



















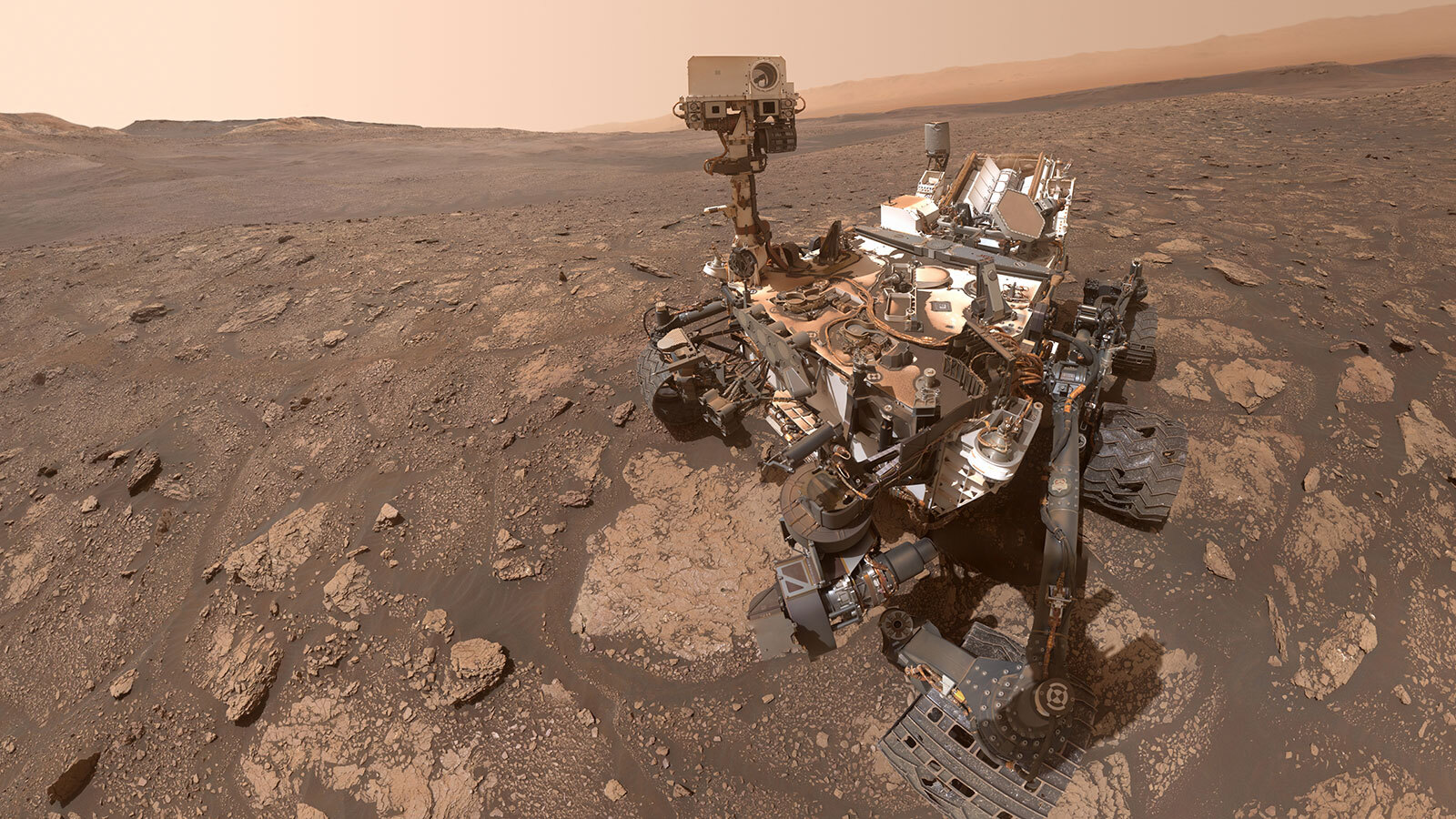
What does it take to drive a rover that’s more than 100 million miles away? Sophia Mitchell at NASA’s Jet Propulsion Laboratory has been driving the Mars Curiosity rover since 2018. In addition to her science and engineering background, Mitchell is also an avid hiker and pilot, and explains how she combines all of these interests and skills in her job. Curiosity landed on Mars on Aug. 6, 2012, and sends back images and other science data from Mount Sharp in Gale Crater. On Feb. 18, 2021, NASA’s Perseverance rover will land on Mars at Jezero Crater. Mitchell also explains how these craters are different and why she’s excited to have a second rover exploring the Red Planet.
