NASA’s Space Technology Mission Directorate (STMD) develops technologies through a community of entrepreneurs, researchers, and innovators to solve the nation’s toughest challenges and enable future NASA and commercial missions to the Moon, Mars, and beyond. Each impact story summarizes an STMD-enabled technology’s complex journey from idea to use – illustrating how support from NASA drives innovation, development, demonstration, and commercialization of new technologies.
The Technology
Jezero Crater on Mars is full of hazards such as rocky hills and smaller craters, making it a challenge to land in – until NASA’s Mars 2020 mission with the agency’s Perseverance rover did just that with the help of improved navigation technology.
Terrain Relative Navigation (TRN), a technology developed by NASA, facilitates increased landing accuracy and helps spacecraft avoid surface hazards. It allows the exploration of other worlds, like Mars and various moons, in areas that were previously considered too difficult for the spacecraft to land. TRN uses a camera to correlate visible terrain features to onboard maps, calculating relative positions and altitudes during descent within seconds. Furthermore, TRN can autonomously navigate spacecraft away from medium to large hazards within a target landing zone to ensure a safe landing for a successful mission. Having proven the value of TRN’s precision landing capability, researchers are now combining TRN into several other entry, descent, and landing (EDL) and hazard detection technologies for missions to the Moon and beyond.
The Challenge
Scientists want to go to exciting places, not boring flat ones.
Michelle Munk
EDL Capability Lead and Acting Chief Architect and for the Space Technology Mission Directorate at NASA Headquarters
The highest science return is often in very challenging terrains for landing.
Andrew Johnson
Principal Robotics Systems Engineer at NASA’s Jet Propulsion Laboratory in Southern California
During the Apollo missions, astronauts looked out the windows of the spacecraft to identify landmarks to determine their estimated position and manually choose a landing spot away from hazards, such as craters, dunes, and rock fields. For safe and successful robotic and eventual crewed Mars missions, spacecraft require a more accurate and autonomous system.
