant. It’s filled with something much worse. It’s filled with these little micro spheres. That is not what lunar regolith looks like. Lunar regolith is very sharp because of all the soil, right? What do they call it? Impact gardening that’s going on. So it actually can latch together pretty well and it’s thought-unproven, but it’s thought that it’ll actually, after a little crush, actually settle and become a very stable surface from which you can locomote that you could push across. But what if we’re wrong in a permanently shadowed region where no thermal settlings happened in that PSR? We’re just going to sink and call it a day. So we go to this sink tank at Glenn, and these spherical beads, as you can imagine, do not stick to each other. They just flow past each other. So it’s a click the best thing you can imagine to like a quicksand.
So we took the rover and we started roving across it and sure enough, like every rover that goes in there, it sank to its belly. So it fell to its belly. Now it’s just spinning wheels. But because of the way we designed the locomotion system, right, with the articulating shoulder joints and ways that we can move the wheels, we could turn the wheel sideways and actually crawl. The rover can crawl its way, or swim, depending on what metaphor you want to use out of that, and lift itself right back up onto the top of the surface by pulling instead of expecting to have traction. So it’ll do you know, of my body, my right hand and my left foot. Those two are pulling and the left hand and the right foot are acting stationary to be a point by which they can pull and you alternate left, right, left, right. They have three or four different gaits that we’ve honestly invented after seeing what our rover can do. All of them pull us out of a “sunk to our belly” condition that we hope to never have. But if we do, that’s in our bag of tricks. And it just looks cool.

Host: It sounds incredible.
[Laughs]
Dan Andrews: Like nothing you’ve ever seen before. It’s bizarre.
Host: I mean, you have to think of everything, obviously, that can go wrong, but that is just paradigm. Incredibly impressive.
Dan Andrews: It’s paradigm shift. Paradigm shift in thinking about how you rove. Now we want to rove, we want to roll because that’s the fastest way to go. What I just described is not fast. But if it’s choice between not fast and game over. So we’ll go slow and we’ll get out of that pickle and then we will start rolling as soon as we can.
Another thing we could do is we’re going into a PSR. If we find, and we think this is unlikely, but if we’re wrong, if we go into a PSR and I’ll just say dip a toe into it, meaning one of the wheels into an area, and we find that we sink, our rover has the ability to actually change its center of gravity and lean back on itself by pushing the other wheels up, rocking back and pulling that sunk wheel out, roving away on three wheels and then putting the wheel back down and saying, “Alright, what’s plan B?” The whole game in this area that no human or rover has been to before is be able to accommodate what we can’t possibly know before we’re there. So as an engineer, I want to design things as simple as possible. Not as complicated, because complexity equals problems. But if you make it overly simple and you go to a very complicated area, it could be game over really quickly. So there’s a very difficult trade you have to make between complexity, which could be your friend, and complexity that could be your enemy. Simplicity, which could be your friend, or simplicity, which could be your enemy. And where is the right answer?
Early on, we actually brought, you know, a community of worldwide lunar scientists together. And the idea was let’s get our best brains around this and hear what they think a permanently, shadowed region might be like. And as you’re probably not surprised to hear, there was the camp who said, “It’s going to be the downest, fluffiest soil. You’re just going to sink like a beanbag chair when it’s got a leak. You’re just going to sink into that thing.” And then the other community said, “It’s so cold there, no matter how dense it is, everything’s going to be frozen like cement and you’re going to skate across the surface.” Now, how are VIPER engineers supposed to design for somewhere between a leaking beanbag chair and an ice rink? Well, you can’t. So what you do is you just come up with all these contingencies that you could pull out of your bag of tricks if you need them. So that’s what we’ve done.
Host: When I hear these things that you’re planning for and the new technologies that are incorporated here, I can’t help but think about potential future NASA spinoffs and ways that this technology can be used on Earth. Specifically, I’m thinking when you talk about slippage, you know, you put a rover on a slant or slope and it’s able to detect and stop itself. You know, I think we have some of that in automobiles today, but in the future, there may be even technology based on what’s being worked on here that we can carry into the future too.
