

















Landing on the Moon again, and eventually Mars, is going to require new technology that will allow more precision than ever before.
Justin Green, aerospace engineer, and Anthony Williams, research computer scientist at NASA’s Langley Research Center in Hampton, Virginia, are working on software that could do just that.
Landing in a specific area and being able to implement obstacle avoidance is going to be key to human missions and landing multiple payloads in one area.
“NASA’s goal is to be able to narrow their landing sites from thousands of meters to just 50 meters, a much smaller target,” Green said.
Green and Williams’ guidance and control software, guidance meaning mapping and direction, and control meaning driving, operates continuously and is called Langley Onboard Autonomous Trajectory Planner (OATP). The software is updated based on real-time information. Right now updates occur about every three seconds, but the goal is continuous updates. When run on a supercomputer, the software runs faster and more complex algorithms and models, allowing for better precision.
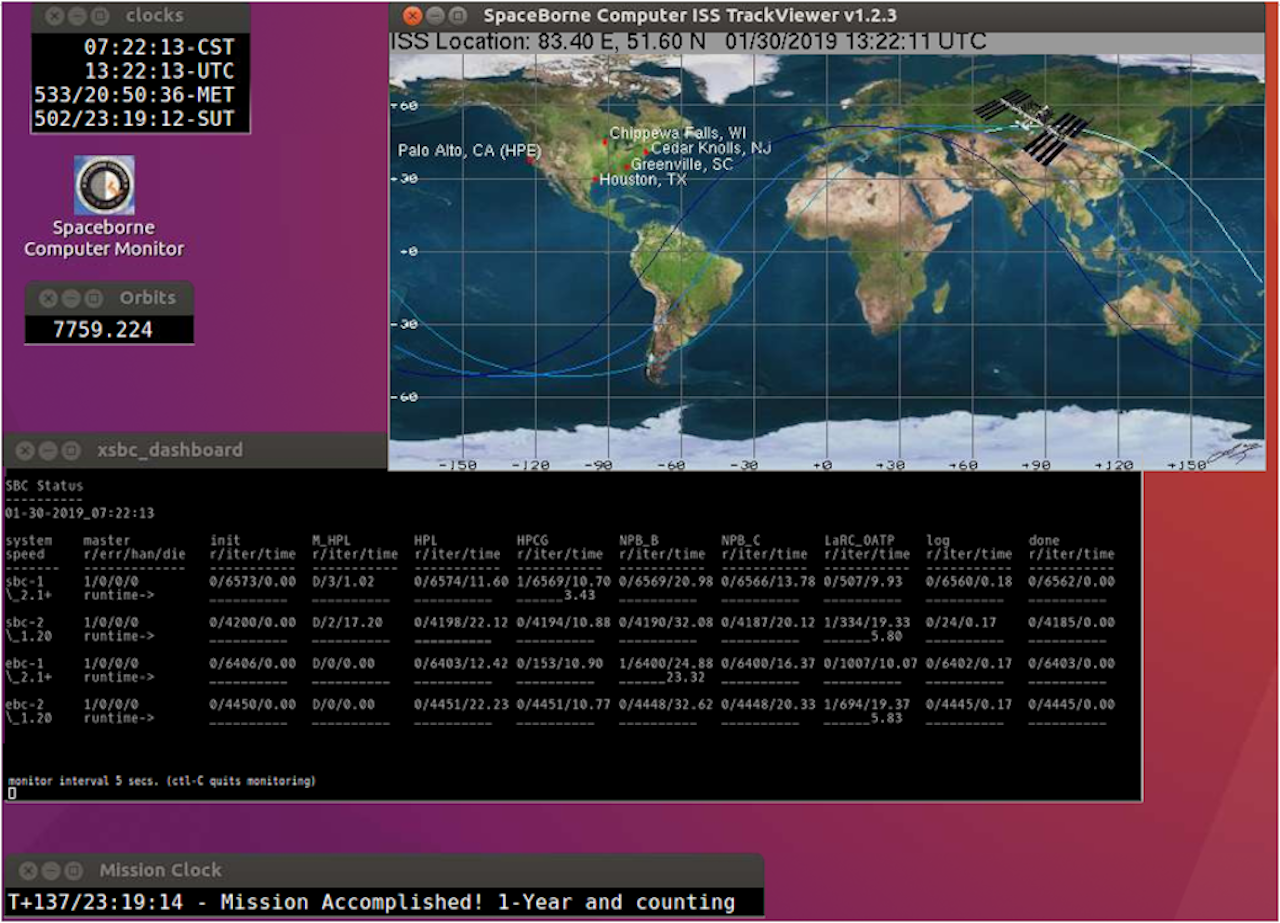
The system was ground-tested at Langley and recently completed successful testing in orbit, uploaded to Hewlett Packard Enterprise (HPE) supercomputers on the International Space Station through a payload integration agreement with NASA’s Johnson Space Center in Houston, Texas. This test helped to establish a baseline for the software’s operation in space.

“We want to make the space station available for research, it’s a lab and we are focused on getting others to use it,” said David Hornyak, space station technology demonstration research portfolio manager at Johnson. “This is a good example of bringing the best of industry and the best of what we do together. We had the capability to do this software test because HPE wanted to fly their commercial off-the-shelf supercomputer and that was made available to NASA. Working together we could do what neither of us could have done by ourselves.”
The software could ultimately be used autonomously or in robotic or human assistance scenarios. It is designed to be used in conjunction with other technologies and sensors being developed as well, such as Navigation Doppler Lidar, to be able to find and implement the best trajectory.
Using multiple computer cores allows the system to create multiple possible paths from the spacecraft’s current location to the target landing site. The software would then run simulations of each path and evaluate each option to assess which path is best.
“We’re getting better at collecting data and we’re improving our modeling and simulation to reduce uncertainty in landings and make better predictions,” said Green, who has been working on this project for the last five years as part of his Ph.D. dissertation.
“The goal is to eventually add more capability to the software, so it can take in real-time information on the engines and vehicle health, as well as the most current models, and run those simulations autonomously onboard the spacecraft, complimentary to the work being done on the ground,” he added. “In the event a course correction needed to be made it would be near impossible to do from the ground during certain parts of descent; there wouldn’t be enough time for the communications to be relayed. This software would make any necessary changes on its own.”
All the data is in and the testing was a success. No errors were detected over the span of collaboration from December 2018 through April 2019. This testing is the next step in being able to use this software for powered descent flights, landing here, on the Moon, and Mars.