



















Adrian Agogino
NASA ARC
NIAC 2012 Phase I Agogino/Sunspiral Super Ball Bot Final Report
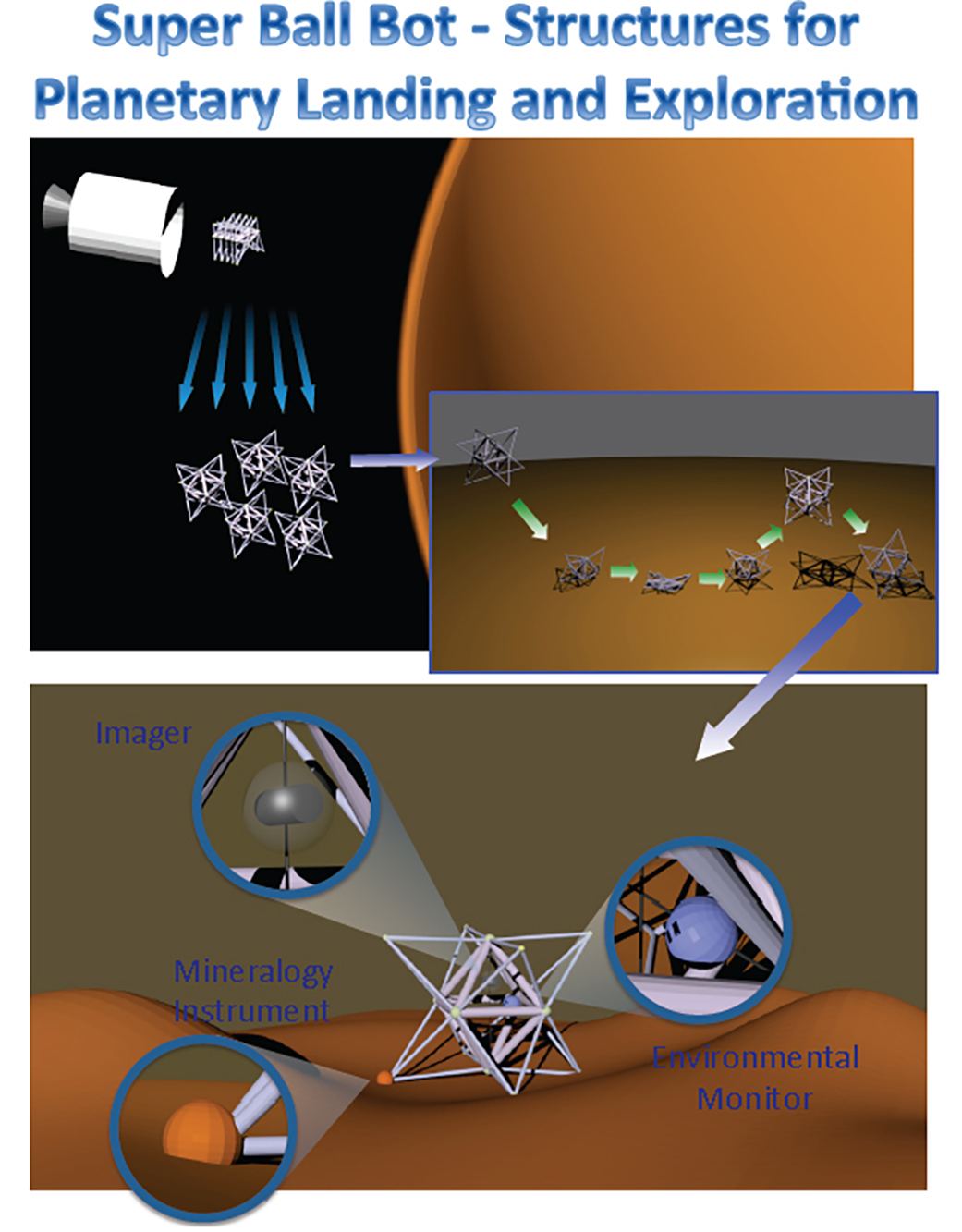
Small, light-weight and low-cost missions will become increasingly important to NASA’s exploration goals for our solar system. Ideally teams of dozens or even hundreds of small, collapsable robots, weighing only a few kilograms a piece, will be conveniently packed during launch and would reliably separate and unpack at their destination. Such teams will allow rapid, reliable in-situ exploration of hazardous destination such as Titan, where imprecise terrain knowledge and unstable precipitation cycles make single-robot exploration problematic. Unfortunately landing many lightweight conventional robots is difficult with conventional technology. Current robot designs are delicate, requiring combinations of devices such as parachutes, retrorockets and impact balloons to minimize impact forces and to place a robot in a proper orientation. Instead we propose to develop a radically different robot based on a “tensegrity” built purely upon tensile and compression elements. These robots can be light-weight, absorb strong impacts, are redundant against single-point failures, can recover from different landing orientations and are easy to collapse and uncollapse. We believe tensegrity robot technology can play a critical role in future planetary exploration.



