















Human Exploration Telerobotics (HET)

Forging a permanent human presence in space requires a great deal of groundwork to be laid — from deeper understanding of all our future destinations and their environments to extra sets of “eyes” and “hands” that help and protect our astronauts during their journeys in space and long-term expeditions on other worlds. To that end, NASA and its partners rely on a variety of highly capable, versatile and sophisticated robots to investigate worlds beyond our own, refine tools, technologies and systems, complement the work of human astronauts — and prepare the way for crewed missions to the farthest reaches of the solar system.
The Human Exploration Telerobotics (HET) Technology Demonstration Mission is demonstrating how telerobotics — remote control of a variety of robotic arms, rovers and other devices — can take routine, highly repetitive, dangerous or long-duration tasks out of human hands, and improve and hasten human space exploration missions to new destinations.
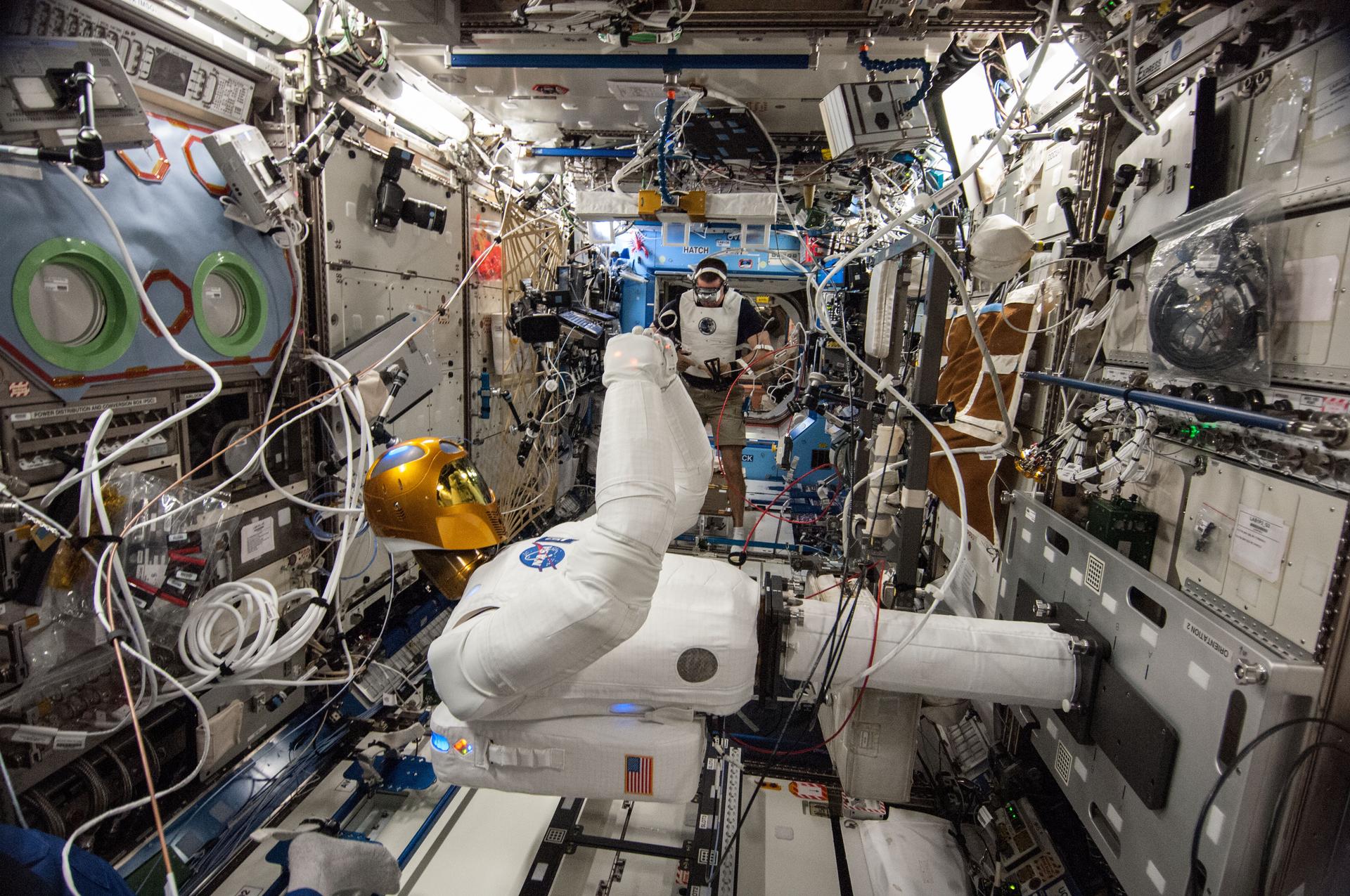
The team, led by NASA’s Ames Research Center in Moffett Field, Calif., is testing robots remotely operated by controllers on the ground or by astronauts in space. Two of these robots — Robonaut 2 and the “Synchronized Position Hold, Engage, Reorient Experimental Satellites,” or SPHERES — are aboard the International Space Station. Others, including the K10 planetary rover, operate at NASA field centers. All these projects will provide crucial new insight into the requirements, benefits, limitations, costs and risks of integrating telerobotics into future deep-space exploration missions. Researchers also will be better able to coordinate human and robot activities to maximize crew safety, mission success and scientific return on investment.
The Human Exploration Telerobotics team also is leading testing of new Disruption Tolerant Networking (DTN) software for telerobotics to improve network connectivity and minimize delays in data delivery between computers on the ground and robots in space. The innovative DTN solution is helping NASA and other space agencies create a “Space Internet” with broad applications for all future robotic and human operations in space. The team also collaborates with industry to increase the use of open-source software and open standards for robotics.
Human Exploration Telerobotics research will continue through 2014.
The HET project is sponsored by NASA’s Space Technology Mission Directorate and is managed by NASA’s Ames Research Center.