



![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)









Armstrong is contributing to NASA’s Roadmap for Robotics, Tele-Robotics, and Autonomous Systems through research in a wide range of areas, such as artificial intelligence, advanced flight control laws, new testing methods, collision avoidance technologies, and much more.
Armstrong’s pioneering research into lifesaving collision avoidance technologies has the potential to be applied beyond aviation and could be adapted for use in any vehicle that has to avoid a collision threat, including aerospace satellites, automobiles, marine vehicles, and more.
AI-Enabled Small UAS
Drone technology developed at Armstrong aided rescue and recovery efforts in Texas following Hurricane Harvey in 2017. Engineers are now evaluating this technology for use at aircraft crash scenes, which can be dangerous to rescue personnel due to hazardous cargo, flammable and toxic liquids, and adverse terrain. The technology uses artificial intelligence (AI) and an advanced camera system to detect and classify objects during flight and store those objects and their locations in a local Earth geo-browser. The goal is for an AI-enabled unmanned aerial system (UAS) to locate survivors, aircraft debris, and key flight recording instrumentation and then geo-tag all elements of a crash site to create a debris map.
Work to Date
NASA conducted a staged mishap exercise in November 2018 at Mojave Air and Space Port to explore the use of an AI-enabled small UAS to locate the aircraft’s flight black box instrumentation. Researchers achieved a drone live video feed to Armstrong at 2.5 megabits per second speed and 30 frames per second frequency with a 3-second lag via an LTE mobile Wi-Fi hotspot. In addition to successfully locating the black box, the technology achieved further development in two key areas: UAS vision-based object detection and classification using AI algorithms and live stream using 4G/LTE.
Looking Ahead
The collaborative research team is working to demonstrate a similar system on larger UAS platforms.
Partner
Mojave Air & Space Port
Benefits
- Enhances safety: Enables drone-based disaster response and real-time detection of aircraft debris, survivors, and flight instrumentation
- Real-time information: Provides live stream video to research and rescue organizations
Applications
- Aviation mishap investigations
- Search-and-rescue operations
- Damage assessment
- Surveillance and security
PI: Ricardo Arteaga | 661-276-2296 | Ricardo.A.Arteaga@nasa.gov
Ground Collision Avoidance

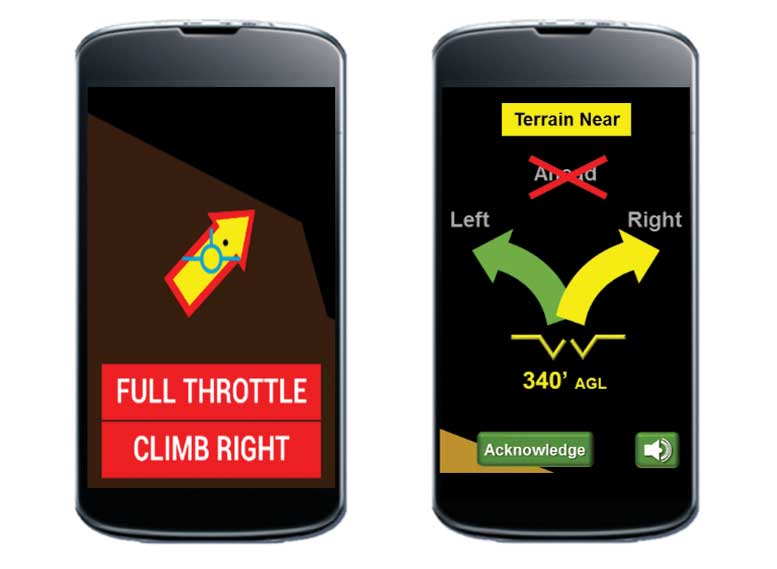
Armstrong’s improved Ground Collision Avoidance System (iGCAS) leverages leading-edge fighter jet safety technology, adapting it to civil aviation use as an advanced warning system. It offers high-fidelity terrain mapping, enhanced vehicle performance modeling, multi-directional avoidance techniques, efficient data-handling methods, and user-friendly warning and cuing systems. The algorithms in Armstrong’s technology have also been incorporated into an application for mobile devices that can be used by pilots in the cockpit, enabling significantly safer general aviation. This feature will give pilots access to this lifesaving safety tool regardless of the aircraft type. The system can also be incorporated into electronic flight bags (EFBs) and avionics systems.
The payoff from implementing the system, which was designed to operate on a variety of aircraft (e.g., military jets, unmanned aircraft, general aviation airplanes) with minimal modifications, could be billions of dollars and hundreds of lives and aircraft saved. Furthermore, the technology has the potential to be applied beyond aviation and could be adapted for use in any vehicle that has to avoid collision threats, including satellites, ships, automobiles, scientific research vehicles, and marine charting systems. Armstrong’s iGCAS can be used for a wide variety of aircraft, including general aviation, helicopters, and unmanned aircraft. The technology has been incorporated into an application for tablets and other handheld/ mobile devices.