Dan Andrews: Oh, I think that’s absolutely true. And as you alluded to, that’s not surprising for NASA, right? NASA goes and solves its very specific mission-oriented problems and addresses its risk. And then some smart commercial people come along and go, “You know, I could use that in a very more pedestrian, terrestrial purpose and it’ll solve this problem.” I think there’s a lot of opportunity for that with what VIPER’s doing. I also think though, that in the coming world of neural based learning, artificial intelligence and so forth, I think a lot of this learning will be less brute force and measurable and designable as we are doing with VIPER. And instead, just be a learned activity where you put these rovers in various environments and let the rover learn for itself. That’s what’s next. We’re not quite there yet, and so we have to be envisioning all the possibilities for it and then getting as smart as we reasonably can with the time and budget that we have.
Host: I think what’s most exciting for me when I think about this mission is the fact that when we have VIPER there, there is no doubt that we will learn something that we did not know before.
Dan Andrews: Absolutely.
Host: And so what’s the most exciting part for you? What are you most hopeful for or excited about?
Dan Andrews: I think VIPER, the thing that excites me so much about that, besides just the amazing opportunity that this team has to work on something so significant to humankind and the future is that future component. Whenever I’m at conferences and I’m giving talks on VIPER, especially international conferences, I get swarmed afterwards by people who have killer tech that could be used to harvest water, but their tech presumes a certain circumstance on the Moon, like the water’s only deep, right? Or the water ice is granular and it’s in the first five centimeters, right? Whatever their gadget is, right? They need to know what the truth is because their gadget could be the next best thing or dead on arrival. It’s of no purpose because that’s not how the water ice is located there. So everybody needs a VIPER to get the data to know what the next steps are as you move into scale, production, harvesting and so forth that would sustain, you know, humans permanently on the surface that are bringing everything from Earth. So it all starts here and that’s pretty exciting.
Host: Yeah, I think so. You know, that brings to mind, I think the core question in my mind, at least of what is in those permanently shadowed regions of the Moon and how can we use it. And that seems really simple, but once we learn, that it informs everything going forward.
Dan Andrews: Absolutely. And what if we find that it is not surprisingly very, a lot of water ice concentration, permanently shadowed, okay, that’s kind of what we figured, but it’s really hard to get in there and get out of there to harvest it, to send it out, to go break it. And oxygen, what if they find that there’s one quarter the concentration of water ice in these much more accessible areas so it’s not nearly as lucrative from a concentration point of view, but so easy to get, then you might not actually care what’s happening in the permanently shattered regions, at least from a resource utilization point of view. Lots of scientific relevance for sure, no matter what. But from a user point of view, that may be just not important. It’s much more important that we grab the stuff that’s at 10 centimeters or 20 centimeters.
Host: So we have, it sounds like goals, a lot of goals for VIPER. What does success look like in this mission? Is it the full 100 days? Is it finding something that we’ve not found before? What does success look like to you?
Dan Andrews: Strictly speaking, success looks like us fully understanding those four ice stability regions because we broke the problem up into those four pieces. So if you know those, you know everything, and you now can plan everything around that this might change where humans end up going, right? If there’s surprises, especially, and that’s why a mission that doesn’t presume you’re right with your initial expectations but has the ability to give you the truth whether you like it or not. That’s the most valuable part of this mission. Whether we’re surprised or not.
Host: Is there anything else that you want everyone to know about VIPER?
Dan Andrews: Watch for VIPER. VIPER’s going to be a lot of fun. We’re actually trying to set up a level of engagement with the public where you can actually monitor on your phone live feeds coming down from VIPER and actually geek out a little bit as it’s going on. So we’re really trying to take what’s already a pretty awesome mission and engage in levels that we never have before. And I think you’ll really enjoy it.
Host: Well, I was definitely excited before we chatted today, but even more so now. So I just want to thank you so much, Dan, and we will all be watching for VIPER.
Dan Andrews: My pleasure. Thank you for having me.
[Music]
Host: Thanks for sticking around. I hope you feel a little more enlightened about VIPER. Check nasa.gov for the latest, nasa.gov/podcasts and our social media accounts on Facebook, X, and Instagram. Use #AskNASA on your favorite platform to submit your idea and make sure to mention it’s for Houston We Have a Podcast. This episode was recorded November 7, 2023. Thanks to Will Flato, Dane Turner, Abby Graf, Jaden Jennings, Rachel Hoover, Dominique Crespo, and Gary Jordan. And of course, thanks again to Dan Andrews for taking the time to come on the show. Give us a rating and feedback on whatever platform you’re listening to us on, and tell us what you think of our podcast. We’ll be back next week.