






















Mobile Servicing System
Quick Facts
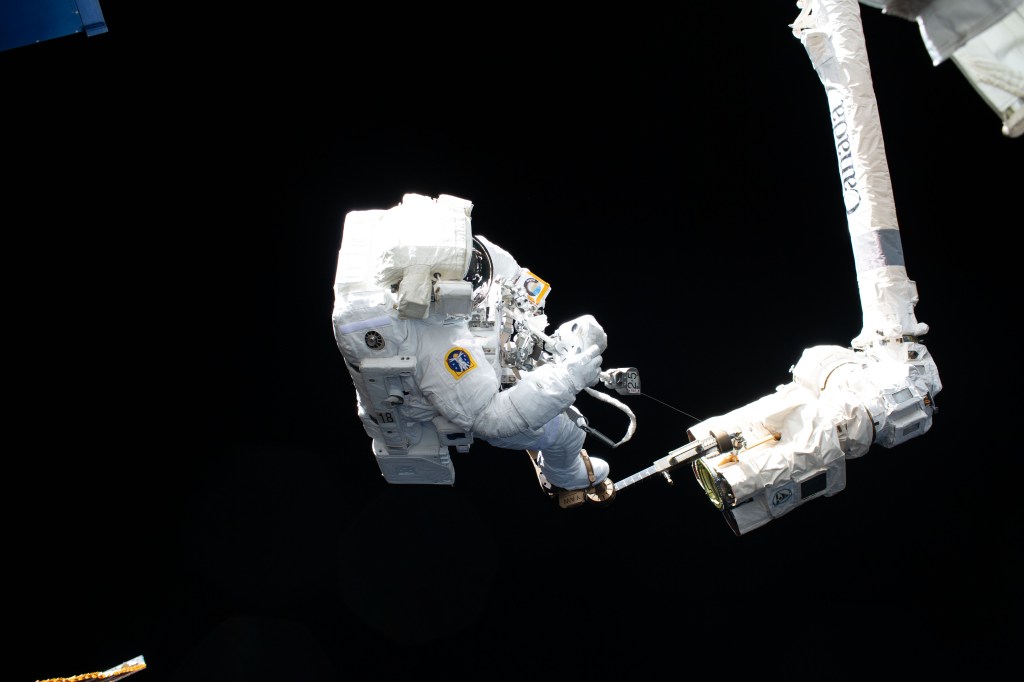
Astronaut Luca Parmitano rides the Canadarm2 robotic arm during a spacewalk on Jan. 25, 2020.
The Canadarm2 robotic arm guides Japan’s Kounotori cargo craft for installation on the orbital outpost on Aug. 24, 2015.

The Canadarm2 robotic arm maneuvers the Quest airlock for installation on the International Space Station on July 15, 2001.




The Special Purpose Dexterous Manipulator, also known as Dextre, performs robotic maintenance like changing batteries and replacing cameras outside the International Space Station. Dextre, a fine-tuned robotic hand, is equipped with lights, video equipment, a tool platform, and four tool holders. Dextre’s dual-arm design and precise handling capabilities reduces the need for spacewalks giving astronauts more time to conduct science. Dextre is operated by robotics controllers both at NASA’s Johnson Space Center in Houston and the Canadian Space Agency’s headquarters in Saint-Hubert.
Dextre
Mass: 3,664 pounds
Length: 11.4 feet
The Mobile Base System provides a movable work platform for the Canadarm2 and Dextre. It moves on the Mobile Transporter rail car along truss rails covering the length of the space station. It can traverse the main trusses to access any of eight worksites that feature power connections for the base and any of its attachments.
Mobile Base System
Mass: 3,196 pounds
Dimensions: 18.5 x 14.6 x 9.4 feet
Canadarm2 is part of the Canadian Space Agency’s contribution to the International Space Station. The 57.7-foot-long robotic arm was extensively involved in the assembly of the orbiting laboratory. Each end of Canadarm2 features an identical “hand,” known as a Latching End Effector (LEE). The LEEs contain cables that tighten to ensure a strong grip and allow the robotic arm to firmly grasp objects or latch itself to the station.
Canadarm2 can easily be commanded to move wherever it needs to go on the orbital outpost. Each of its ends can be used as an anchor point while the other carries out various tasks. The anchoring end must be secured to a power data grapple fixture. These fixtures are located at a number of key points on the station’s outer structure.
Canadarm2 Robotic Arm
Mass: 3,300 pounds
Length: 57.7 feet
Degrees of Freedom: 7
Mission Overview
Dextre
Launch: 3/11/08
Installation: 3/18/08
Mobile Base System
Launch: 6/5/02
Installation: 6/10/02
Canadarm2 Robotic Arm
Launch: 4/19/01
Installation: 4/22/01