



















STS-100
STS-100 installed the advanced robotic arm, called Canadarm2, outside of Destiny. The exchange of the cradle from station arm to shuttle arm marked the first ever robotic-to-robotic transfer in space.
Orbiter
mission duration
Launch
Landing

Mission Facts
Mission: International Space Station Assembly Flight 6A
Space Shuttle: Endeavour
Launch Pad: 39A
Launched: April 19, 2001, 2:40:42 p.m. EDT
Landing Site: Edwards Air Force Base, Calif.
Landing: May 1, 2001, 12:10:42 p.m. EDT
Runway: 22
Rollout Distance: 7,964 feet
Rollout Time: 74 seconds
Revolution: 186
Mission Duration: 11 days, 12 hours, 54 minutes
Miles Traveled: 4.9 million
Crew
Kent V. Rominger, Commander
Jeffrey S. Ashby, Pilot
Yuri V. Lonchakov, Mission Specialist
Scott E. Parazynski, Mission Specialist
Umberto Guidoni, Mission Specialist
Chris A. Hadfield, Mission Specialist
John L. Phillips, Mission Specialist
Mission Highlights
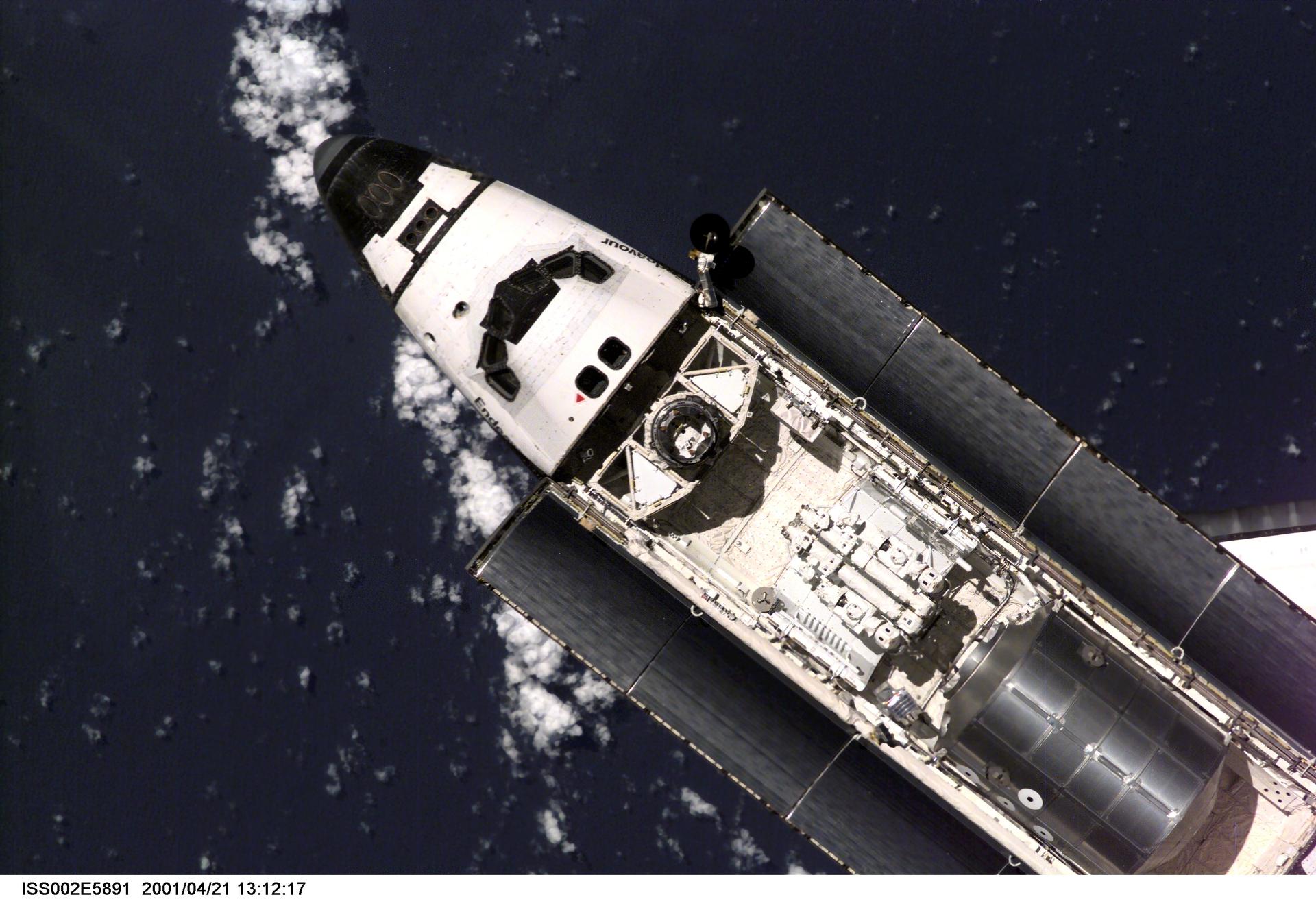
Docking with the International Space Station occurred at 9:59 a.m. EDT April 21.
The advanced robotic arm, called Canadarm2, was attached to a pallet on the outside of Destiny. It later was directed to “walk off” the pallet and grab onto an electrical grapple fixture on the Lab which would provide data, power and telemetry to the arm. Days later the arm was used to hand off the cradle, on which it rested inside Endeavour’s payload bay during launch, to the orbiter’s arm. The exchange of the cradle from station arm to shuttle arm marked the first ever robotic-to-robotic transfer in space.
The 6,000 pounds of cargo inside the Multi-Purpose Logistics Module Raffaello was transferred to the station, including two new scientific experiment racks for Destiny and the first three U.S. commercial payloads. In turn, 1,600 pounds of material were stored inside Raffaello for return to Earth.
On April 23, four days after launch, the hatches between Endeavour and the space station were opened, allowing the shuttle crew and station crew to greet one another for the first time.
Other crew activities during the mission included attaching an ultrahigh frequency antenna on the outside of the station and, inside, calibrating the Space Vision System, an alignment aid for operating the robotic arm, plus helping repair the space station’s treadmill and filming for IMAX.
EVA No. 1: 7 hours, 10 minutes—On April 22, Mission Specialists Scott Parazynski and Chris Hadfield removed the Ultrahigh Frequency antenna from the pallet and installed it on the U.S. Lab Destiny. Then they unfolded the Canadian arm and, while it was still secure in its pallet, attached one end to Destiny. Next they connected cables to give the arm computer communication with the Lab and secured the fasteners to keep the booms in rigid position.