Award Winner
The Auto GCAS technology—which NASA has been expanding to support non-fighter aircraft as iGCAS—was awarded the 2018 Robert J. Collier Trophy by the National Aeronautic Association. The prestigious award is presented annually for the greatest achievement in aeronautics or astronautics in America. A committee of 30 aviation and aerospace professionals selected the team as the recipient for the development, integration, and test of the proven, life-saving technology. The 8-foot- high Collier Trophy arrived from the Smithsonian National Air and Space Museum to honor the team for the historic win.
Work to Date
This improved approach to ground collision avoidance has been demonstrated on small unmanned aircraft, a Cirrus SR22, and an experimental Cozy Mark IV aircraft while running the technology on a mobile device. These tests proved the feasibility of the mobile app–based implementation. The testing also characterized the flight dynamics of the avoidance maneuvers for each platform, evaluated collision-avoidance protection, and analyzed nuisance potential (i.e., the tendency to issue false warnings when the pilot does not consider ground impact to be imminent). In 2019, under the Resilient Autonomy effort, the team integrated the system with a commercially available MGL Avionics unit and began flight tests on Langley’s Lancair aircraft. Flight tests will continue into 2020 and the system will be integrated with an air collision avoidance capability.
Looking Ahead
Future versions of the technology may employ a phone’s wireless capabilities to connect it to an airplane’s autopilot system. It could one day exploit a phone’s built-in location sensors to make a wireless or USB connection completely unnecessary. The Armstrong team is also working with avionics manufacturers to integrate iGCAS software into their systems.
Partner
NASA’s Langley’s Research Center
Benefits
- High-fidelity terrain mapping: Armstrong’s patented approach to digital terrain encoding enables the use of maps with fidelity that is 2 to 3 orders of magnitude better than existing systems.
- Flexible platforms: This tool can be used with a variety of aircraft, including general aviation, helicopters, unmanned aircraft, and fighter jets such as the General Dynamics F-16, with the ability to incorporate the specific maneuvering performance for each aircraft type into the platform.
- Nuisance-free warnings: The iGCAS technology ensures that alarms will be triggered only in the event of an impending collision, reducing the risk of false alarms that may cause pilots to ignore the safety system.
- Multi-directional maneuvers: Unlike existing systems that recommend only vertical climbs, this innovation can recommend various turns to avoid a collision, making it more appropriate for general aviation and unmanned aircraft.
- Proven technology: A follow-on to a system currently flown in F-16 test aircraft will be integrated into the aircraft’s next generation for the U.S. Air Force’s fleet.
Applications
- General aviation
- Military aircraft
- Drones/Unmanned aircraft
- Helicopters
- Digital autopilots
PI: Mark Skoog | 661-276-5774 | Mark.A.Skoog@nasa.gov
Resilient Autonomy

Armstrong researchers are leading an effort to develop a framework for autonomous aircraft that the Federal Aviation Administration (FAA) could leverage to establish certification standards. The goal of the Resilient Autonomy effort is to create a robust methodology for evaluating unmanned and autonomous systems using an approach known as Multi-Monitor Run-Time Assurance (MM-RTA). The approach uses open access expandable variable-autonomy architecture (EVAA) software testbeds to ensure safe operations. The framework coordinates various functionalities with risk-based logic, safely binding untrusted behavior and relieving the requirement to certify all guidance logic possibilities. EVAA is structured to allow the addition and removal of monitors, sensors, and aircraft models with a minimum of validation and verification requirements.
Work to Date
In 2019, the Office of the Undersecretary of Defense for Research and Engineering funded Resilient Autonomy to further EVAA development. The goal is to integrate EVAA onto multiple unmanned aircraft as well as general aviation aircraft. Safety features within EVAA are being expanded to include geo-fence, well clear, obstacle spacing, ground and obstacle avoidance, air traffic avoidance, in-flight route re-planning, and emergency forced landing.
Looking Ahead
Researchers are finalizing plans for two technology demonstrations designed to test and validate the framework. In summer 2021, the team plans to autonomously fly a drone from Armstrong through the airspace over rural areas to Camp Roberts, a National Guard post in central California. The demonstration will exercise terrain, obstacle, and air collision avoidance capabilities. The FAA could leverage safety documentation developed from the demonstration as a certification pathway.
Additional demonstrations will be conducted between Edwards and China Lake showcasing EVAA’s ability to react to emerging situations and either safely conduct a mission or abort a mission and autonomously initiate a return to base. In conjunction with the EVAA development and testing, the team will work with the FAA to develop a certification approach for autonomous aircraft
Partners
FAA, Department of Defense, Terra Pixel, Amazon Prime Air, Skyward, Scientific Applications & Research Associates (SARA), U.S. Southern Command, U.S. Special Operations Command, and Air Force Research Laboratory
Benefits
- Revolutionary: Research will inform standards and best practices that will accelerate the certification of autonomous systems.
- Reliable: Approach uses supervisory control as a deterministic trustworthy way to ensure safety.