Jim Green:What does it take to drive a rover on Mars? How easy or how hard is it? What do we need to know to do it right?
Jim Green:Hi, I’m Jim Green. And this is a new season of Gravity Assist. We’re going to explore the inside workings of NASA in making these fabulous missions happen.
Jim Green:I’m here with Sophia Mitchell, a NASA engineer at the Jet Propulsion Laboratory. Sophia currently works on the flight operations team for the Mars Curiosity rover. And she’s been involved in the Perseverance rover, soon to land on Mars. So, Sophia, welcome to Gravity Assist.
Sophia Mitchell:Hi, thank you so much for having me.
Jim Green:Before we named the rover, Curiosity, the whole program was called the Mars Science Laboratory or MSL.
Jim Green:Well, how long have you been driving Curiosity?
Sophia Mitchell:So my first drive on Mars with Curiosity was in 2018. It was actually right around New Year’s. And it was extremely exciting. But it was also very satisfying because learning to drive a rover is a very long process. And while driving, it wasn’t the end of that learning process. I began learning how to drive the rover in 2017.
Jim Green:Well, what’s the training like, I mean, it sounds like they really put you through some sort of wringer.
Sophia Mitchell:They do! So, one of the things about being a Mars rover driver is you have to really understand the system inside and out. And so I had to learn about how the differential and bogey, which is basically like the shock absorption system on the rover, works as it moves over different rocks. We actually went out into the Mars Yard, which is this Mars-simulated area that we have at JPL. It’s like a giant sandbox with all kinds of different surfaces and slopes and sand and rocks.
Sophia Mitchell:And we drove the version of MSL that we have on Earth called Maggie around in the Mars Yard. And that allowed us as trainees to understand how the system reacts in different situations. So when we see a certain terrain on Mars, then we can imagine ourselves well, if I drive the rover’s wheels over that sloped smooth rock, is it gonna slip? Is it gonna be able to grip that? Will I, do I need to worry about it, you know, sliding down and catching itself later?
Jim Green:Well, that sounds fantastic. So what’s it like then to plan the route? Do you always know where you’re going? Or how detailed of set of information you need to do that?
Sophia Mitchell:Right. So, planning the route, I like to think of like hiking. I’m an avid backpacker. And so I like to take the images that we get down from the surface. And those images have range data in them, which allows us to create a 3-D surface of Mars from the viewpoint of the Curiosity rover.
Sophia Mitchell:And so we can take those images and put on 3-D glasses, which I have right here, and actually see what it would look like if we were standing where the rover is on Mars. And so, based on that information, I can then think, if I were hiking, where would I place my feet. And in this case, we’re going to be placing the robotic wheels in order to get to where the science team would like us to go. Sometimes I jokingly will tell my friends, I work for Mars Uber, because it’s the science team saying, ‘We want to go over here,’ and we have to figure out how to get there safely.
Sophia Mitchell:Once you have that idea of where you want to go, then you have to also remember that you need to keep the wheel safe and avoid obstacles that the rover either can’t drive through such as deep sand or can’t drive over, like large rocks, or particularly pointy rocks. One of the issues that we’ve been having with an older Mars rover is that the wheels as we’ve driven them over all these pointy and old and sharp terrains, is that the wheels are actually starting to get small holes in them and break down a little bit. And we’re trying to put off the wheels breaking down as long as we possibly can. So, part of my job as a driver is to make sure that the rover will get to where we’d like it to go and also get there in one piece.
Jim Green:Well, this sounds really fascinating. What what’s the initial set of information you use to be able to plan the route? Do you need some sort of neat images? And how do you acquire those?
Sophia Mitchell:We have a lot of different sets of images. We get some images from the Mars Reconnaissance Orbiter, and those are we call those orbital mesh. And it’s three-dimensional images in color and grayscale of the area around the Mars rover. But because it’s an orbiter, it can only zoom in so far. So for more detailed images of the specific rocks that we’ll need to drive around, or the specific sand areas that we either want to avoid or maybe investigate, we then require imagery from the rover itself.
