


















![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)








Download PDF: Nonlinear Joint Modeling of Complex Systems
Bolted structural joints often exhibit load-dependent stiffness and energy dissipation that lead to nonlinear, amplitude-dependent frequency and damping in the structure. As an alternative to direct integration of the nonlinear equations of motion, a quasi-static modal analysis (QSMA) was developed to determine the dependence of frequency and damping on response amplitude using results from nonlinear static analyses. The derivation of QSMA reveals what loading should be applied to a structure such that the resulting static response approximates the dynamic response of the structure over one quarter of a cycle of vibration (or in some cases over a full vibration cycle). The result of the nonlinear static simulation can then be used to infer the way that the structure vibrates in a single mode of vibration over a range of amplitudes. In this context, this methodology develops a process for future model updating (i.e., one can iterate with QSMA much faster than direct transient).
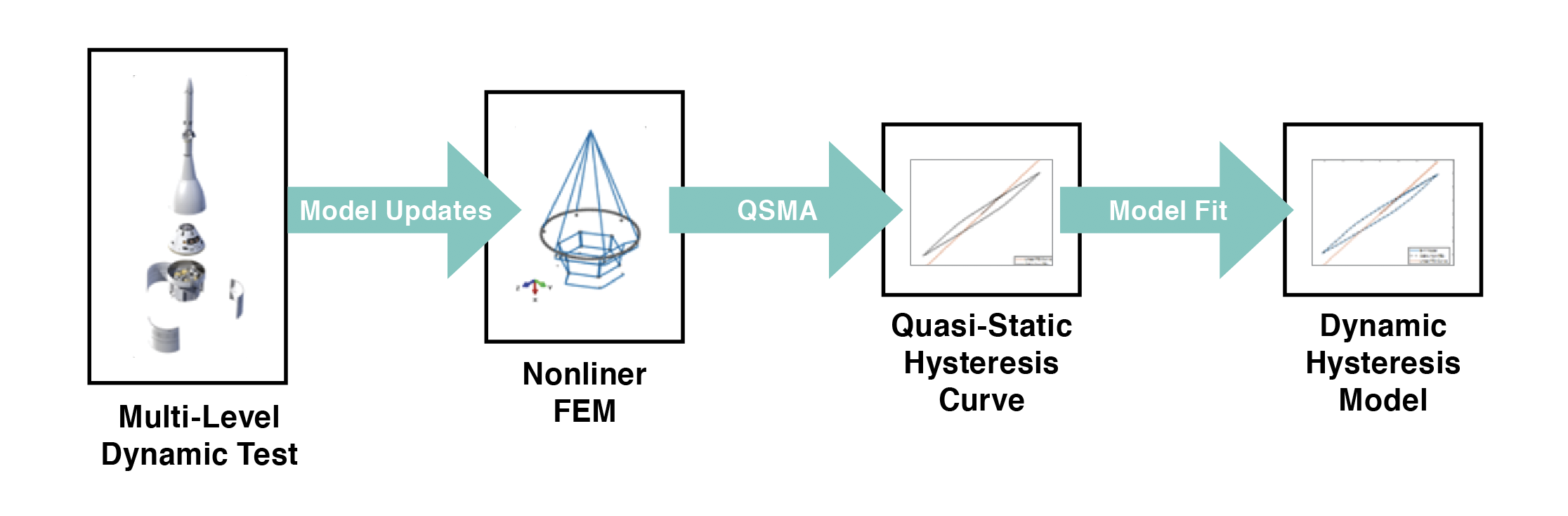
The main steps involved in application of QSMA are summarized in Figure 1. Starting from a multi-level dynamic test configuration, a nonlinear model calibration is performed. The correlated nonlinear finite element model (FEM) in this application was constructed using Abaqus software. Both friction and bilinear elements were used in the model, with joint properties calibrated to match the dynamic test results. Application of the QSMA procedure to the nonlinear FEM previously described yielded quasi-static modal hysteresis curves, which provided effective frequency and damping as functions of modal amplitude. Finally, transient simulations of a QSMA-derived dynamic model were performed by fitting a Bouc-Wen model to the QSMA hysteresis curves. Specifics to each step of the Figure 1 process include:
-
Multi-level dynamic testing must adequately excite nonlinearities present in the loading envelope, if any exist.
-
Nonlinear FEMs are expensive to construct, debug, simulate, and correlate. Appropriate selection of nonlinear elements to match the measured response can be challenging.
-
Quasi-static hysteresis curves require care when derived from commercial FEMs. Since QSMA is not a standard procedure implemented within current finite element analysis codes, it is up to the analyst to ensure correct coordinate transformations are applied during every step of the process: modal extraction, force generation, force application, displacement extraction, and modal filtering. QSMA requires access to the structural mass matrix, which is typically available but can grow quite large for commercial-scale models.
-
Dynamic hysteresis models transform the numerical QSMA curves of modal force vs. displacement into a single degree of freedom system (i.e., a nonlinear mass-spring model) that includes the hysteresis and which can be integrated in time to obtain the dynamic response.
The results from this process provide expected frequency and damping shifts as a function of response amplitude, but cannot directly provide the response of the nonlinear structure to an arbitrary transient input. Application to a transient dynamic simulation requires the numerical force/displacement results obtained via QSMA to be mapped into an appropriate model form (e.g., Bouc-Wen model).
The key advantages of using QSMA in tandem with a dynamic system model are the decrease in required simulation time – seconds vs. hours – and the physical insight into the nonlinear response that QSMA itself can inform. These advantages can serve to dramatically reduce the cost of model updating efforts and increase the feasibility of uncertainty quantification studies with nonlinear models. In either case, perturbations applied to the FEM can be quickly propagated into a dynamic modal model by running the static load cases required for QSMA and performing an appropriate model fit to obtain uncoupled, nonlinear equations of motion. The main limitations of a QSMA-based approach, as currently conceived, are related to accuracy in the presence of two key assumptions:
-
Structural modes remain invariant with load level and are not coupled, and
-
A dynamic hysteretic model can be used to represent the hysteresis loop obtained from QSMA.
For more information, contact Joel Sills | JSC | joel.w.sills@nasa.gov