A “high-precision” landing is one where the spacecraft can touch down within about 160 feet (50 meters) of its target. Before TRN, high-precision landing capabilities did not exist. Mars 2020 was the first robotic mission to Mars to use vision-based navigation for safe and precise landing. In previous rover missions, location was estimated through data provided by the Deep Space Network, NASA’s international array of giant radio antennas, with an estimated error of up to nearly 1.25 miles (2 kilometers). Harsher terrain – like that found within Jezero Crater on Mars – provides opportunities for diverse geological sampling, so missions without high-precision landing capabilities must choose safer landing sites over sites with potential for enlightening discoveries.
The Advantage
“If we didn’t have TRN, the probability of landing safely at Jezero Crater was about 80 to 85%. With TRN, the probability increased to 99%.” – Swati Mohan, guidance, navigation, and control operations lead for NASA’s Perseverance rover at JPL.
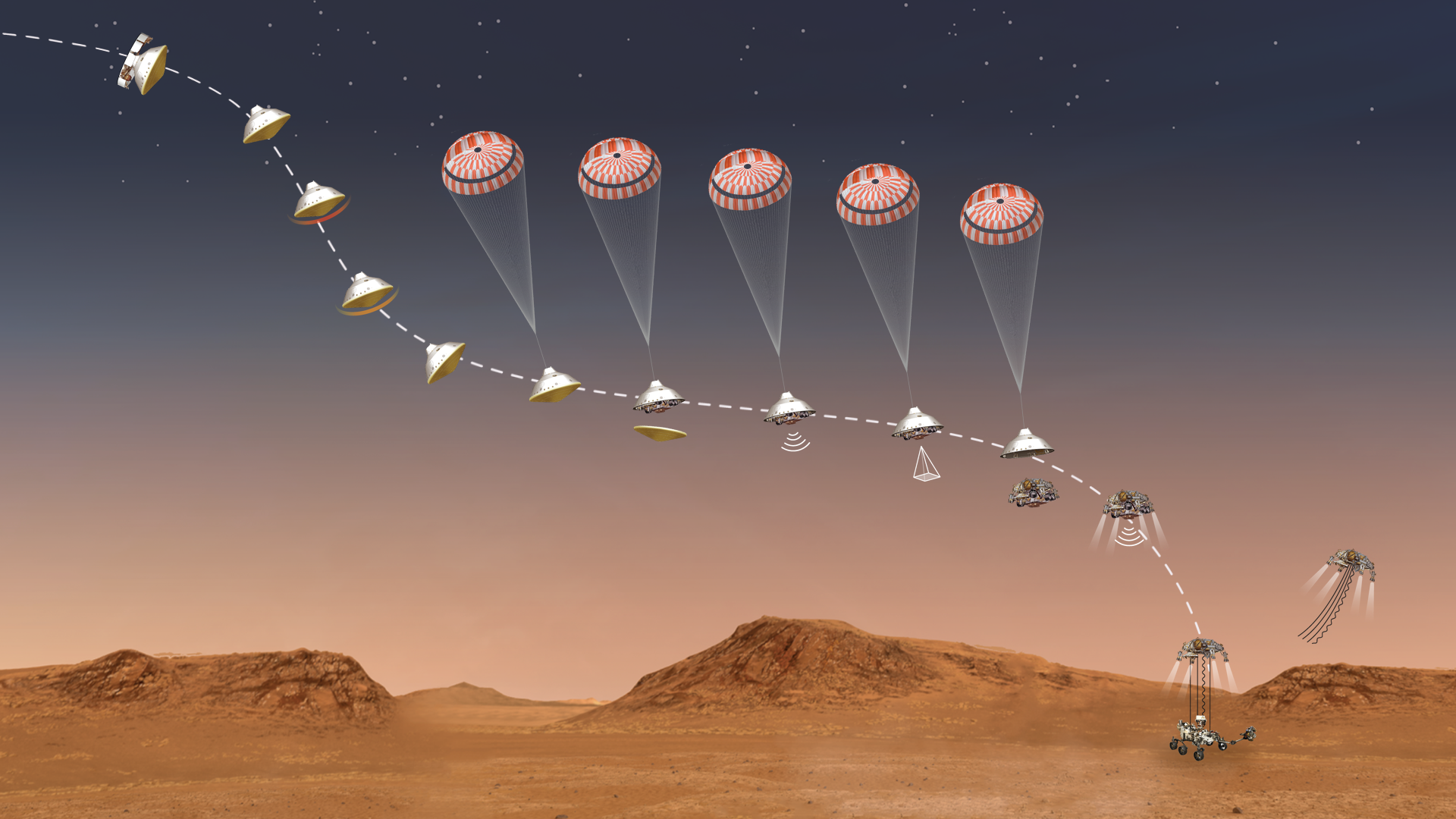
This illustration shows the events that occurred in the final minutes of the nearly seven-month journey that NASA’s Perseverance rover took to Mars.
NASA/JPL-Caltech
High Precision Position Estimation
As high as 2.6 miles (4.2 kilometers) above the surface, the Mars 2020 TRN system’s onboard camera started taking real-time photos of the terrain and matching landmarks to preloaded maps to provide spacecraft position, like GPS, all within 10 seconds. For the Mars 2020 mission, TRN improved the location estimate accuracy from 2 miles (3.2 kilometers) to 0.025 miles (40 meters) or better.
Multi-Point Landing
With the addition of TRN, a spacecraft has options for landing sites. After the position estimates are calculated, TRN can choose the safest landing position within its target landing zone and use the small amount of fuel left onboard to divert, avoiding medium to large size hazards. With more fuel, the spacecraft could perform larger adjustments to provide other landing options. With multi-point landing capabilities, instead of arriving at a safe location and driving to the science site, a rover can land directly at the target destination.