Applications
- Unmanned aerial vehicles (UAVs)
- Unmanned submersibles
- Autonomous rail transport
- Deep space exploration
- Driverless vehicles
PI: Mark Skoog | 661-276-5774 | Mark.A.Skoog@nasa.gov
UAS Integration in the NAS

The Unmanned Aircraft System (UAS) Integration in the National Airspace System (NAS) project is a multi-center research project that is developing operational concepts and technologies to aid in establishing and evaluating performance standards with industry to make it possible for unmanned aircraft to fly routine operations in U.S. airspace. Unmanned aircraft offer new ways of increasing efficiency, reducing costs, and enhancing safety. As new uses for these vehicles are considered, project partners are working to overcome safety-related and technical barriers to their use, such as a lack of detect-and-avoid (DAA) technologies and robust communications systems.
Providing critical data to such key stakeholders as the Federal Aviation Administration (FAA) and the RTCA Special Committee 228, the project is conducting system-level tests in a relevant environment to address safety and operational challenges. The project falls under the Integrated Aviation Systems Program in NASA’s Aeronautics Research Mission Directorate.
The project’s research continues to address two technical challenge areas:
- Develop DAA operational concepts and technologies in support of standards to enable a broad range of UAS that have communication, navigation, and surveillance (CNS) capabilities consistent with instrument flight rules (IFR) operations and are required to detect and avoid manned and unmanned air traffic
- Develop satellite and terrestrial-based command and control (C2) operational concepts and technologies in support of standards to enable the broad range of UAS that have CNS capabilities consistent with IFR operations and are required to leverage allocated protected spectrum
Another technical activity, System Integration and Operationalization (SIO) is working toward routine commercial UAS operations in the NAS by integrating DAA and C2 technologies; obtaining approval to operate in the NAS for a flight demonstration in 2020; working toward type certification; and sharing lessons learned with the UAS community.
Work to Date
Armstrong’s contribution to the project includes overall project management and integrated test and evaluation functions.
The first phase research portfolio (2011–2016) was successfully completed and addressed larger UAS transitioning through the NAS encountering both cooperative (i.e., equipped with a means of electronic identification, such as a transponder or ADS-B) and non-cooperative traffic. These activities provided critical research and flight test validation that culminated in the release of RTCA Minimum Operational Performance Standards (MOPS), which were then translated into FAA Technical Standard Orders for UAS DAA, airborne radar, and C2 systems.
With the release of the Phase 1 UAS DAA standards, Armstrong successfully presented a safety case and in June 2018 conducted a No-Chase Certificate of Authorization flight demonstration
in non-segregated airspace with its Ikhana UAS group. This demonstration showcased an alternate means of compliance with the federal see-and-avoid requirements, employing only onboard DAA capabilities. This activity was recognized with the Aviation Week Network’s Laureate Award for Commercial Aviation in the Unmanned Systems category in 2019.
The second phase research portfolio (2017–2020) is addressing expanded operations in the NAS for a broader class of UAS. These activities are refining the UAS DAA MOPS and expanding to include extended operations in the NAS as well as approach/ departure operations in the terminal area for both large and mid-size UAS. Armstrong’s Phase 2 activities include the design and integration of low size, weight, and power (SWaP) DAA systems onto a mid-size TigerShark XP UAS to enable flight test development of a low SWaP airborne radar and provide validation data for Phase 2 MOPS. These flight test activities wrapped up with the employment of the live, virtual, and constructive (LVC) distributed environment to immerse multiple U.S. Air Force UAS pilots in an operational scenario flying a mid-size UAS encountering cooperative and non-cooperative traffic.
Looking Ahead
In 2020, the effort will incorporate results into a standards document that will inform FAA UAS integration policies and operational procedures, document the work that has been completed, and close out the project. Lessons learned are being applied towards SIO activities to support its milestones.
Collaborators
Federal Aviation Administration; RTCA; General Atomics Aeronautical Systems; Bell; PAE ISR; Navmar Applied Sciences Corporation; Honeywell Aerospace; Collins Aerospace; LinQuest Corporation; Virginia Tech Mid-Atlantic Aviation Partnership; Northeast UAS Airspace Integration Research (NUAIR); MIT Lincoln Laboratory; Air Force Research Lab; and NASA’s Ames, Langley, and Glenn Research Center
Benefits
- This DAA, C2, and vehicle-level research will provide information to the FAA as it develops policies and procedures to integrate UAS into the NAS.
- The research will advance MOPS for UAS and low SWaP airborne radar models.
PI: Clint St. John | 661-276-5306 | Clint.W.St.John@nasa.gov
Miniaturized Radar for Small UAS
Armstrong innovators are developing a miniature collision avoidance radar sensor for small UAS. Currently, commercial use of small UAS in the National Airspace System (NAS) is constrained by regulatory issues based on multiple safety concerns, some of which this technology addresses. This radar sensor is small, lightweight, and compact so that it can fit easily onto a drone. It is designed to determine the range, speed, and location of multiple hazards in real time and alert the drone to avoid a collision. The sensor operates day or night and in all weather conditions, detecting both cooperative and non-cooperative hazards. It can also transmit data to a ground station where operators can make flight decisions.
Work to Date
Researchers completed a miniature prototype along with custom calibration setup and processing and real-time monitoring software. The team also successfully completed four manned aircraft flight tests, during which the radar successfully detected and tracked a Cessna-172. NASA received a patent for the technology in May 2019.
Looking Ahead
Next steps are to schedule unpiloted flight tests, refine the sensor design, and integrate it with an autopilot or flight director. To date, two new patent license agreements are in process for this technology, one for commercial and another for military operations.