Sophia Mitchell:And so those images are taken as we drive. And before the end of each drive, we take a picture of where the rover will be parking. So before we begin the next planning day, we then get all those images down from space. And then as rover planners, the first thing we do is load up these meshes and make what’s called a high-fidelity model, basically, a pretty precise version on our simulator of what the area of around the rover looks like and where the rover is.
Jim Green:Well, how far can you possibly go in one day? Is it typical that the scientists say I want to go here and the next day you’re there?
Sophia Mitchell:Not typically, it depends. So we have a pretty long strategic route that the science team has worked with some other planners with to plot where on the orbital map we want to go long term. But I think the furthest drive that we’ve done is just over 100 meters. I actually was one of the rover planners who did that drive.
Sophia Mitchell:And so obviously, if the scientists are interested in something that’s maybe a mile away, we’re not going to get there in one go. So, yeah, we’ll pick intermediate positions where maybe we know we’ll have a good viewshed, if it’s up on top of a little hill, maybe we’ll know we can see really far. Or sometimes scientists will say we want to go way over there. But in this image, there’s this cool rock here. And we want to go see that. So we go check out the cool rock first. So yeah, usually we go 50 to 100 meters at a time.
Jim Green:Does it take people day and night working this? Or do you do you only work during a Mars day?
Sophia Mitchell:So in the very beginning of Mars missions, you go on, go on what’s called Mars time where you wake up when the Sun would be rising with that rover, and then you go to bed at the end of the solar day. And so you’re basically getting the data as it’s coming down real time and then working with the rover as it’s going throughout its day. As the rover gets a little bit older, then you no longer need to be on Mars time. And so we have different passes for each of the satellites, that gives us data. And so, if with MSL, we can have a normal, you know, eight to five schedule, and just count on the data coming in during the night when we’re sleeping here on Earth, and be able to plan that way.
Sophia Mitchell:But one question I get a lot is if we joystick the rover, which we really don’t do, it’s basically we’re making sequences using a really specific programming language that we have for the Mars rovers. And we make a whole sequence for a day or sometimes up to three days, package that up, and then send it to Mars.
Jim Green:And of course, so Mars isn’t very close, you know, it’s sometimes between 4 light-minutes, and 22 light-minutes away. So you can’t, you can’t really joystick any of that. Well, MAHLI is one of the cameras that you work with. But MAHLI is really famous for taking selfies. So how do you do that? Is that done with one picture?
Sophia Mitchell: No, it’s not. And that’s the reason why in our selfies, you don’t see the robotic arm. Those selfies that we take are about 50 pictures that have been Photoshopped together to make the composite that is our selfie. And there’s a really cool GIF that you can find where it shows we took a video of, well, a video, we took a picture every 15 seconds of the turret as it was taking our selfie. And you can see how MAHLI pivots around this specific point in space to get this image that looks like it was taken all at once.
Jim Green:Well, what is your real favorite part of being a rover driver?
Sophia Mitchell:Ooh, that’s a tough question. It’s a lot of fun. It’s a really fun team to work with. And it’s definitely a dream. I wanted to be an astronaut since I was really small. And so the feeling that I’m controlling something on a different planet in some way feels like you know my work is going to space so in some way maybe I am. I really enjoy the problem-solving that comes with having a rover that’s aging on a different planet and having to understand how to solve those problems for a system that you can’t ever touch.
Sophia Mitchell:So, for example, the reason I came onto MSL was I was working on the feed- extended drilling team. So back in 2016, the drill broke on the rover. And we had to basically relearn how to drill on Mars. And so not only did we have to figure out why it broke and how it broke, but also how do we drill? And how do we basically reinvent this really integral part of our sampling system? And those are just the kind of questions that I like to try to answer because it sounds crazy. And that’s just, I think it sounds like so much fun.
Jim Green:I can understand how excited you can be to go to work each day. Well, how excited are you about the Perseverance landing?
Sophia Mitchell: I’m extremely excited. This is the first rover that I’ve worked on before it landed, so that’s really exciting for me personally, but also just in terms of having another rover on Mars. I mean, we had Spirit and Opportunity. And then when we lost Opportunity, it’s just been Curiosity until now. And so having a second rover going and, searching for those signs of life and continuing on with all the scientific discoveries that we can get from, from the surface of Mars, I think is really exciting.
