















Note: Please note that this is an “archived project” and is no longer updated. This article is meant for historical purposes only.

What is A-PUFFER?
Planetary exploration is currently limited to certain areas due to a lander’s inability to touchdown amidst hazards like rocks or caves or traverse challenging terrain. Sometimes the most compelling locations to study and explore are extreme landscapes. NASA’s Autonomous Pop-Up Flat Folding Explorer Robot (A-PUFFER) project developed shoe-box-sized robots to scout regions of the Moon – and possibly Mars. The small, two-wheeled robots can collect intel about locations that may be difficult for astronauts to investigate on foot, like hard-to-reach craters and narrow caves.
Each A-PUFFER robot has an onboard computer with a wireless radio for communications and a stereo camera – with multiple lenses and image sensors to sense the environment in front of it and capture 3D images The explorer bots unfold when they’re ready to scout an area. They communicate with each other and work together to create maps and identify hazards in real-time as they explore a surface. Once one A-PUFFER has mapped an area, the other A-PUFFERs will receive the map and knowledge of any rocks, slopes or other hazards.
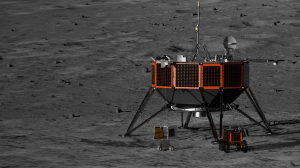
One possible application of A-PUFFER is to use this team of bots as scouts to access difficult-to-reach, or potentially risky, locations. During the launch, flight, and landing, A-PUFFERs would stow within a lander with their wheels folded inward. After a safe and successful landing, the lander would eject the A-PUFFERs. The small rovers would then “pop-up” and go off to explore and access locations of scientific interest, such as inside of a crater. Working together, these bots would use their cameras and instruments to map locations and relay their data back to the lander.
A-PUFFER technology is being used in a follow-on project called Cooperative Autonomous Distributed Robotic Explorers (CADRE), which will perform additional testing and demonstrations of the A-PUFFER technology, but in temperatures, lighting, and pressures relevant to the Moon. NASA is looking for lunar demonstration opportunities for CADRE.

Milestones
- The A-PUFFER project brought autonomy to the original PUFFER project, which developed the PUFFER hardware and demonstrated its ability to traverse extreme terrain while being operated by a person.
- The project demonstrated autonomous exploration capabilities with an A-PUFFER in June 2019 during indoor tests at NASA’s Jet Propulsion Laboratory in Southern California. During the test, an A-PUFFER successfully navigated to locations predetermined by an operator while avoiding any rocks, accurately estimating its position, and building a 2D map.
- In February 2020, a team of three A-PUFFERs successfully trekked the sandy and rocky terrain of JPL’s Mars Yard while simultaneously mapping the environment using sensors. Their maps were shared with a base station and merged into an integrated map of the area. Together, this system demonstrates a capability that could robustly map parts of the Moon that haven’t been mapped before.