





















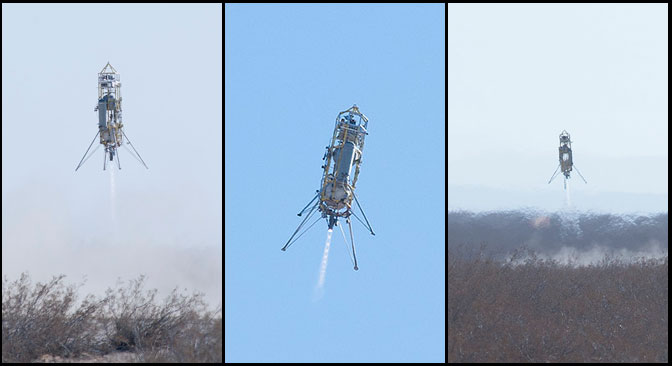
With engineers and officials from NASA’s Jet Propulsion Laboratory watching, Masten Space Systems’ XA-0.1B “Xombie” took to the sky again in the fall of 2013. The flight on Sept. 20 was the conclusion of a test campaign to assess the performance of JPL’s Guidance for Fuel Optimal Large Diverts (G-FOLD) algorithm under mission conditions.
More ambitious than the previous flights, this test had the Xombie rocket initially travel diagonally away from the target landing site after launch. This simulated a worst-case spacecraft landing maneuver and forced the G-FOLD algorithm to calculate, in real time, a flight path that crossed over itself to reach the safe landing site, according to JPL’s Autonomous Descent and Ascent Powered-flight Testbed (ADAPT) team.

“G-FOLD presents a dramatic improvement in our ability to execute large divert maneuvers with limited fuel,” said ADAPT team lead Martin Regehr.
According to team members, the accurately executed half-mile-long (0.8-kilometer), three-dimensional divert showed the potential of what G-FOLD could mean for future space missions. Compared to the software used to land NASA’s Mars Curiosity rover in August 2012, G-FOLD can provide six times more divert range for a lander of that class. Such a capability would be needed for landing on Europa or for human missions to Mars.
The ADAPT team believes that G-FOLD also might reduce the difficulty of future robotic missions to Mars, allowing rovers to land closer to features of interest instead of driving long distances to reach them. A future rover similar to Curiosity might be able to land right next to a target of scientific interest like Mount Sharp instead of driving for a year to get there.
Even though this is the culmination of the current round of testing, JPL’s ADAPT team still has far-reaching plans for G-FOLD and for further tests of other landing technologies.
To further enhance future mission capability, JPL plans to use ADAPT to demonstrate terrain-relative navigation using the Lander Vision System (LVS) together with G-FOLD in 2014.
This effort was performed by JPL, based in Pasadena, Calif., with participation from the University of Texas at Austin; Masten Space Systems, Inc., Mojave, Calif.; and was supported by NASA’s Flight Opportunities Program, managed by NASA’s Dryden Flight Research Center, Edwards, Calif.
Public Affairs
NASA Jet Propulsion Laboratory