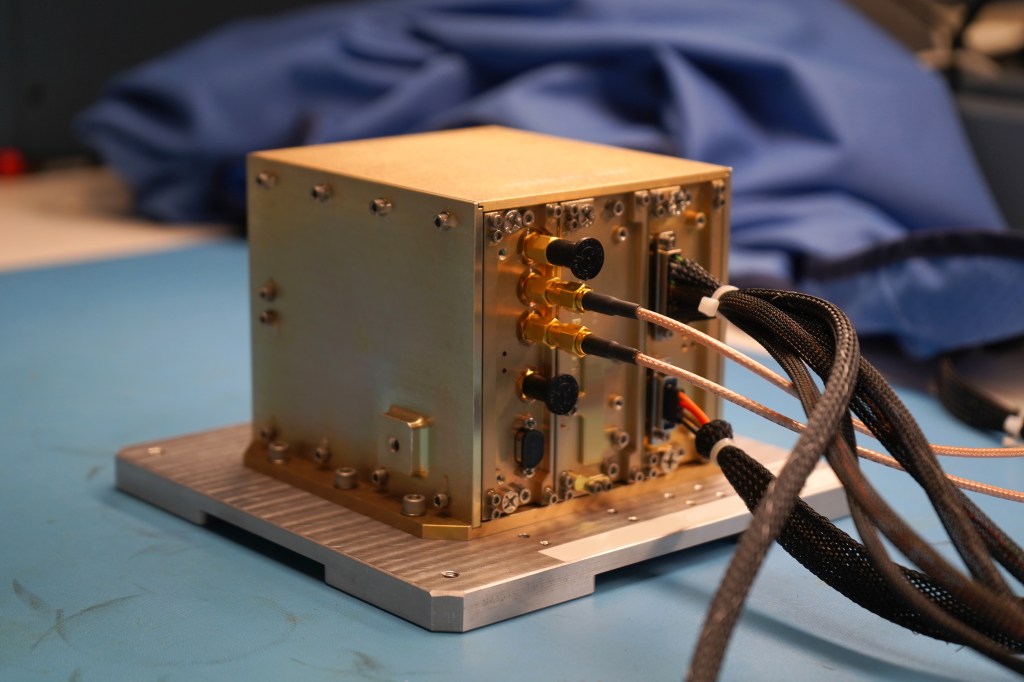
Simple Design
TRN’s simple, cost-effective design is advantageous for missions, not only in functionality but also volume and power. TRN only has two main compact components, a camera, and a computer. Although the computer needs to calculate position estimates and recommendations in addition to processing and storing images, it uses relatively low power. This allows greater allocation of power to other science payloads and functional systems.
Pre-2014: Inception and Early Development
As scientists narrowed down the list of target locations on Mars to collect precious samples, many of the most interesting sites had hazardous terrain where it would be difficult to land a rover. NASA JPL recognized the critical need for precision landing capabilities and came up with the concept of TRN. TRN was advanced over years with multiple funding sources through various NASA programs.
2013-2014: Flight Demonstration
In 2014, through two suborbital flights funded by STMD’s Flight Opportunities program, TRN was tested as part of the Autonomous Descent and Ascent Powered-flight Testbed (ADAPT) aboard Masten Space Systems’ Xombie vertical takeoff, vertical landing rocket in the Mojave Desert. During descent, TRN successfully navigated Xombie’s course by recognizing terrain features and providing relative position to the target landing site.
2015-2017: Technology Maturation and Growth
STMD’s Game Changing Development (GCD) program advanced TRN as part of the Intelligent Landing System, improving capabilities for safe landing for a potential future mission to land on Europa, one of Jupiter’s moons.
In 2017, TRN was demonstrated again on Masten Space Systems’ Xodiac rocket as part of STMD’s CoOperative Blending of Autonomous Landing Technologies (COBALT) project.
2018: Commercialization
STMD awarded two TRN-related Tipping Point technology development award to Astrobotic Technology and Blue Origin to develop TRN solutions for lunar missions.
TDM supported TRN’s Landing Vision System helicopter demonstration
NASA/JPL-Caltech
2019-2021: Technology Demonstration
STMD’s Technology Demonstration Missions (TDM) supported further maturation of TRN, including several design reviews, an additional helicopter demonstration in 2019 in Death Valley National Park, and integration of the software, algorithms, and sensors into a single system before the Mars 2020 launch.
