


















Integrated System for Autonomous and Adaptive Caretaking (ISAAC)
ISAAC will deliver technologies to enable remote and autonomous caretaking of Gateway during long periods of time when crew are not onboard to perform maintenance, logistics management, and utilization tasks, as well as when Gateway is out of communication with ground controllers. These benefits are also “Mars-forward” in that the same capabilities will be needed for sending human crews farther into deep space.
Lead Center
Ames Research Center
Introduced
November 2018
Principal Technologist
Danette Allen
Project Manager
Trey Smith
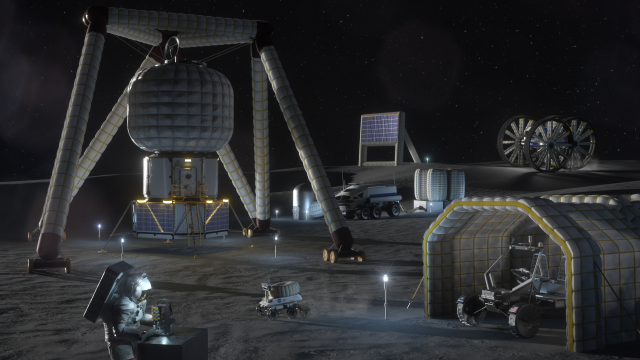
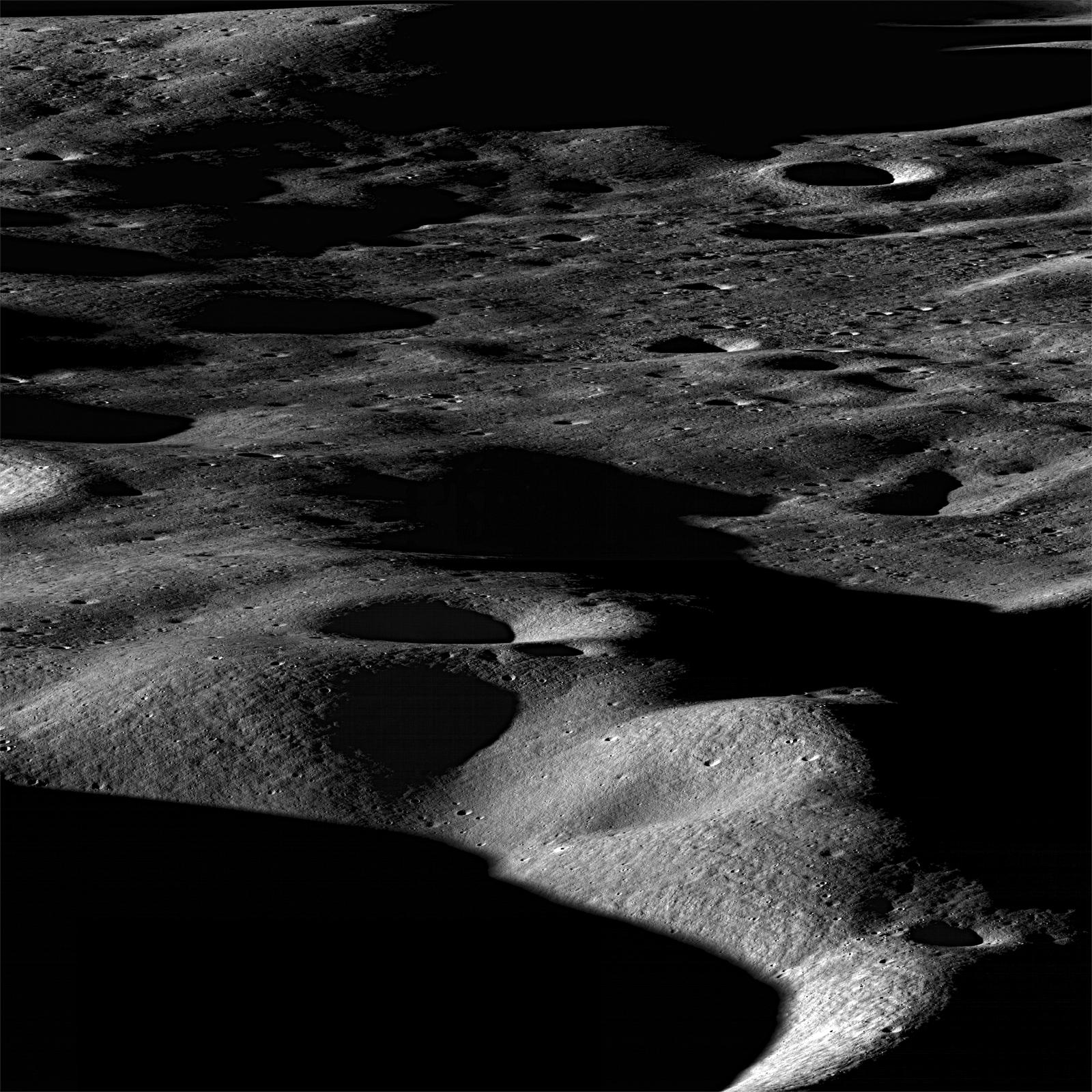
NASA needs autonomous systems to help monitor and maintain exploration spacecraft and habitats during long-duration deep-space missions, particularly during extended periods when astronauts are away. For example, NASA’s Gateway space station near the Moon, currently under development, may have crew present aboard Gateway as little as six weeks per year. The Gateway will give NASA and its partners access to more of the lunar surface than ever before, supporting both human and robotic missions.