Partner
Vigilant Aerospace Systems
Benefits
- Safe: Enhances detect-and-avoid capabilities for small UAS, increasing safety for other aircraft as well as people and property on the ground
- Enabling: Provides critical situational awareness for operation of UAS in the NAS
- Reliable: Operates day or night; in rain, fog, and clouds; and more reliably than sensors based on cameras or lasers
- Lightweight and compact: Weighs just 32 ounces and measures 4x3x4 inches
Applications
- Package delivery
- Search and rescue
- Surveillance
- Scientific research
PI: Ricardo Arteaga | 661-276-2296 | Ricardo.A.Arteaga@nasa.gov
Urban Air Mobility

NASA is leading a national effort to develop technologies and analysis methods for small (four to six passengers) electrically powered aircraft—a key component to the emerging concept of Urban Air Mobility (UAM). UAM envisions a safe and efficient air transportation system where electric air taxis and air ambulances operate alongside small-package delivery drones above populated areas.
In traditional aircraft, the propulsion and flight control systems operate independently. Electric vertical takeoff and landing aircraft—known as eVTOL—instead use the same electric motors for both propulsion and flight control. A team of Armstrong researchers is studying how electric motors, batteries, and the merging of propulsion and flight controls could affect the way aircraft are designed, tested, and certified. The goal at Armstrong is to improve the safety and reliability of this new class of air vehicles by developing innovative tools and methods, and by contributing to the evolving standards, guidelines, and best practices for the industry.
Research at Armstrong began in 2019 and is focused on three areas: optimal control allocation, stability of integrated flight control and electric propulsion, and pilot-aircraft interaction models.
Optimal Control Allocation
Aircraft with many control effectors, such as the multiple rotors of an eVTOL air taxi, offer a great deal of flexibility in how the vehicle is controlled. The Armstrong team is developing a novel control allocation method to be tested in the simulation of a NASA-developed six-passenger eVTOL concept aircraft. The control allocation research seeks to simultaneously maintain the aircraft’s flight path while accommodating failures, optimizing energy efficiency, and ensuring that powertrain components stay within their temperature limits—all while taking into account external conditions like weather and traffic.
Stability of Integrated Flight Control and Electric Propulsion
The combined voltage, power, weight, and thermal characteristics required for eVTOL aircraft are prompting the development of brand-new classes of electrical components. These components will be nonlinear, highly distributed, and dynamically coupled with the aircraft’s flight control system, leading to the need for new system-level stability analysis techniques and robustness standards. The Armstrong team is developing modeling methods for distributed electrical propulsion components and investigating techniques to analyze the stability and robustness of integrated flight control and power systems.
Pilot-Aircraft Interaction Models
Some studies predict that UAM operations could lead to as much as a 50 percent increase in demand for commercially rated pilots, leading to a severe shortage of qualified individuals. Several companies developing eVTOL aircraft have proposed that automation could be used to reduce the training requirements for pilots, and in some cases eliminate the need for a pilot entirely. The Armstrong team is studying the interaction of mathematical models of human pilots and various eVTOL concepts to better understand aircraft handling qualities and UAM pilot training requirements. The team is also developing technologies to aid the pilot and/or autopilot in staying within the aircraft’s envelope safety limits.