Jim Green:Well, I know what I’m going to be doing when Perseverance lands, and that’s going to be on the edge of my seat watching the NASA feed as we go through that. What will you be doing? Will you be on center at JPL?
Sophia Mitchell:Unfortunately, I won’t, due to the pandemic, but I’ll be home watching with lots of the other Mars 2020 Perseverance team and sharing on the rover and being just as excited as everybody else to see it safely touch down.
Jim Green:Well, how did you get involved in the Perseverance team?
Sophia Mitchell:So on the Perseverance team, I’m a systems engineer for the gas dust removal tool, it actually has a tank of nitrogen. And it uses two solenoid valves to pass that nitrogen into kind of a holding chamber. So we can be sure were puffing the exact same amount each time. And then it puffs on to the surface to clean off rocks, or to clean out an abrasion area or just investigate things. And so I started working on that tool as a systems engineer because of the experience that I had with working on the feet extended drilling problem. It’s, again, thinking about how you have a robotic system interacting with the surface.
Jim Green: Oh, that sounds really exciting. Well, that means then you’re part of the perhaps that early planning phase once Percy lands, and the mast goes up, and they do some checkouts. What are some of the first things that they’re going to be doing within the first month of operation?
Sophia Mitchell:So we’ll be doing all sorts of check outs for the instruments on the robotic arm, we have a corer. we have instruments such as PIXL, SHERLOC, there’s MOXIE, which is another instrument that’ll be trying to produce oxygen on the surface. And so we have to just make sure that everything survives landing and survive cruise in a state that we were expecting. And so once we’ve gone through all those checkouts, and one of the really exciting things that’ll happen early is, before we even drive, we’ll be flying the Mars helicopter. And that is the first, that’s going to be the first powered flight on a different planet ever. So that’s just extremely exciting to me. I learned how to fly when I was little, I’ve always been obsessed with flying and I’m an aerospace engineer. So just having something go fly on a different planet, a little Mars helicopter, I’m just so excited about that.
Jim Green:Well, is driving Perseverance going to be different than driving Curiosity? Or pretty much the same?
Sophia Mitchell:They’re similar. They’re based on the same underlying programming language. However, of course, because Perseverance is a newer rover, it has more capabilities, it has more computational power, it can do what we call “thinking while driving,” where, while it’s driving, we use what’s called visual odometry to take images of the ground as we go. And the rover, Curiosity does this already, can assess if it thinks it’s slipped or not based on where rocks that it’s passing are if you know if it thinks the rock should have gone from a few inches in front of us to now right next to us. And instead it’s off to the side, we know we slipped. So. But MSL has a constraint that it can’t do that while it’s driving just because of where hardware was in 2010 through 2012 when this was built. So now that we have updated hardware on Perseverance, it can do that thinking while it’s moving, and so it can go a lot faster.
Sophia Mitchell:The other thing that’s different with Perseverance driving is the AI on board that will be able to identify hazards and rocks as it goes.
Jim Green:And AI is artificial intelligence.
Sophia Mitchell:Yes, sorry, artificial intelligence. So we have on Curiosity, what’s called auto-nav. And it’s the ability for the rover to identify hazards as it goes already and drive around them as it sees fit. But it can’t do things like determine for itself if an area is too dangerous to go in if it’s a big sand pit, so we still have to tell it that’s a sand pit over there don’t go that way. And but it keeps getting around it. But Perseverance has more capable artificial intelligence to be able to say that looks like then I’m going to maybe not go that way and make those decisions for itself.
Jim Green: Oh, that sounds great. Yeah, indeed, letting the rover make more decisions and giving it the latitude to do so is really critical, because if you don’t, then everything stops and waits for the controllers to wake up and drive into JPL for their eight-hour shift.
Sophia Mitchell:Exactly.
Jim Green: Well, Perseverance is going to land and Jezero Crater and of course, Curiosity is in Gale Crater. Are these things the same thing? Or do we expect very different terrain.
Sophia Mitchell:So there are similarities and differences between the two craters. They’re both believed to be impact craters, so that makes them similar. And they’re also places where we believe there, at one point in time, would have been water on Mars. But that’s kind of where the similarities stop as far as we know with Gale Crater, we believe it was a[n] old lake bed. So, a lot of the rocks that we see are rounded or have been pushed through different subsurface layers that have been affected by having water go through them. And then also, in Gale Crater, we have like the Vera Rubin Ridge, which has a bunch of iron in it. So you get super hard rocks there.
