
















![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/missions/a-step/FFR_Earth_Background_20251120%20.png?w=1024)











Step 2: Close Approach Risk Assessment
Conjunction Risk Assessment
The results from a Conjunction Assessment (CA) screening merely indicate that two objects will come into somewhat close proximity; they do not determine what the collision risk actually is. Because risk is the combination of both the likelihood of an unfavorable event and the expected consequence of that event, both such aspects of a satellite conjunction need to be evaluated to determine the risk.
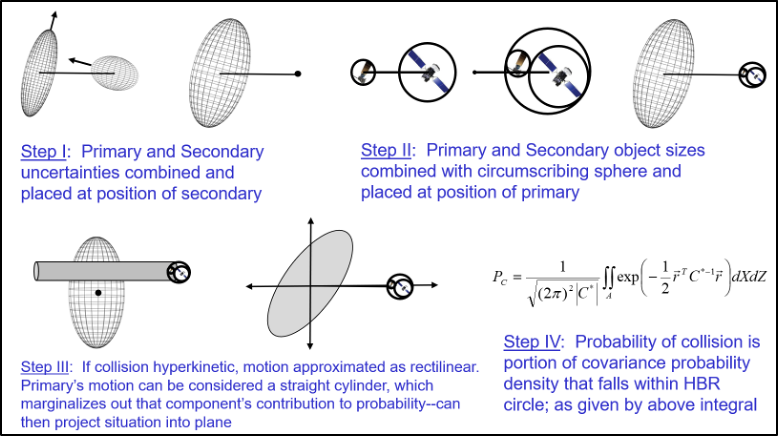
The most widely used approach to determine satellite collision likelihood is to calculate the probability of collision (Pc), which represents the likelihood that the actual miss distance between the two satellites will be smaller than their combined size, thus precipitating a collision. The likelihood calculation assumes a probabilistic form because the ephemerides used to identify the conjunction represent predictions with uncertainty; in considering these two trajectories and their uncertainties, one can calculate this probability of collision. The details of the theory of the Pc calculation, and relevant bibliography as well, are given in the NASA CA Best Practices Handbook (https://nodis3.gsfc.nasa.gov/OCE_docs/OCE_51.pdf). Appendix N; but a one-pane summary of the technique is given in the diagram below. At NASA CARA, Pc values greater than 1E‑07 merit operational attention, and values greater than 1E-04 require mitigation actions.
Assessments of collision consequence are more contextual. For protected assets, a collision with an object of any type can generally be presumed to result in loss of mission; and for most owners/operators, that is a consequence that cannot be sustained. However, in triage situations in which perhaps only one of a number of contemporaneous conjunctions can be mitigated, or for issuing warnings for debris-on-debris conjunctions, it makes sense to understand consequence as the amount of debris that is expected to be produced should a conjunction actually result in a collision. Large debris-producing events will pollute a particular orbital regime much more seriously than a collision that might produce only a handful of trackable objects.
Estimates of the amount of debris that a collision might produce are performed by the NASA-produced EVOLVE model, which is an empirical model developed from performing hyperkinetic collisions of satellites in a vacuum chamber and examining the debris produced. A basic distinction is made between catastrophic collisions, in which both objects are completely fragmented; and non-catastrophic collisions, in which the smaller (lighter) object is fragmented but the larger (heavier) object only cratered. These different modes of collision, and the resultant number of pieces for each, are governed by the masses of the two satellites and their relative velocity.
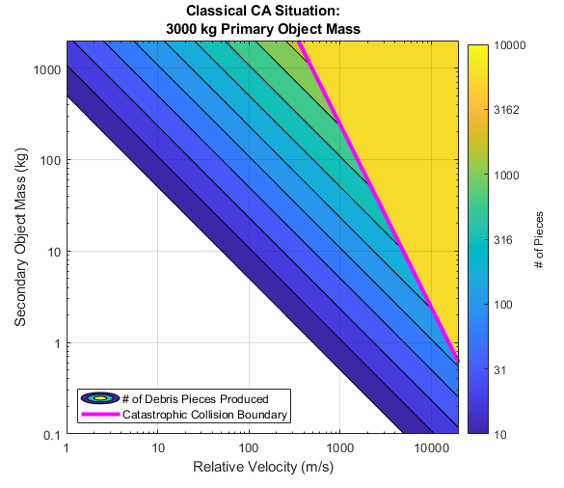
Expected debris production, as a function of the mass of the secondary object (primary object is fixed here at 3000kg), is shown in the graphic at right. The x-axis is the relative velocity of the two objects (most Low Earth Orbit (LEO) conjunctions have relative velocities around 10,000 m/s), the y-axis is the mass of the secondary object, and the color is the amount of debris produced. The yellow area, to the right of the magenta line, is the region of catastrophic collisions that produce large amounts of debris (several thousand pieces greater than 5cm in size); the secondary object needs to be of non-trivial mass and high relative velocity to enter this region of the graph. To the left of the magenta line, especially for lighter objects, the debris production is substantially smaller. A LEO collision can therefore be both a high-debris-producing event and, with small debris secondaries, an event of only modest debris productions. Typically, an event would need to produce 50-100 pieces in order to be considered significant. More information on the theory behind this model, as well as details regarding how object (especially debris object) masses are estimated, is given in the NASA CA Best Practices Handbook, Appendix N.
If the risk assessment authority, by considering both the collision likelihood and consequence, concludes that a particular conjunction is a high collision risk, the conjunction then moves to the final phase of collision avoidance, namely mitigation action planning and, potentially, execution.