Benefits
- This research effort is pioneering new concepts in the field of distributed electric propulsion and will provide the community with new tools, methods, and guidelines to help ensure passenger safety and acceptance of a potentially revolutionary advance in human transportation.
PI: Curtis Hanson | 661-276-3966 | Curtis.E.Hanson@nasa.gov
Digital Terrain Maps
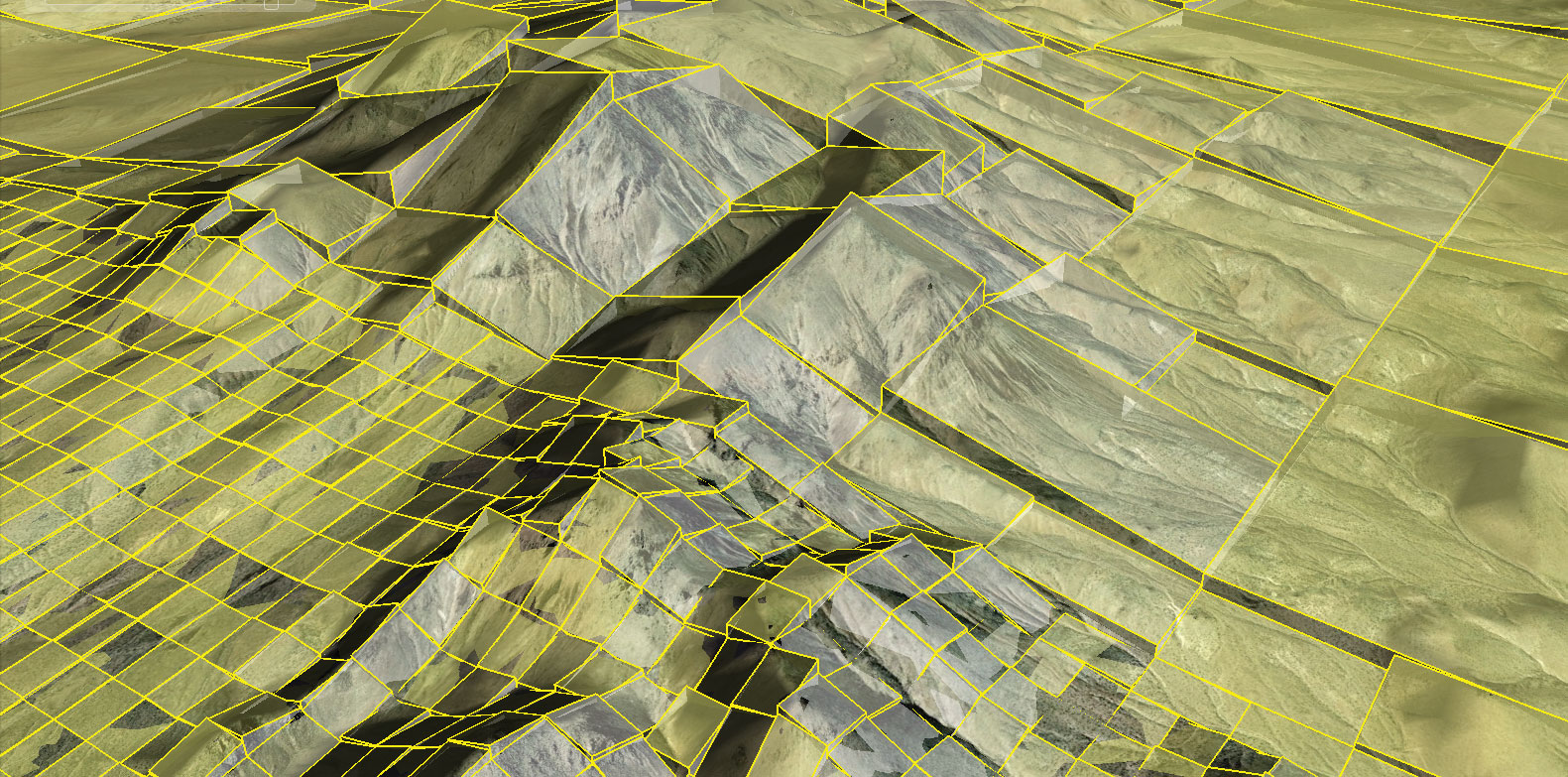
Data-adaptive algorithms are the critically enabling technology for Armstrong’s Global Elevation Data Adaptive Compression System (GEDACS) and automatic collision avoidance system efforts. These Armstrong-developed algorithms provide an extensive and highly efficient compression capability for global-scale digital terrain maps (DTMs) along with a real-time decompression capability to locally render map data. These terrain maps and decompression algorithms are designed to be easily integrated into an aircraft’s existing onboard computing environment or into other mobile embedded environments, such as smart phones or tablets, without the need for external data download. The GEDACS software package enables developers to create maps containing multiple user-defined geographical areas with custom fidelities from a variety of data sources. GEDACS provides this ability with a single, easy-to-use graphical user interface; simple map definition; and data selection procedures.
Work to Date
DTMs created with the GEDACS software have been flown and tested on aircraft avionics systems and other mobile embedded applications.
Looking Ahead
Maps developed using GEDACS are being considered for advanced automotive and space applications that require large areas of digital terrain information
Benefits
- Efficient: Provides high compression ratios (thousands to 1 for most map requirements)
- Powerful: Integrates and processes more than 250 billion separate pieces of terrain information into a single decompressed DTM
- Highly configurable: Enables users to input requirements to create compressed DTMs
Applications
- Military and civil aeronautics
- Unmanned aerial vehicles
Autonomous Piloting System
Effective multi-level autonomous piloting systems (MAPS) require integration with safety-critical functions. The MAPS project seeks to develop a hierarchal autonomous system framework that will depend on deterministic systems with higher authority to protect against catastrophic piloting faults and allow a lower level certification for the machine learning sub-systems. The multi-layered approach provides the framework for analytical systems that can learn, predict, and adapt to both routine and emergency situations.
Work to Date
The hierarchical decision chain and framework, hardware, and embedded processing related to ground collision avoidance is in place for a sub-scale platform. Flight tests on a quad-rotor model helicopter demonstrated successful limitation of flight decisions when facing imminent ground collision.
Looking Ahead
The team is developing a full set of safety-critical functions for the sub-scale platforms and working to scale up to larger UAVs.
Partners
University of California at Berkeley and Stanford University are developing algorithms, and the FAA is participating in the certification process.
