














NASA named Stanford University of California winner of the Lunar Autonomy Challenge, a six-month competition for U.S. college and university student teams to virtually map and explore using a digital twin of NASA’s In-Situ Resource Utilization Pilot Excavator (IPEx).
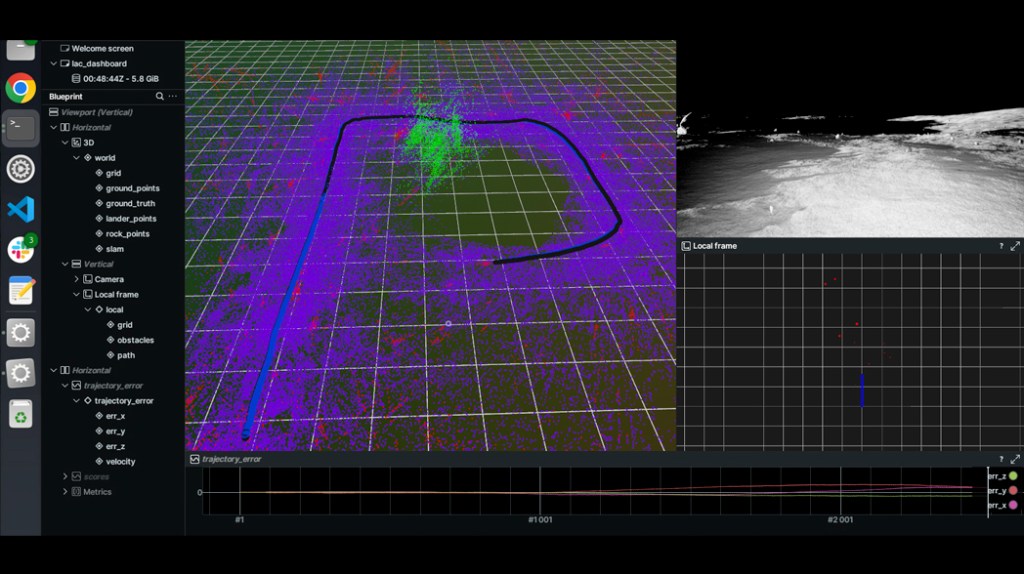
The winning team successfully demonstrated the design and functionality of their autonomous agent, or software that performs specified actions without human intervention. Their agent autonomously navigated the IPEx digital twin in the virtual lunar environment, while accurately mapping the surface, correctly identifying obstacles, and effectively managing available power.

The Lunar Autonomy Challenge has been a truly unique experience. The challenge provided the opportunity to develop and test methods in a highly realistic simulation environment."

Adam dai
Lunar Autonomy Challenge team lead, Stanford University
Dai added, “It pushed us to find solutions robust to the harsh conditions of the lunar surface. I learned so much through the challenge, both about new ideas and methods, as well as through deepening my understanding of core methods across the autonomy stack (perception, localization, mapping, planning). I also very much enjoyed working together with my team to brainstorm different approaches and strategies and solve tangible problems observed in the simulation.”
The challenge offered 31 teams a valuable opportunity to gain experience in software development, autonomy, and machine learning using cutting-edge NASA lunar technology. Participants also applied essential skills common to nearly every engineering discipline, including technical writing, collaborative teamwork, and project management.
The Lunar Autonomy Challenge supports NASA’s Lunar Surface Innovation Initiative (LSII), which is part of the Space Technology Mission Directorate. The LSII aims to accelerate technology development and pursue results that will provide essential infrastructure for lunar exploration by collaborating with industry, academia, and other government agencies.
The work displayed by all of these teams has been impressive, and the solutions they have developed are beneficial to advancing lunar and Mars surface technologies as we prepare for increasingly complex missions farther from home.”

Niki Werkheiser
Director of Technology Maturation and LSII lead, NASA Headquarters
“To succeed, we need input from everyone — every idea counts to propel our goals forward. It is very rewarding to see these students and software developers contributing their skills to future lunar and Mars missions,” Werkheiser added.
Through the Lunar Autonomy Challenge, NASA collaborated with the Johns Hopkins Applied Physics Laboratory, Caterpillar Inc., and Embodied AI. Each team contributed unique expertise and tools necessary to make the challenge a success.
The Applied Physics Laboratory managed the challenge for NASA. As a systems integrator for LSII, they provided expertise to streamline rigor and engineering discipline across efforts, ensuring the development of successful, efficient, and cost-effective missions — backed by the world’s largest cohort of lunar scientists.
Caterpillar Inc. is known for its construction and excavation equipment and operates a large fleet of autonomous haul trucks. They also have worked with NASA for more than 20 years on a variety of technologies, including autonomy, 3D printing, robotics, and simulators as they continue to collaborate with NASA on technologies that support NASA’s mission objectives and provide value to the mining and construction industries.
Embodied AI collaborated with Caterpillar to integrate the simulation into the open-source driving environment used for the challenge. For the Lunar Autonomy Challenge, the normally available digital assets of the CARLA simulation platform, such as urban layouts, buildings, and vehicles, were replaced by an IPEx “Digital Twin” and lunar environmental models.
“This collaboration is a great example of how the government, large companies, small businesses, and research institutions can thoughtfully leverage each other’s different, but complementary, strengths,” Werkheiser added. “By substantially modernizing existing tools, we can turn today’s novel technologies into tomorrow’s institutional capabilities for more efficient and effective space exploration, while also stimulating innovation and economic growth on Earth.”
FINALIST TEAMS
First Place
NAV Lab team
Stanford University, Stanford, California
Second Place
MAPLE (MIT Autonomous Pathfinding for Lunar Exploration) team
Massachusetts Institute of Technology, Cambridge, MA
Third Place
Moonlight team
Carnegie Mellon University, Pittsburgh, PA
OTHER COMPETING TEAMS
| Lunar Explorers | Arizona State University | Tempe, Arizona |
| AIWVU | West Virginia University | Morgantown, West Virginia |
| Stellar Sparks | California Polytechnic Institute Pomona | Pomona, California |
| LunatiX | Johns Hopkins University Whiting School of Engineering | Baltimore |
| CARLA CSU | California State University, Stanislaus | Turlock, California |
| Rose-Hulman | Rose-Hulman Institute of Technology | Terre Haute, Indiana |
| Lunar Pathfinders | American Public University System | Charles Town, West Virginia |