As TRN evolved, it was also implemented for other projects. GCD’s Safe & Precise Landing – Integrated Capabilities Evolution (SPLICE) project included TRN in its suite of technologies around precision landing and hazard avoidance. In 2019, the SPLICE TRN was tested onboard Masten’s Xodiac rocket as a critical step toward follow-on flight testing in 2020 and 2021 through a GCD and Flight Opportunities-supported suborbital flight demonstration aboard Blue Origin’s New Shepard rocket.STMD’s GCD is funding a Lunar Digital Elevation Maps, Mapping, Modeling, and Validation effort for improving lunar digital elevation maps for TRN and hazard detection systems. In 2020, Intuitive Machines was awarded an STMD Tipping Point related to TRN image and map processing.
Infusion And Commercialization
Mars Exploration Infusion: Mars 2020 Mission TRN fulfilled a mission-critical capability for Mars 2020, enabling a safe landing at the preferred science location to meet mission objectives. Perseverance’s main goals are to study the geological environment of the landing area, seek signs of ancient microbial life, and collect precious Martian samples for possible return to Earth. Studying Martian terrain and habitability will further prepare NASA for future crewed Mars missions. At least 13 other STMD-supported technologies are also onboard the Perseverance Rover, including MOXIE, MEDLI2, Motiv Robotic Arm, and more.
NASA has been instrumental in our work in TRN, through multiple STMD awards, allowing us to develop critical tools to get the technology over the line and demonstrate its potential as a commercial product.
Dr. Andrew Horchler
Chief Research Scientist for Astrobotic
Lunar Exploration Commercial Infusion: Astrobotic Technology and Blue Origin Astrobotic is working with JPL under an STMD Tipping Point to integrate parts of the Mars 2020 Lander Vision System into a commercial lunar TRN solution called OPAL. The maps for TRN are critical to the success of high-stakes missions to the Moon. Lunar TRN maps are significantly larger in extent than those for Mars due to the shape of the lander descent profile. The sweeping shadows at the poles where future lunar missions will land provide further challenges. Astrobotic’s “bolt-on” solution incorporates all flight hardware and software, as well as tools for 3D terrain modeling and real-time physics-based lighting simulation required for generating and validating accurate TRN maps for precision lunar landing. OPAL will complete a technology demonstration on Peregrine Mission 1. Astrobotic will also use TRN to support the landing of NASA’s Volatiles Investigating Polar Exploration Rover (VIPER). Both landings support deliveries as part of NASA’s Commercial Lunar Payload Services initiative.
NASA STMD is the space industry’s technology partner. Our collaborations advance the state of the art and help us test capabilities needed for our commercial business model.
Brent Sherwood
Senior Vice President, Advanced Development Programs, Blue Origin
Blue Origin collaborated with JPL and Johnson Space Center to mature critical technologies that enable safe and precise landing for lunar missions through an STMD Tipping Point. This award matured several of NASA’s descent and landing sensors, such as TRN, including a flight demonstration aboard its New Shepard vertical takeoff, vertical landing suborbital vehicle. Blue Origin’s TRN solution will demonstrate landing capabilities necessary for enhancing lunar missions and create new commercial opportunities for planetary exploration.
NASA team members next to the New Shepard post landing.
TRN is a part of GCD’s Intelligent Landing System (ILS), which would support future missions to Europa. Unlike Mars and the Moon, there aren’t high-resolution images of Europa’s surface, so a vision-based navigation sensor alone would be insufficient. Furthermore, a spacecraft landing on Europa would encounter not only terrain hazards, but also a high radiation environment and limited onboard resources. Therefore, the ILS combined several precision landing, navigation, and hazard detection capabilities designed to ensure a successful Europa landing mission. Combining TRN with other technologies, a spacecraft could further reduce dangerous terrain risks, while capturing photos of the surface and determining velocity of the spacecraft. ILS would also be able to generate high-elevation maps of the surface, beneficial for future missions as well.