Sophia Mitchell: And the Jezero Crater, it is believed to have been a river delta. So you’ll still see rocks that are affected by water in this region. But they may be acting differently. And then of course, there’s going to be rocks that maybe have less water content, which could make them more brittle, or maybe not, make them, maybe be more sticky. So when we drill into them, and that stickiness interacts with the drill in a different way than the soil that we’ve seen in Gale Crater, then that’ll be an interesting thing to find out.
Jim Green: Well, you know, I think Mars rover driving is a real dream job. What do you what would you suggest for, you know, the younger crowd that’s thinking about a future and, and, and a way to get into the NASA workforce? How would they go about doing that?
Sophia Mitchell:So there’s not one specific path to becoming a rover driver. But it is important to as always focus on math and science skills. Make sure that you’re studying and things like that, but also make sure that you have a good work life balance that you do the things that you enjoy doing. I mentioned how I bring some skills from backpacking into being a rover driver. I’ve also brought in skills from being a private pilot into being a rover driver. There’s a lot of talking over radios and having to remember different information that’s being told to me very quickly and listening to two or three radios at the same time sometimes.
Sophia Mitchell:And so, there’s all these different aspects of my life that I pull into being a rover driver, [and] make me a better one. So if I only focused on, you know, just engineering period with my life, and that actually wouldn’t be great. And then also just being persistent.
Sophia Mitchell: The way that I got into doing research at University of Louisville was I literally walked into the astrophysics department with my mom, my mom, to her credit, said, this girl needs to be with people who understand what she’s talking about. I don’t know what she’s talking about my mom’s an artist, and I love her.
Sophia Mitchell: So just don’t be afraid to ask questions. Don’t be afraid to email people, knock on doors. Go say hi. More often than not, they’ll be happy that you did.
Jim Green:So, Sophia, I always like to ask my guests to tell me, what was that event? Or was it a person, place or thing that got them so excited to become the engineers they are today? And I call that event a gravity assist. So Sofia, what was your gravity assist?
Sophia Mitchell: So, my gravity assist, I think, was my sixth grade science fair. I’ve been interested in space, since, probably since I was born, And when I was in middle school, we had to do science fair, it was mandatory. And I didn’t really take it seriously.
Sophia Mitchell: My first science or project was on the tenacity of hair. So I had cut some of my hair, put it in creek water from our creek in our yard in Kentucky, put some in some pool water, put some in some tap water, and tried to see when hair broke. And I thought I did a good job.
Sophia Mitchell: And we get to science fair. And my teacher told me, “This needs to have a better purpose.’ And looking back, I realized that she just meant I should rewrite my purpose. But at the time, I took that to mean, this project doesn’t have a purpose, like, what are we going to do with the tenacity of hair? That’s not really helping people. Why are we looking at this? And so, I started to think about how could I take this research process, the scientific process that I was learning about, and apply it to something that I really, really enjoy?
Sophia Mitchell: I was just so like, determined, because I had this teacher say, “your project has no purpose.” And I was just so upset by that. I wanted to prove her wrong. And so the next year, my project was finding a correlation between sunspot count and global mean temperature.
Sophia Mitchell: And there really wasn’t a huge correlation there. But it started getting me to think about the bigger questions that we can answer with science and trying to figure out how to make that more accessible and so yeah, I ended up moving on to looking at solar flare size compared to sunspots and proton density in the solar wind compared to solar flare size. I had started getting data from Ace observatory went to International Science Fair which for anybody listening it’s completely worth it go crazy with science fair because International Science Fair is extremely fun, I went twice. That’s how I ended up then working at the University of Louisville in the astrophysics department. So it really just exploded from angry at the sixth grade science fair into getting published in the Monthly Notices for the Royal Astronomical Society. Yeah, I was really determined. I went knocked on a lot of doors and that’s how I got where I am now.
Jim Green:Well, Sophia, thanks so much for joining me in discussing this fascinating topic, how we work on Mars.
Sophia Mitchell: Yes, and thank you again for having me. I’ve really enjoyed talking with you today.
Jim Green:Well, join me next time as we continue our journey to lift up the hood and look inside of the activities that NASA does to make fantastic missions happen. I’m Jim Green, and this is your Gravity Assist.
Credits:
Lead producer: Elizabeth Landau
Audio engineer: Manny Cooper