



















The Dynamics Skills Training (DST) Technology Lab develops crew training systems for dynamics operations such as robotic arm operations and ISS visiting vehicle capture and docking. A DST incorporates a toolset allowing an instructor to build, deploy, and evaluate crew training scenarios
A Dynamic Skills Trainer (DST) is typically a single workstation system, deployed with varying sets of integrated hardware – including a Display and Control Panel (DCP), flight laptops, and hand controllers. However, a DST can be deployed in larger facilities (such as the SES Alpha Dome). DSTs are deployed at across JSC, KSC, and at International Partner (IP) training facilities in JAXA, ESA (Germany), and Star City (Russia
Products
Robotics On-Board Trainer (ROBoT)
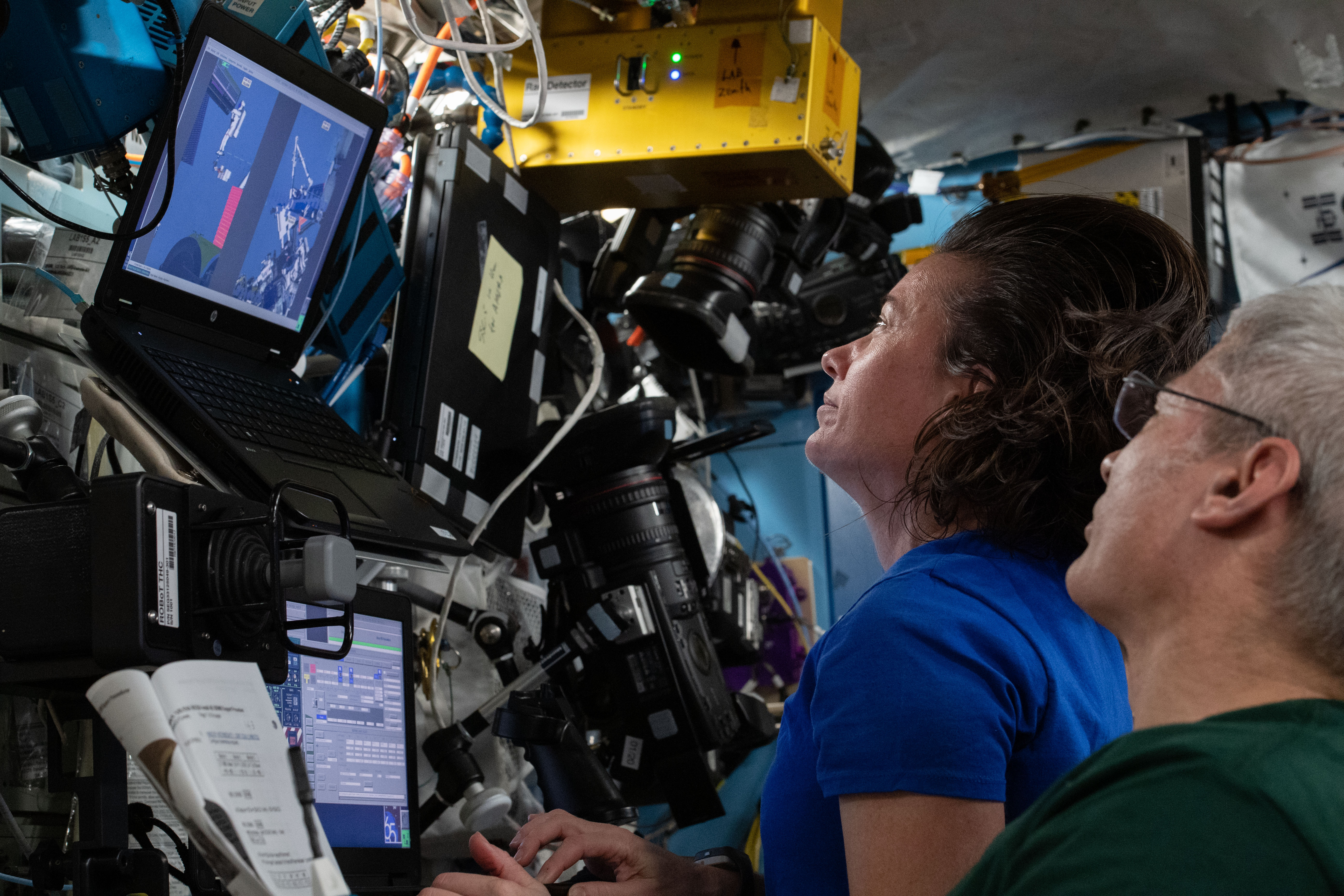
ROBoT is a DST system that is deployed to the ISS and runs on 2 flight laptop computers. ROBoT is used to prepare crewmembers for visiting vehicle capture and general Extra-Vehicular Activities (EVAs), as well as for Robotics skills certification.
