




















Ana Diaz Artiles
Texas A&M Engineering Experiment Station
NIAC 2019 Phase I Diazartiles Smartsuit
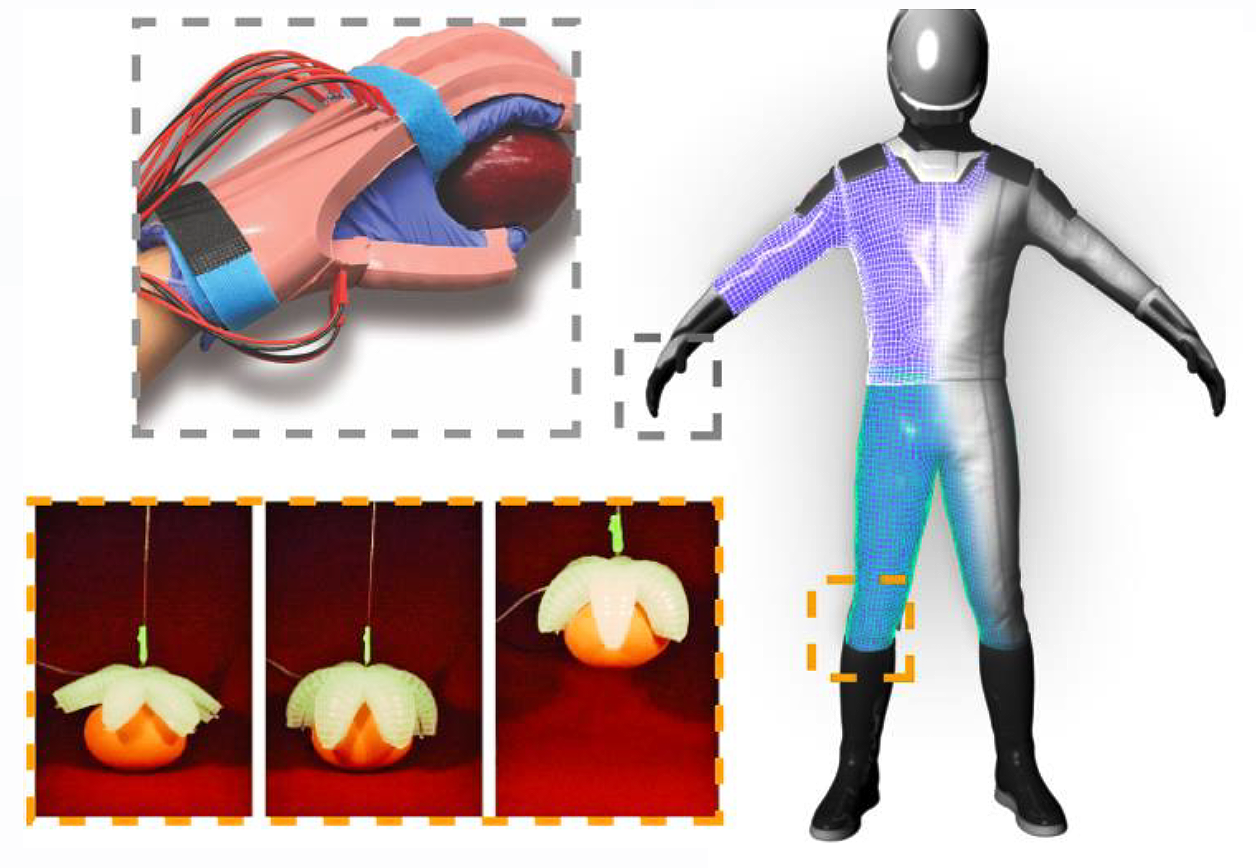
We propose a novel spacesuit intelligent architecture for extravehicular activity (EVA) operations on Mars and other planetary environments that increases human performance by an order of magnitude on several quantifiable fronts for exploration missions. The proposed SmartSuit spacesuit, while gas-pressurized, also incorporates soft-robotics technology that allows astronauts to be highly mobile and better interact with their surroundings. The spacesuit also incorporates a soft and stretchable self-healing skin (or membrane) located in the outer layer that not only protects the astronaut but also collects data through integrated, transparent sensors embedded in the membrane. These sensors are capable of visually displaying environmental and membrane structural information, providing visual feedback to the wearer about the surroundings.
The hybrid and intelligent spacesuit proposed will be designed with the philosophy of enhancing motion and dexterity, reparability and sensor integration to interact with the soundings and detect damage. The proposed hybrid technology adding full-body softrobotic elements to the gas-pressurized spacesuit will enable enhanced dexterity, increased comfort, and a feeling of normalcy that will facilitate both scientific and exploration operations on planetary missions like those expected for Mars’ surface. Additionally, the soft-robotic layer has the potential to provide some level of mechanical counterpressure (MCP) to the wearer, thus decreasing the gas-operating pressure within the suit, therefore reducing the time needed for pre-breathing protocols while enhancing even more the mobility, which has a direct impact on the duration, metabolic cost, and fatigue associated with an EVA. We expect the proposed spacesuit technology to also reduce the numerous spacesuit-fit injuries and discomfort experienced by present astronauts due to the current highly pressurized spacesuits with no robotic assistance. Our proposed spacesuit significantly improves on the state of the art in spacesuit design, addressing many issues in surface mobility, reparability and re-usability, safety, EVA preparation time, EVA duration time, and both physical and psychological fatigue. The Phase 1 effort constitutes advancement of this concept from TRL 1 to TRL 2.
The proposed project will investigate the trade-space of materials and sensor architectures, leading to design principles and sizing estimates of a candidate spacesuit. We propose to prove its feasibility and whether SmartSuit will achieve the science and exploration objectives articulated in the current Mars Design Reference Architecture 5.0. At the end of the phase I, we will outline the SmartSuit system design and concept of operations, including rationales for material, sensor, and display technology selection. It will also detail the layer breakdown and composition of such a suit. PI Diaz Artiles will lead the mission architecture work of this study, including a comprehensive biomechanical and human performance analysis. Co-I Shepherd will analyze material and mechanical metrics for manufacturing the SmartSuit and will also perform preliminary experimental validation of its core concepts (i.e. joint torques and MCP measurement, basic locomotion, relevant environmental sensing and display, and environmental stability).
2019 Phase I, II, and III Selections



