


















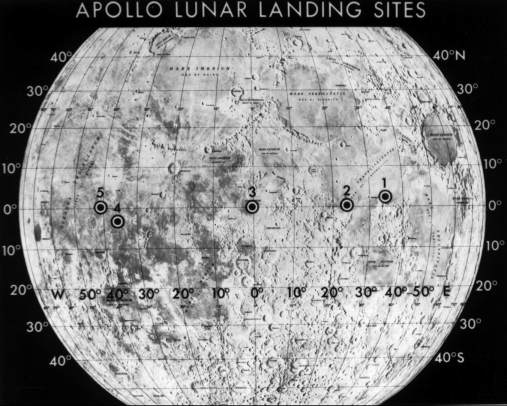
When Apollo 11’s lunar module, Eagle, landed on the Moon on July 20, 1969, it first flew over an area littered with boulders before touching down at the Sea of Tranquility. The site had been selected based on photos collected over two years as part of the Lunar Orbiter program.
But the “sensors” that ensured Eagle was in a safe spot before touching down – those were the eyes of NASA Astronaut Neil Armstrong.
“Eagle’s computer didn’t have a vision-aided system to navigate relative to the lunar terrain, so Armstrong was literally looking out the window to figure out where to touch down,” said Matthew Fritz, principal investigator for a terrain relative navigation system being developed by Draper of Cambridge, Massachusetts. “Now, our system could become the ‘eyes’ for the next lunar lander module to help target the desired landing location.”
This week, that system will be tested in the desert of Mojave, California, on a launch and landing of Masten Space Systems’ Xodiac rocket. The rocket is scheduled to take off Wednesday, Sept. 11.
The rocket flight is made possible with support from NASA’s Flight Opportunities program managed by NASA’s Armstrong Flight Research Center in Edwards, California, and the Game Changing Development program overseen by NASA’s Langley Research Center in Hampton, Virginia. It marks the first test of the system with both a descent altitude and a landing trajectory similar to what is expected on a lunar mission.
But what is terrain relative navigation? And why is it so important to NASA’s Artemis program to return American astronauts to the Moon by 2024, and future human missions to Mars?
Without capabilities like GPS, which is designed to help us navigate on Earth, determining a lander vehicle’s location is much like comparing visual cues (e.g., road signs, important buildings, notable landmarks) while driving a car with those cues identified on road maps.
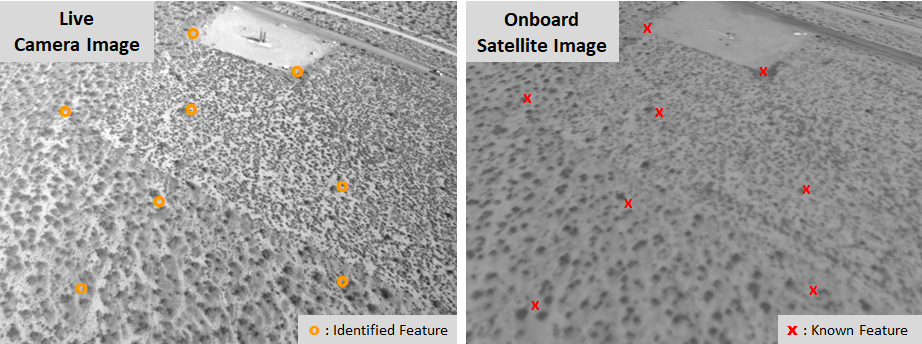
“We have onboard satellite maps loaded onto the flight computer and a camera acts as our sensor,” explained Fritz. “The camera captures images as the lander flies along a trajectory and those images are overlaid onto the preloaded satellite maps that include unique terrain features. Then by mapping the features in the live images, we’re able to know where the vehicle is relative to the features on the map.”
While the Apollo Guidance Computer was a revolutionary feat of engineering for its time, today’s technology would certainly have been welcome assistance. With the computer sounding alarms and Eagle quickly running out of fuel, Armstrong was doing his best to find a safe parking spot.
So, it’s no surprise that NASA and commercial partners are relying on the most advanced technology to upgrade navigation for future robotic and crewed missions to the Moon. The agency is developing a suite of precision landing technologies for possible use on future commercial lunar landers. NASA is already buying services for robotic Moon deliveries and is planning to ask American companies to build the next generation human landing systems.
The agency’s work to develop navigation sensors and related technologies falls under a larger effort now referred to as SPLICE, or the Safe and Precise Landing – Integrated Capabilities Evolution project. SPLICE has evolved out of other NASA projects dating back to the early 2000s, all created to develop an integrated suite of landing and hazard avoidance capabilities for planetary missions. Contributions hail from several commercial efforts and multiple NASA centers.
Terrain relative navigation is key to the overall SPLICE effort, which also includes navigation Doppler lidar, hazard detection lidar, and a high-performance onboard computer. Working together, the full suite of capabilities promises to give future crewed missions much safer and precise descents and landings on the lunar surface.
Getting there will be due in no small part to partnerships with commercial flight providers like Masten and others that enable test flights of SPLICE’s many technologies—essentially providing a series of dress rehearsals before their debut on the lunar surface. The Draper terrain relative navigation system will be ported directly into the SPLICE descent landing computer and eventually tested on Blue Origin’s New Shepard rocket.
“These types of commercial vehicles provide us a highly valuable way to test new guidance, navigation and control technologies and reduce their flight risk before being utilized in future missions,” said John M. Carson III, principal investigator for the SPLICE project at NASA’s Johnson Space Center in Houston.
According to Fritz and Carson, the benefits of commercial flight testing includes the ability to fly navigation sensors on different flight platforms at different altitudes. While Masten’s vehicle enables data collection for the descent and landing part of navigation, stratospheric balloon flights are helping the team tune the terrain relative navigation algorithm for higher altitudes when a spacecraft is approaching lunar orbit.
“By testing on different platforms and at different altitudes we’re able to get the full range of the algorithm’s capabilities,” explained Fritz. “This helps us identify where we’ll need to transition between satellite maps for different periods of the flight.”

Earlier this year, Flight Opportunities facilitated a test of the high-altitude part of Draper’s navigation algorithm on a balloon flight with World View Enterprises in Tucson, Arizona. The data from balloon flights combined with the research on Masten’s vehicle will be used to better calibrate the navigation algorithms.
“If we didn’t have these integrated field tests, a lot of new precision landing technologies might still be sitting in a lab or on paper, being deemed too risky for flight,” Carson said of the benefit of commercial flight tests. “This gives us the very necessary opportunity to get the data we need, make the necessary revisions, and build insight and confidence into how these technologies will perform on a spacecraft.”
Beyond test flights, SPLICE technologies are targeted for inclusion on upcoming flights to the Moon through NASA’s Commercial Lunar Payload Services. Other terrain relative navigation technologies developed prior to SPLICE have also made their way onto mission manifests for Mars, including the Mars 2020 lander vision system.
Following Apollo 11, Armstrong would go on to note that the landing was in fact his biggest concern of the mission. “The unknowns were rampant,” he said. “There were just a thousand things to worry about.” New technologies promise to supply astronauts with even more precise information (and fewer concerns) to increase landing safety as they navigate to the lunar surface.
NASA’s Artemis lunar exploration program includes sending a suite of new science instruments and technology demonstrations to study the Moon, landing the first woman and next man on the lunar surface by 2024, and establishing a sustained presence by 2028. The agency will leverage its Artemis experience and technologies to prepare for the next giant leap – sending astronauts to Mars.
For more information, visit: www.nasa.gov/moontomars
By Nicole Quenelle
NASA’s Armstrong Flight Research Center, Edwards, Calif.