


























Javid Bayandor
Virginia Polytechnic Institute and State University
NIAC 2016 Phase I Bayandor Light Weight Multifunctional Planetary Probe Final Report
Description
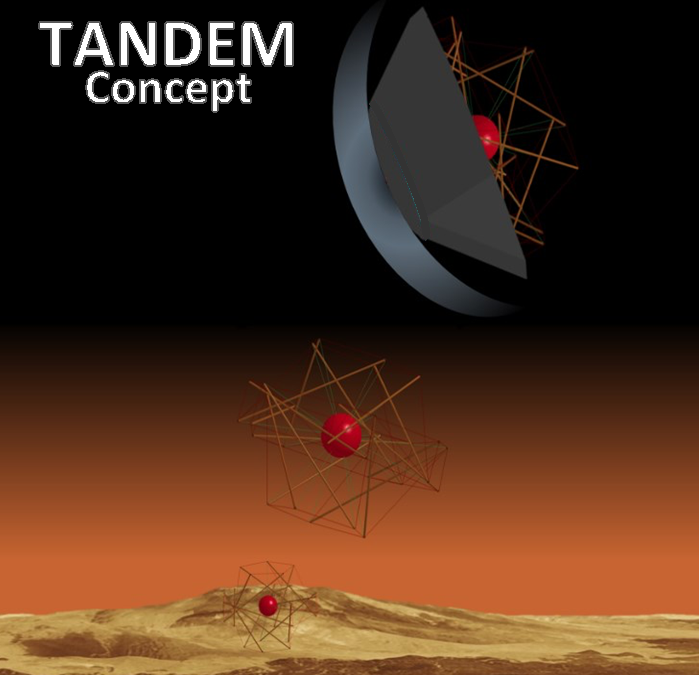
The Tension Adjustable Novel Deployable Entry Mechanism (TANDEM) is a specially configured tensegrity structure that is designed to act as the frame of a deployable heat shield. TANDEM combines the infrastructure used for the Entry, Decent, and Landing sequence as well as on-the-ground locomotion into a single multifunctional system. Reusing the same infrastructure for every section of the mission makes TANDEM one of the most efficient systems ever proposed. Although its touchdown mass may be higher than other landers, the versatility of its components translates to a tremendous mass reduction for the whole mission. TANDEM is an entry vehicle and lander for planetary exploration class probes. It utilizes a semi-rigid, 3-D woven carbon-cloth deployable heat shield. What separates TANDEM from other deployable entry vehicles is its use of tensegrity structure as the frame of the deploying mechanism. The use of tensegrity robotics for entry vehicles is a currently unexplored concept, providing numerous potential benefits during entry and descent. These benefits include a mass efficient mechanism for actively guided entry, active control of L/D ratio, as well as active control of aerodynamic center. Like most tensegrity concepts, it inherently provides omni-directional protection on impact. However, due to the unique shape of the vehicle, it can actively adjust its configuration for optimal landing. If unforeseen circumstances cause the lander to turn upside-down, TANDEM can be programed to change its aerodynamic center and reorient itself. Alternatively, it can adjust its outer circumference to provide a safer landing based on its free fall orientation. This adds a remarkable level of reliability and safety to any mission using the TANDEM concept. Conventional tensegrity locomotion depends largely on actuation of the outer cables. This requires mechanical devices in each strut to reel in the cables. However, for extreme environment applications such a system can prove infeasible as it requires each strut to be protected from the environment. This in turn can cause the lander to be prohibitively heavy. On the other hand, the TANDEM technology can be effectively applied for locomotion through using only inner cable actuation. The locomotion mechanisms can hence be housed in a central payload module, using a common insulation and pressure vessel. TANDEM is designed to enable landing at any orientation and can traverse significantly rougher terrain than existing rovers. This means new landing sites can be reached. Instead of landing in low risk areas then traveling to the closest area of scientific interest, missions using TANDEM can land directly in the region of interest. The TANDEM concept provides a high level of adaptability and controllability which can be utilized in entry, descent, landing, and for locomotion by actuating specific inner cables. This opens all new avenues in utilizing multifunctional exploration systems with enhanced maneuvering options. Additionally, TANDEM presents a robust, low weight method of locomotion that does not require ultra-high temperature mechanisms for mobility in extreme environments. These attributes make it a superior concept for near- to mid-term missions.



