


















![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)






Jonathan Sauder
NASA Jet Propulsion Laboratory
Description
Extreme environments abound in the solar system and include the radiation around Jupiter, high surface temperatures on Mercury and Venus, and hot, high pressure environments occurring deep beneath any active planet’s surface. Generally, the most environmentally sensitive components of a rover or spacecraft are the electronics, which will fail in heat, stop operating in extreme cold, or experience upsets when bombarded with radiation. In this proposal, we explore a long duration in-situ extreme environment rover on the surface of Venus. The planet has a surface temperature hot enough to melt lead at 460°C, and a pressure high enough to crush the hull of a nuclear submarine at 90 bar. The Soviets made a concerted effort to explore this extreme environment from the late 1960’s through the early 1980’s. Of their 14 attempted Venera/Vega landings, only 9 were successful, and even these robust craft only operated for 23 to 127 minutes before the electrical systems succumbed to the extreme environment. Modern mission proposals do not fare much better. A recent flagship Venus mission proposal costing $2-3 billion utilizes a liquid gas cooling system, but could only ensure survivability on the surface for less than one day before system failure. As such, it means samples from multiple geologic units and critical longitudinal weather data, important to informing dynamic planetary models and comparative climatology, are impossible to obtain with a single mission to Venus.
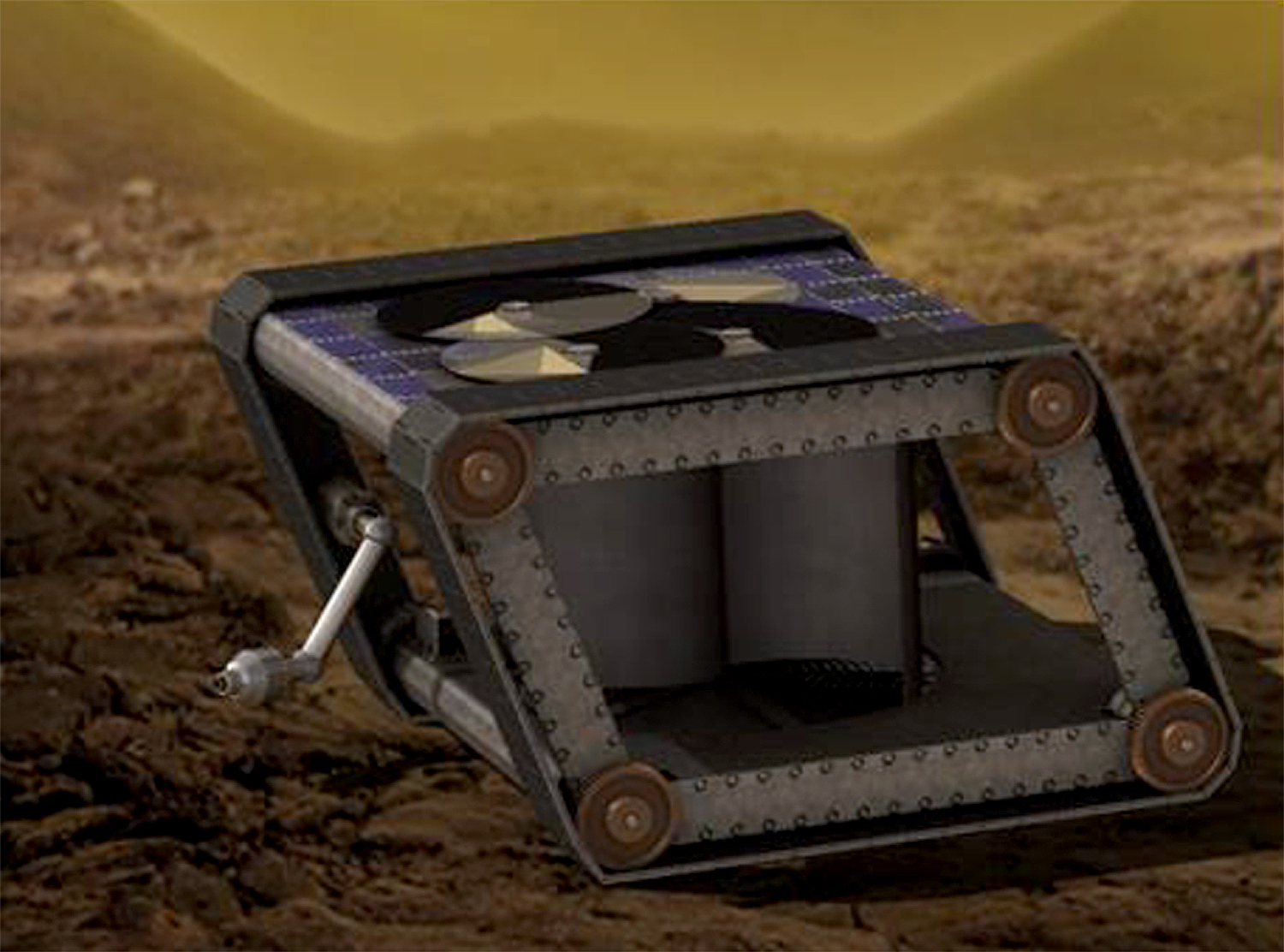
Two enabling technologies, RTG powered cooling systems and high temperature electronics, have been proposed to enable long duration in-situ Venus operations. The former is highly complex and requires billions in R&D to cool a small chamber of electronics, while the latter is not close to the integration level required for a rover. We propose a third approach, the Automaton Rover for Extreme Environments (AREE), an exciting concept which enables long duration in-situ mobility on the surface of Venus through robust mechanisms. An automaton is a mechanical device capable of performing a series of complex actions to achieve a specific result.
They have long been explored as art forms but remain unexplored for space applications. The automaton rover is designed to reduce requirements on electronics while requiring minimal human interaction and based on the subsumption architecture from robotics, where simple reactions of the rover lead to complex behavior. AREE combines steampunk with space exploration to enable science measurements unachievable with today’s space technology.
In Phase 1 purely mechanical rover technologies were compared to a high temperature electronics rover and a hybrid rover technologies. A purely mechanical rover, while feasible, was found to not be practical and a high temperature electronics rover is not possible with the current technology, but a hybrid rover is extremely compelling. Phase 1 mitigated our highest risks, demonstrating passive signaling was possible, the power budget balanced, and the rover fits within current EDL systems. Building on the design created in Phase 1, the objective of this proposed work is to finalize the trades with regards to implementation of locomotion and signaling systems, develop an end to end rover design, and perform Venus environmental testing of a representative prototype.
Performing this work is not only critical for advancing the automaton rover concept, but is also important for changing the conversation on exploring Venus. Today, long duration in-situ mobile access on Venus has not been considered a realistic option. AREE demonstrates how such a system can be achieved today by cleverly utilizing current technology and enhanced by the technology of tomorrow.
2017 Phase I and Phase II Selections