Benefits
- Safe autonomous flight techniques
- Automatic collision avoidance technologies
Applications
- UAVs and unmanned submersibles
- Autonomous rail transport
- Deep space exploration
- Driverless vehicles
Peak-Seeking Control
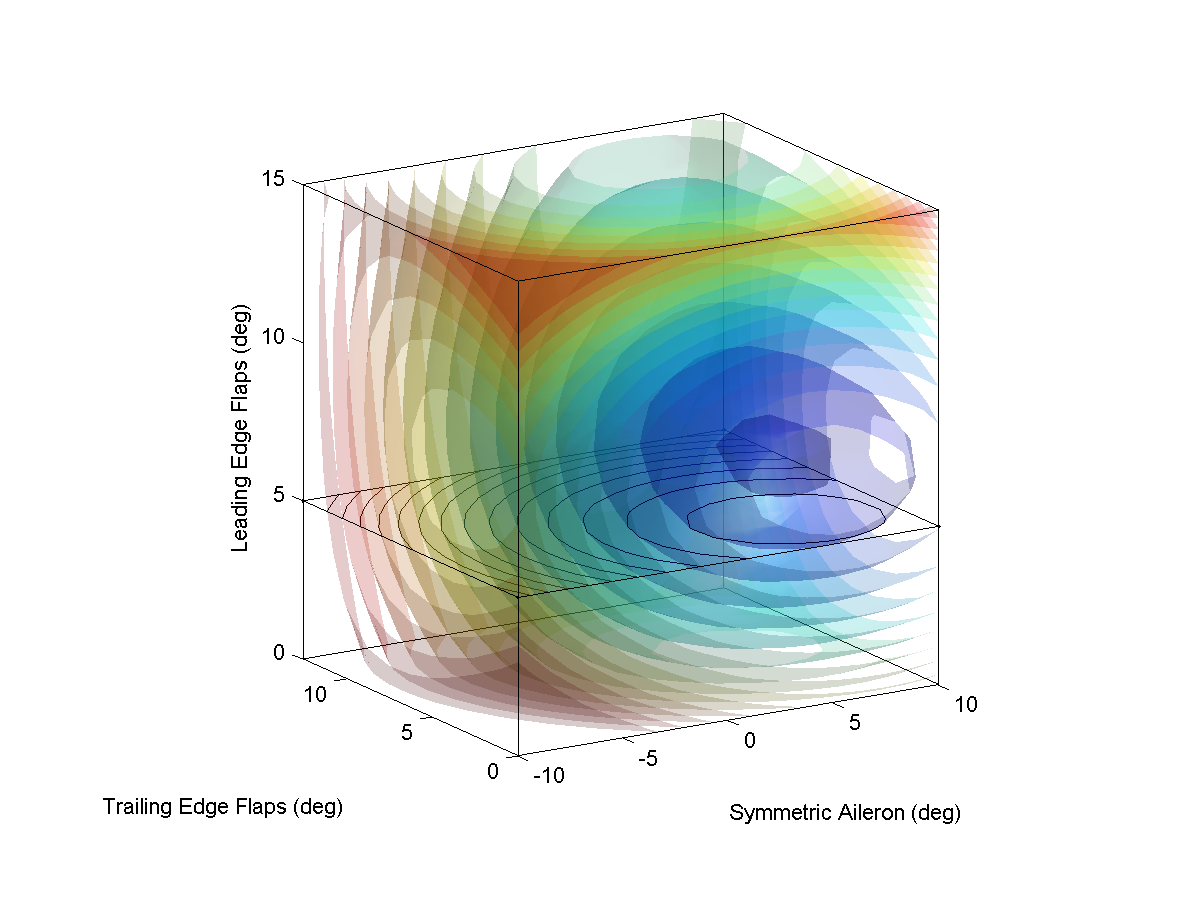
Innovators have developed a peak-seeking algorithm that can reduce drag and improve performance and fuel efficiency by optimizing aircraft trim in real time. The algorithm determines a unique trim position for an aircraft by employing a time-varying Kalman filter to estimate the gradient of a performance function using in-flight measurements. Existing trim control systems preprogram position data into an aircraft’s computer, based on knowledge gained from test flights and wind tunnel experiments. In contrast, this innovation determines in real time the most fuel-efficient trim surface position by taking into account actual flight conditions and an aircraft’s physical condition. This customized approach results in maximum fuel efficiency for each particular aircraft.
Work to Date
The Armstrong team has enhanced and validated the algorithm with a series of modified F/A-18A experiments and further refined it for implementation in the Super Hornet (F/A-18 E/F) military aircraft.
Looking Ahead
Future flight research efforts will work to further mature the technology and transition it to other aircraft. In support of the U.S. Navy’s Great Green Fleet Initiative, Armstrong is helping to plan a flight test campaign for the F/A-18 E/F military aircraft, and Boeing is developing software for implementation in the aircraft’s flight control computers. A separate effort by Lockheed Martin is seeking to implement the algorithm in high- fidelity simulation software for the F-35C aircraft. The research team is also beginning a feasibility study for the U.S. Air Force focusing on the C-17 aircraft.