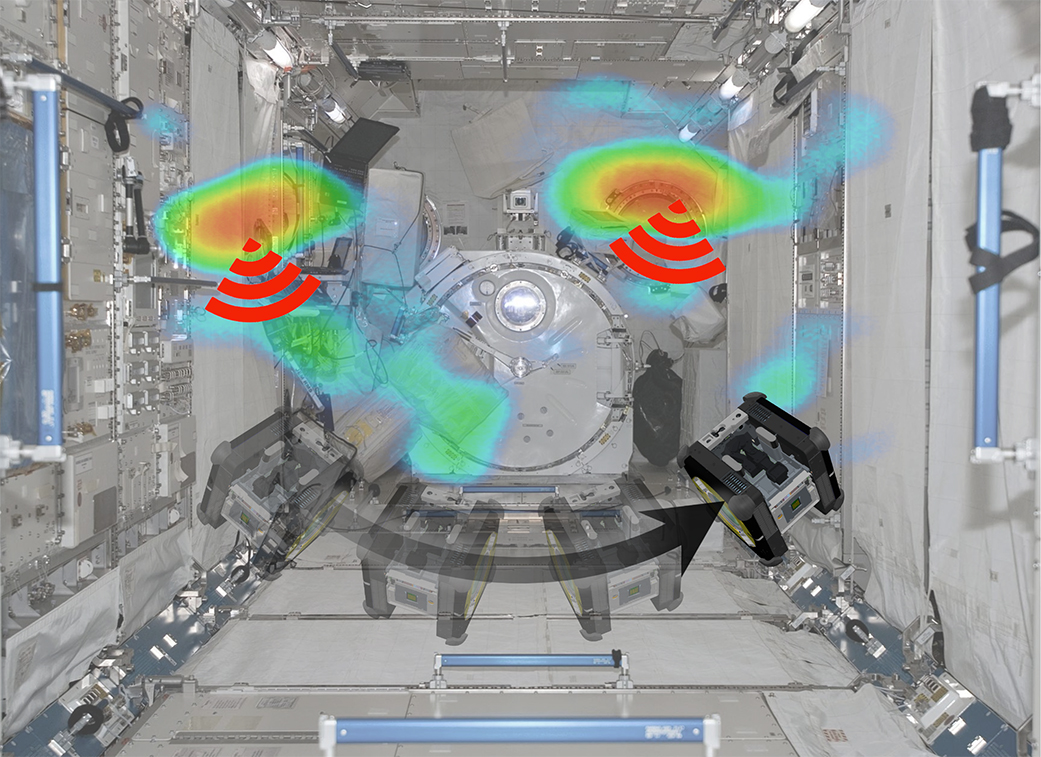
The Integrated System for Autonomous and Adaptive Caretaking project is developing technology for combining robots inside a spacecraft with vehicle infrastructure subsystems, like power and life support, to form an integrated autonomous system. ISAAC technology will be applied to the Gateway and later on to exploration missions to Mars and beyond. The system will validate its technology through demonstrations using existing robots onboard the International Space Station as analogs for future robots that will be developed for the Gateway. These existing robots include the Astrobee free-flying robots and the Robonaut mobile manipulator.
ISAAC technology will be demonstrated in three capability areas. The system will combine robotic inspection with telemetry from vehicle subsystems to better monitor vehicle health. Additionally, the software will use robots onboard to help track inventory and transfer bags from uncrewed cargo supply vehicles into the exploration spacecraft, saving astronaut time. This technology will also enable autonomous robotic response to critical problems such as a leak caused by a micrometeoroid impact.
ISAAC technology will change the operational processes for future exploration spacecraft. It will reduce dependence on the continuous presence of astronauts and continuous ground control communication with minimal lag, thereby reducing mission risk and enabling new kinds of deep-space missions.
Partners:
Multiple projects in NASA’s Advanced Exploration Systems division are providing assistance:
- The Autonomous Systems and Operations project is assisting with technology for robust planning and execution.
- The Logistics Reduction project is funding the return of Robonaut to the International Space Station, as well as the RFID Recon payload for Astrobee, which could allow the Astrobee robot to track inventory on the ISS through smart tags in the future.