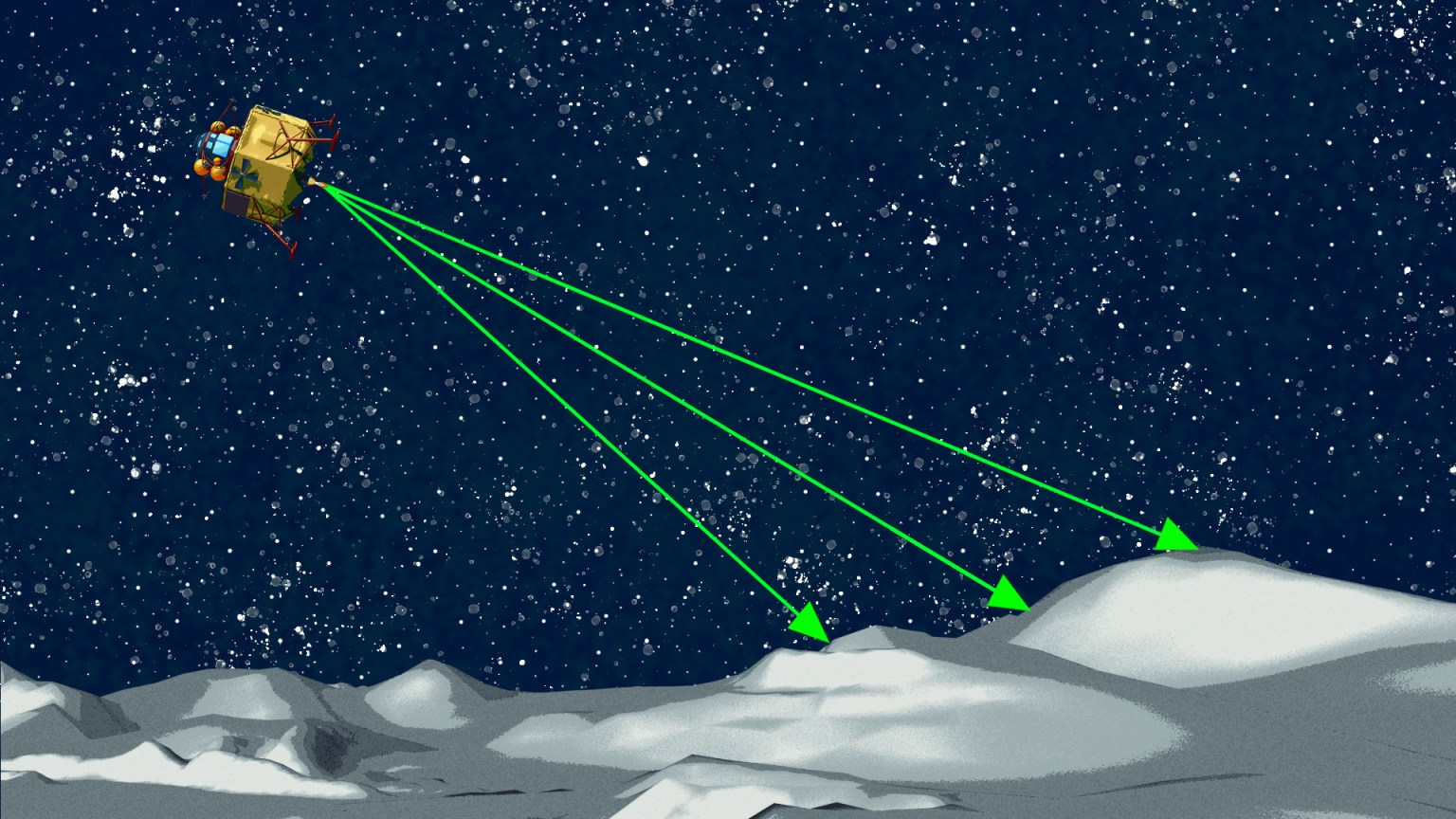
The GCD SPLICE project includes TRN within a broader suite of technologies for safe and precise touchdown of landers that can be leveraged for future robotic and human missions to the Moon, Mars, and other planetary exploration. The technologies include high-resolution lidar sensors, high-performance computing, and advanced algorithms, which together enable a lander to detect small, basketball-sized hazards (20-30 cm) during descent toward touchdown and to do so even in the presence of unlighted or shadowed terrain where cameras are unable to acquire imagery. Working in tandem, the suite of sensors in the SPLICE projects can enable even larger landing adjustments on future missions to target safe landing in even more hazardous terrain that has high scientific and exploration potential.
Contact Swati Patel to share how NASA’s Space Technology Mission Directorate has supported your technology!