
















![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/missions/a-step/FFR_Earth_Background_20251120%20.png?w=1024)











Juan Arrieta
NASA JPL
NIAC 2012 Phase I Arrieta Regolithbiters
The collective interaction of simple systems can be leveraged to attain complex goals. Based on this principle, we envision space system architectures where the core functional components are decoupled, autonomous, and cooperative. We aim to pursue this vision in the context of small-body sample-return missions. After all, no experimental study sheds more light into our understanding of the origin and evolution of the Solar System than the analysis of samples from asteroids and comets. We also believe that their study is important from a strategic perspective: meteorite impacts pose a direct and credible threat to life on Earth, and the development of contingency small-body deflection missions presupposes some knowledge of the target body.
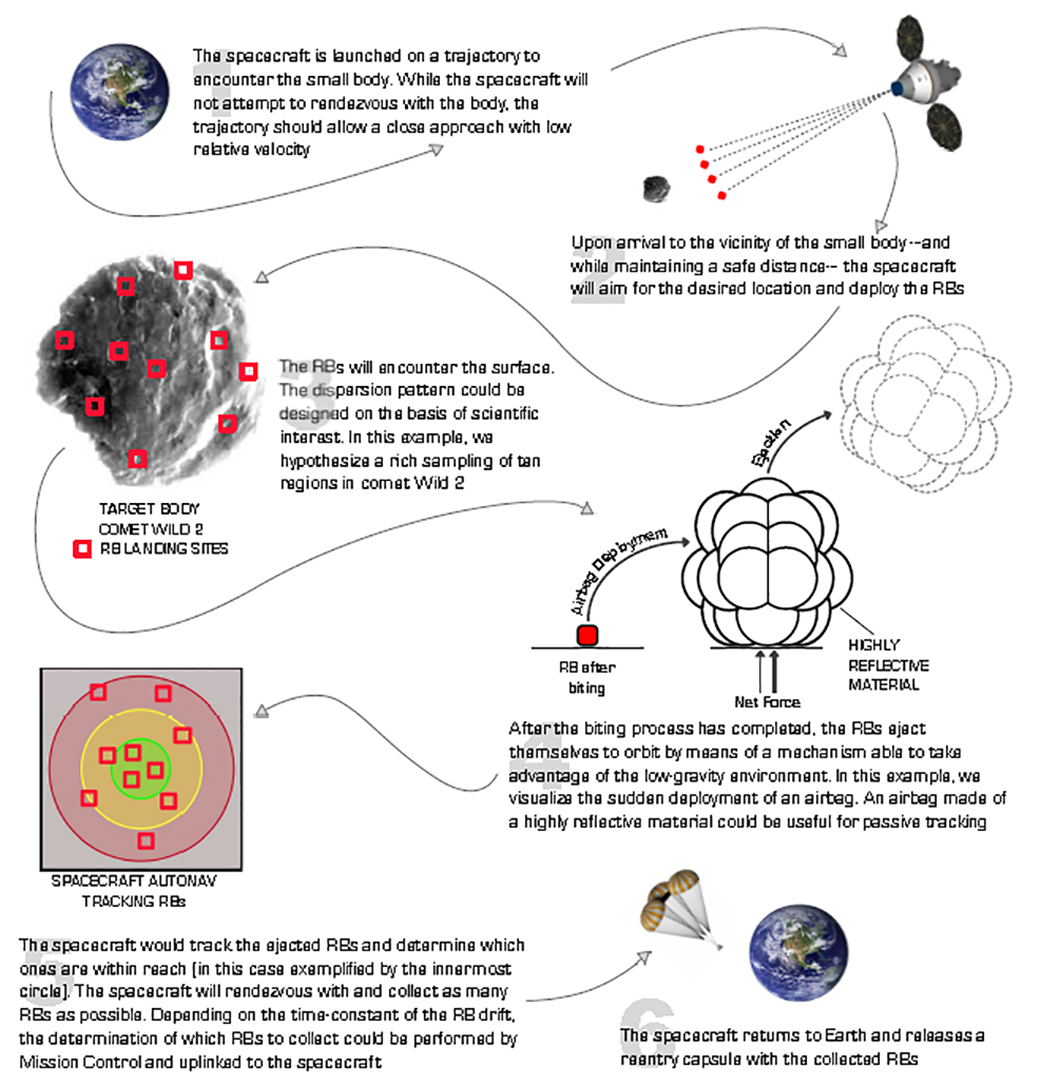
The current architectural paradigm for sample-return missions is centered around a design where spacecraft and sampling device are merged into a single, complex system. We argue that this monolithic approach couples the navigation and sample-collection problems, making both more difficult. In contrast, we propose a decoupled system based on the coordinated interaction between a spacecraft and a collective of small, simple devices–the Regolith Biters (RBs).
A spacecraft carrying a number of RBs would travel to the vicinity of a small body. From a favorable vantage point, and while remaining within a safe distance in a non-colliding trajectory, it would release the RBs towards the target body. Upon encountering the body, they would bite the regolith (thus retaining a sample), and eject back to orbit. The spacecraft, being endowed with appropriate navigation and tracking capabilities, would rendezvous with and collect those RBs within its reach, and bring them back to Earth. Separating the navigation and sampling concerns removes the need for proximity operations with the small body–the stage in current architectures that carries the most challenges and risks. Eliminating the need for proximity operations brings back to the discussion the exploration of exciting prospects, like highly active comets, fast-rotating bodies, and binary systems. Distributing the sampling problem among a collective of agents provides the opportunity to sample multiple regions in a single mission. It also provides robustness to various environmental conditions, and may enable the distributed, in situ characterization of the body. In the search for reliability, current architectures rely on complexity: an elaborate system should succeed at once. We rely on numbers: a given agent may fail at any stage, but success is attained by the collective.
The goal of the study is to demonstrate the feasibility of the architecture, and identify what key technological leaps are required as a prerequisite. As a consequence, the work plan in concerned with breadth of analysis in the interest of demonstrating feasibility. Simultaneously, we aim to integrate an expert, multidisciplinary team for further development of the architecture in later stages of this NASA Program. In concrete, our effort will concentrate of five core activities:
- Develop a CAD-based RB Proof-Of-Concept
- Delineate the population of target small bodies
- Characterize the mechanics of encounter and ejection
- Assess the performance of active and passive tracking techniques
- Explore different rendezvous and capture mechanisms
The successful demonstration of this paradigm may serve as a catalyst for innovation in other technological areas, thus shifting the technological trend from monolithic complexity to the delivery of mission robustness through simplicity and numbers. We want to inspire other mission designers and scientists to explore the applicability of this mindset to other domains.



