

























Marc Cohen
Marc M. Cohen, Architect
NIAC 2012 Phase I Cohen Robotic Asteroid Prospector Final Report
Description
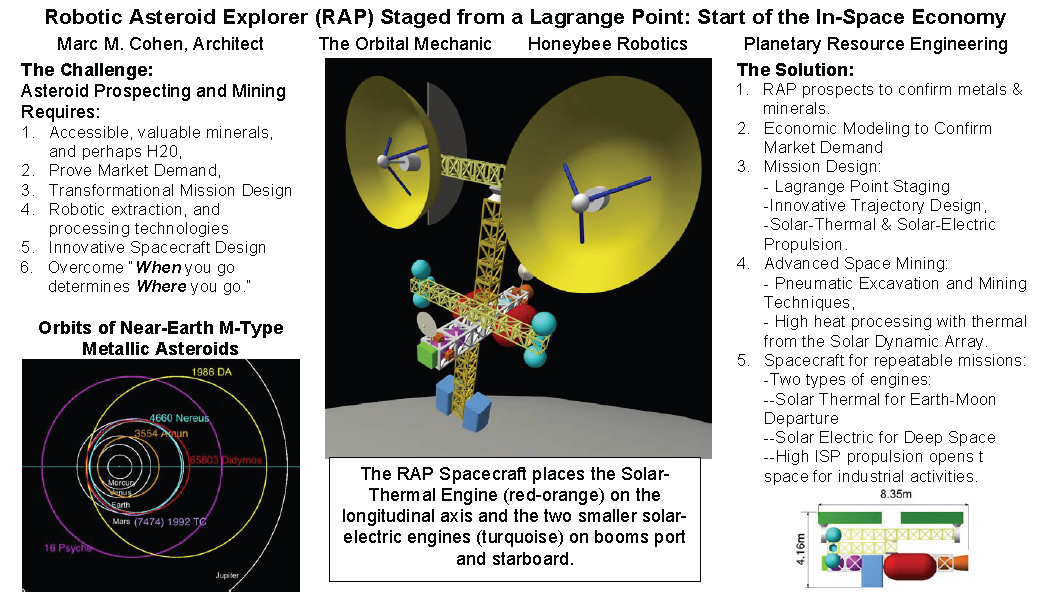
OBJECTIVES: The objectives of the Robotic Asteroid Prospector (RAP) project are to examine and evaluate the feasibility of asteroid mining in terms of means, methods, and systems. This study decomposes the challenge of asteroid mining into four key efforts:
- Mission design, including trajectory and logistics from an Earth-Moon Lagrange Point (EMLP) to the asteroid and return to that EMLP,
- Spacecraft design including propulsion and Mission operations,
- Mining technology for microgravity and vacuum operations, and
- How these efforts can add up to a business case for asteroid mining.
SCOPE: The focus is to design the Robotic Asteroid Prospector (RAP) spacecraft and missions so that the spacecraft, mission architecture, extraction, and analysis technologies are “mining-forward.” The system will be scalable from robotic to human-tended operations for large-scale extraction and beneficiation. RAP will serve as a testbed for the later industrial-scale mining missions, including human-operated missions. For Phase 1, this proposal describes a prototype RAP spacecraft and mission design trade study. Phase 2 will involve prototype hardware development and operational simulation.
APPROACH: The Project’s approach addresses six points:
- Abundant and accessible minerals in the Type M asteroids,
- Market demand on Earth and the business case asteroid mining,
- Assessment of the five Lagrange Points as a fueling depot and staging platform.
- Asteroid types, including M-Type for metals and C-Type for water, their orbits, and trajectories,
- Robotic extraction and processing, and
- Robotic spacecraft leading to human missions
ASSUMPTIONS: RAP assumes these future capabilities:
- A Venus orbit NEO observatory will identify and characterize more asteroids in general and metallic M-Types in specific.
- Commercial transport for crew and cargo will be available to Earth-Moon Lagrange Points (EMLP) and return to Earth.
- An EMLP fueling depot and mission staging platform sustained by commercial “freighters” and “tankers” from which to fuel and deploy the RAP on its mission.
CAPABILITIES: Transformational trajectory design makes the RAP mission feasible using low thrust/high Isp electric propulsion and moderate thrust/moderate Isp propulsion, such as solar thermal. The RAP’s power-rich design provides energy for pneumatic mining and beneficiation and high-heat processing. We must develop new in-space extraction and processing technologies. Mass reduction and ore concentration enables return shipment to and EMLP and to Earth.
FOCUS: The project focuses on three topics that it will advance from TRL-1 to TRL-2. These three disciplines constitute the unique enablers for asteroid mining:
- Time-flexible trajectory analysis and mission design,
- Microgravity and vacuum mining technology, and
- Spacecraft design to implement disciplines 1 & 2, scalable to human-robotic missions.
STRATEGY: Initial prospecting missions will be robotic, although early industrial mining missions will require both humans and robots on-site. There will be too many judgment calls and qualitative decisions on-site for robots alone. Humans will need the practice of mining in space with robots to learn how to innovate and to work efficiently, reliably, and safely.
EXPECTED OUTCOMES: The expected outcomes of this project include:
- An assessment of whether mining a candidate metallic asteroid or carbonaceous asteroid (possibly containing water) is feasible in terms of developing a concept for mission design, mining technology, and spacecraft design,
- Selection of an Earth-Moon Lagrange Point for a fueling depot and staging platform, the preliminary design of the RAP spacecraft, transformational trajectory design,
- RAP spacecraft preliminary design, and
- Design concepts for the microgravity and vacuum prospecting, extraction, and ore processing system.