EVA No. 2: 7 hours, 40 minutes — On April 24, Hadfield and Parazynski connected the Power and Data Grapple Fixture circuits on Destiny for the SSRMS. They also removed an early communications antenna and transferred a spare Direct Current Switching Unit from Endeavour’s payload bay to an equipment storage rack on Destiny.
As the astronauts rewired power and data connections for the arm, the backup power circuit failed to respond to commands from station flight engineer Susan Helms, operating a workstation inside Destiny. Disconnecting and reconnecting the cables at the base of the arm resolved the situation and the redundant power path to the arm was completed.
Computer problems surfaced late on April 24 when flight controllers for the station experienced a loss of Command and Control computer No. 1, one of three computers on board for systems management. The result was a loss of communication and data transfer between the space station Flight Control Room in Houston and the station.
Communication was routed through Endeavour, which enabled the station crew and flight controllers to talk to one another. No computer problems were encountered on Endeavour. Activities involving the SSRMS were postponed.
Station flight engineer Susan Helms, using a laptop computer, was able to restore the ground’s ability to monitor and send commands to the station’s U.S. systems. Through the laptop, data from the station computers could be transmitted to the ground for analysis and investigation of the problems.
Computer restoration continued successfully, especially C&C number three. C&C number one was found to have a failed hard drive. It was replaced by a backup payload computer.
Ground controllers successfully synchronized timers on all on-board computers and investigated an error in the software load that might have caused the computer problem. With one operational C&C computer in Destiny and a back-up laptop in Unity, the undocking procedure for Raffaello was given the go-ahead.
Endeavour undocked from the space station April 29 at 1:34 p.m. EDT. Pilot Jeff Ashby performed a three-quarter circle flyaround of the station and at 2:28 p.m. fired a separation burn for final departure.
STS-100








STS-100 Brings Canadian Robotic Arm to the Space Station
In April 2001, as the Expedition 2 crew of Yuri V. Usachev of Roscosmos and NASA astronauts James S. Voss…
Read the Story
Resources


Shuttle News




Retired Space Shuttle Locations
Shuttle Atlantis – Kennedy Space Center Visitor Complex Shuttle Discovery – Steven F. Udvar-Hazy Center Shuttle Endeavour – California Science…
Read the Story