In addition to on-board ISS, ROBoT systems have been deployed at JSC training facilities, long term habitat analogs (HERA, CHAPEA, NEK in Russia, Niemeyer Station in Antarctica), a portable version deployed on the post-ISS-landing crew return aircraft (ROBoT on a plane), and a rack to mount ROBoT on the parabolic aircraft operated by Novespace in France.
Track and Capture (T&C) Tool
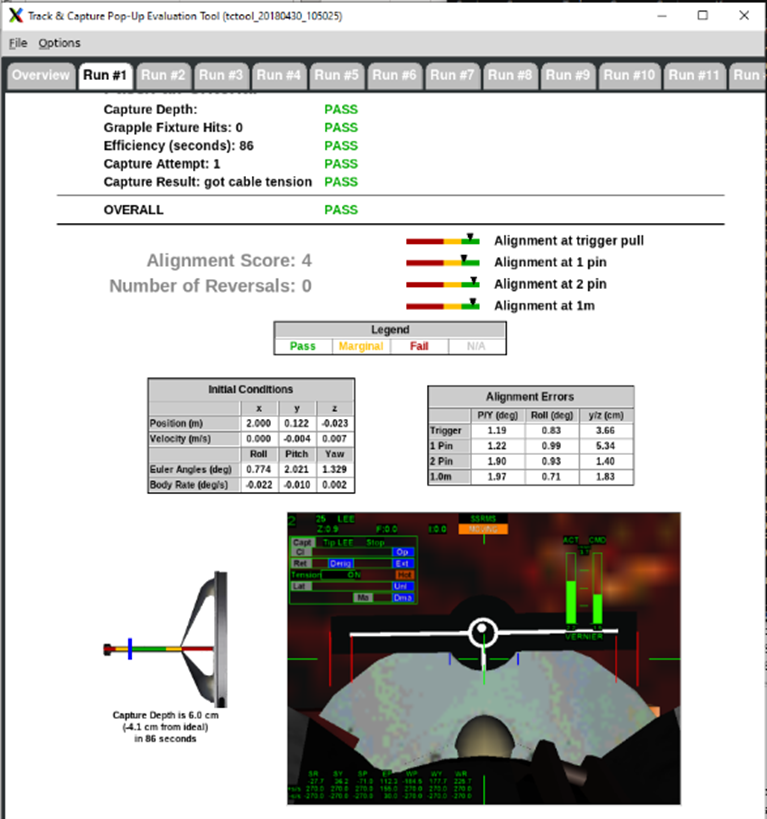
The T&C Tool was developed with an eye toward instructorless training on long term space flights. Working with instructors to capture their scoring methods, the T&C Tool provides an overall numeric score, and scoring on almost 20 subcategories, for robotic arm capture tasks. The tool presents a scoring sheet to the user at the end of each task. In addition to allowing crew member self-study during available free time on board ISS, the T&C Tool has been valuable for the Human Research and Performance (HRP) program.
To support HRP studies, the T&C Tool collects a baseline score for a study participant. The subject is then subjected to a stressor (such as lack of sleep), and a new score collected. Score variance informs performance tracked in the study.
SimAudio
The SimAudio tool provides the capability to enhance a simulator by adding real time 3 dimensional sounds driven by the simulation. Using an XML or JSON configuration file, a developer is able to define simulation variable events and basic rules that will act as audio cues to play specific sounds (i.e. jet firings, Rover motor sounds).
ROBoT makes use of SimAudio to provide the ‘Virtual M2’ functionality. This plays the role of a second crewmember during self-study, providing spoken work cues to crewmember, as if a second crewmember is present.