



![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)








What is Starling?
A Multi-CubeSat Mission to Demonstrate Autonomous Swarm Technologies

Editor’s Note: This article was revised March 19, 2026, to reflect milestone updates for Starling experiments.
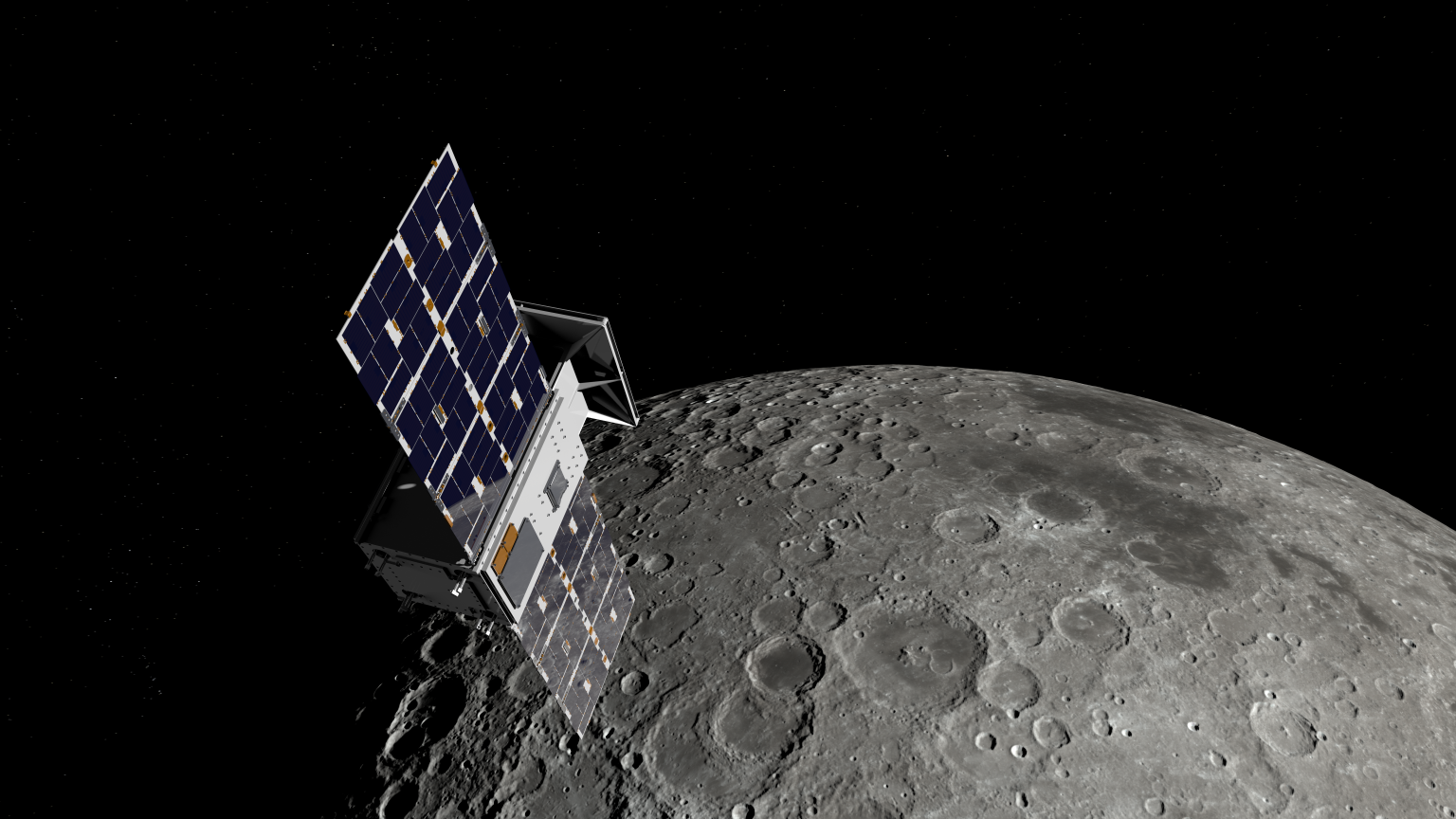
NASA’s Starling mission is advancing the readiness of various technologies for cooperative groups of spacecraft – also known as distributed missions, clusters, or swarms. Starling demonstrates technologies to enable multipoint science data collection by several small spacecraft flying in such groups. The mission uses four CubeSats in low-Earth orbit to test systems that let spacecraft operate in a synchronized manner without direct control from the ground. The technologies will advance the following capabilities:
- Swarm maneuver planning and execution
- Communications networking
- Relative navigation
- Autonomous coordination between spacecraft
The Starling mission is testing whether the technologies work as expected, what their limitations are, and what developments are still needed for spacecraft swarms to be successful.
Greater Autonomy Enhances Swarm Mission Feasibility
Spacecraft swarms have the advantage of allowing a mission to distribute spacecraft across many locations at once, enabling science data collection across large regions of space or from multiple vantage points, rather than just one location with a single spacecraft. Incorporating autonomy onboard the spacecraft allows these swarms to act cooperatively with minimal oversight from the ground. Autonomy ensures that a mission continues to perform through periods when communications from the ground are temporarily unavailable because of distance or location. Spacecraft swarms operating at great distances from the Earth must act more autonomously due to the delays in time and the limited bandwidth and availability of communicating with Earth-based ground stations.
Clustering satellites into a swarm requires frequent maneuver planning and execution for each spacecraft to control their relative positions and orbits. Managing these operations from the ground becomes impractical as the size of the swarm grows and/or the time delay in communicating with the spacecraft increases. The Starling mission tests technologies that move operations that are traditionally performed on the ground to instead operate onboard the spacecraft.
Having the spacecraft in a swarm operate autonomously is essential to making distributed spacecraft missions affordable and highly scalable. Starling is a first step in developing this new mission architecture that could eventually allow for autonomous swarms of many spacecraft and at greater distances from Earth.
Starling Technology Demonstrations