Benefits
- Efficient: Reduces fuel consumption and extends the operating range of aircraft
- Fast: Determines and maintains the optimum trim surface position solution within 5 minutes, despite disturbances and other noise
- Customized: Determines unique trim position using in-flight measurements
- Variable: Works on multiple effectors in multiple axes simultaneously
Applications
- Military jets and commercial airlines
PI: Nelson Brown | 661-276-5039 | Nelson.A.Brown@nasa.gov
Automated Navigation System

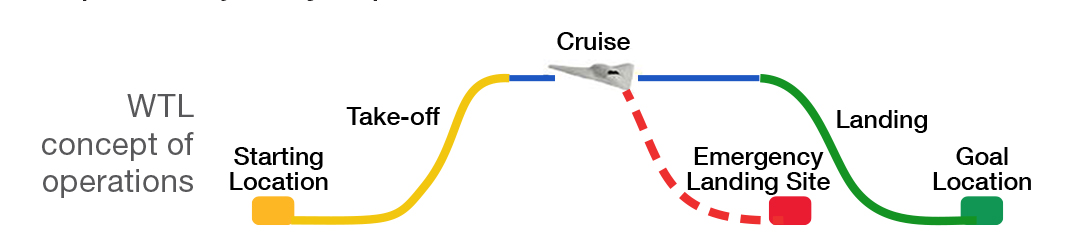
This research project is working to develop an automated navigation system that can land manned and unmanned vehicles in emergency situations, dubbed “Where to Land” (WTL). Building on an algorithm developed at the University of California at Berkeley, the system aims to mimic an expert pilot’s decision making by leveraging pre-computed trajectories using fault locations, maps, and reachable sets as well as real-time weather and vehicle occupancy data updates. The ultimate goal is to develop a system that can determine the optimal landing location that will minimize loss of life, property, and assets as well as the optimal trajectory required to reach this location.
Work to Date
Researchers have performed hardware-in-the- loop simulations and developed flight software for embedded hardware platforms. The technology provides a reachable landing site “footprint” that is applied over a map, combining population density and terrain information. The system places this footprint over a “cost map” to determine the landing site that best minimizes loss of life and property damage and then generates a trajectory to that site.
Looking Ahead
Flight tests with the algorithm implemented on an unmanned aerial vehicle (UAV) are planned for 2016. Researchers will examine how the system performs a fully autonomous emergency landing. Further work developing the third-generation WTL will incorporate the capability to handle more types of emergencies, expanded to multiple platforms and a dynamic cost map generated from real-time sensor data.
Benefits
- Effective: Provides real-time mission-driven guidance capabilities to unmanned air vehicles
- Flexible: Features a system architecture that is platform and autopilot agnostic so can be used by a wide array of aircraft
- Innovative: Allows coordination of multiple aircraft due to use of a multi-agent planning and control algorithm
- Improves safety: Provides autonomous avoidance maneuvers and/or operator warnings
- High performance: Offers a mission planning toolbox that provides situational awareness and mission management either as a stand-alone system or integrated with existing planning tools
Applications
- General aviation
- Commercial cargo and passenger vehicles
- UAVs
PI: Jinu Idicula | 661-276-2892 | Jinu.T.Idicula@nasa.gov
Automated Cooperative Trajectories
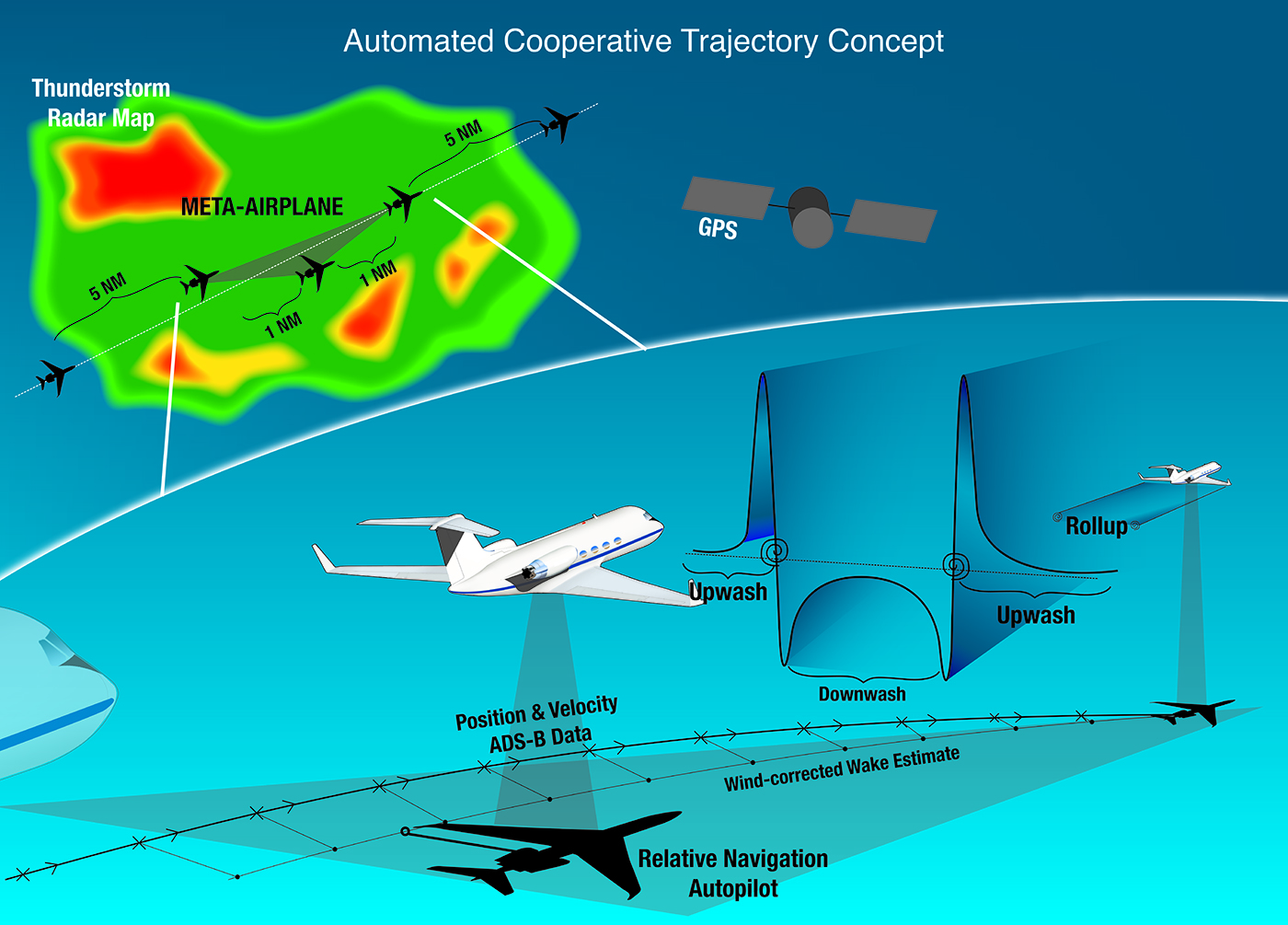
The ACT project is advancing Automatic Dependent Surveillance- Broadcast (ADS-B)–enabled autopilot capabilities to improve airspace throughput and vehicle efficiency. The concept leverages (1) meta-aircraft operations for safe, reduced separation and decreased air traffic control workload and (2) formation wake surfing for fuel savings. The concept proposes automated, distributed, multi-vehicle control using distributed knowledge of aircraft and wake locations by integrating ADS-B messages with autopilot systems.
An aircraft’s wake contains stored energy in the form of twin wingtip vortices that persist in strength for several miles behind the generating airplane. An aircraft flying on the outer edges of one of these vortices can extract energy from the upwardly moving air, increasing lift. By re-trimming to maintain level flight, the aircraft is able to maintain airspeed with a lower throttle setting, thereby reducing fuel burn by as much as 15 percent. The ultimate goal of the ACT project is to demonstrate via formation flight experiments the feasibility of automatically coordinated flight paths and significant fuel savings and then to transition those benefits to commercial cargo and passenger operations.
Work to Date
Armstrong is managing the ACT project to evaluate ADS-B data link technology to enable automated trajectory coordination, self-separation, and wake surfing. Milestones achieved to date include:
- ADS-B–enabled autopilot hardware-in-the-loop simulation
- Throttle and wake display piloted simulation evaluation
- G-III wake encounter structural analysis
- Flight test planning for 2016 research campaign
Looking Ahead
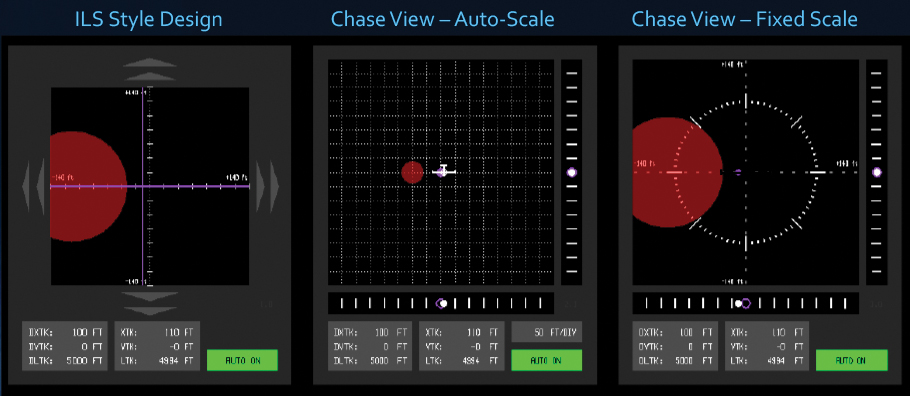
In 2016, the project will gather data using two G-III test aircraft to better understand the suitability of ADS-B as a data link for meta-aircraft procedures. An ADS-B data link will be integrated with an aircraft’s autopilot systems, and coordinated flight operations will be conducted. Additional wake surfing data will be gathered (contingent upon system performance and available resources) on passenger ride quality and performance benefits as well as to evaluate algorithms for wake prediction and estimation. This will be the first use of ADS-B as a data link for automated coordinated flight between two aircraft and the first demonstration of sustained wake surfing with a civilian business jet/transport airframe. For the first time, quantitative passenger ride quality data will be gathered during wake surfing operations.
Benefits
- Increased throughput: Reduces separation minimums between aircraft operating as a cooperative group, allowing them to safely occupy a smaller airspace footprint than under traditional flight rules
- Increased efficiency: Reduces fuel burn by as much as 15 percent
- Improved ATC workload: Allows controllers to monitor and direct several aircraft at a time—as though they were a single entity—via active communication and coordination of flight paths
PI: Curtis Hanson | 661-276-3966 | Curtis.E.Hanson@nasa.gov