The four 6-unit CubeSats (each about the size of two stacked cereal boxes) fly in a Sun-synchronous orbit more than 300 miles above Earth and no more than 170 miles apart from each other. The spacecraft fly in two formations. First, they began in line, or in-train, like a string of pearls. Then, the CubeSats moved out of the in-train configuration and into a set of stable relative orbits known as passive safety ellipses.
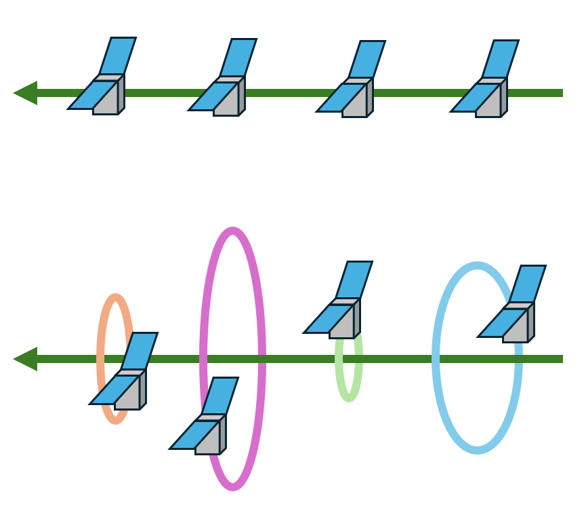
Formation 2: (Bottom) Passive Safety Ellipses
During Starling phase 1.0, the following four technologies were tested:
- Reconfiguration and Orbit Maintenance Experiments Onboard (ROMEO): ROMEO demonstrated execution of swarm maintenance maneuvers from aboard the spacecraft with minimal ground intervention. The experiment team successfully demonstrated the system’s ability to estimate the spacecraft’s position and trajectory to then determine and plan a change in orbit.
- Mobile Ad-hoc Network (MANET): The CubeSats were able to automatically establish a network in space to communicate with each other via two-way S-band crosslink radios/antennas, adapting a ground-based network protocol for reliable space communication across any spacecraft node within the swarm. The system further demonstrated that when one spacecraft’s space-to-ground radio failed, the team could still load commands, software updates, and other vital information over the crosslink radios from another swarm member.
- Starling Formation-Flying Optical Experiment (StarFOX): Using commercial star tracking cameras, Starling spacecraft were able to determine their own position as well as recognize fellow swarm members, other satellites, and even space debris. The experiment was the first-ever published demonstration of this type of swarm navigation, including the ability to track multiple members of a swarm simultaneously and the ability to share observations between spacecraft. The experiment further demonstrated the groundbreaking ability to autonomously estimate the swarm’s orbits using only inter-satellite measurements from star trackers.
- Distributed Spacecraft Autonomy (DSA): This experiment demonstrated the spacecrafts’ ability to optimize data collection across the swarm, marking several first-in-space milestones along the way. The Starling spacecraft autonomously monitored Earth’s ionosphere, the layer between our atmosphere and the beginning of space, using dual-band GPS receivers to measure the electron density of the ionosphere. Each orbiting Starling spacecraft constantly changed position relative to the atmospheric phenomenon and the GPS satellites, requiring changes to the monitoring strategy in response to observations. DSA onboard software autonomously coordinated the selection of the best GPS signals across all Starling spacecraft to accurately capture regions of higher or lower electron density. This was accomplished by first sharing information over the crosslink network to maintain a consistent state, then selecting the GPS signals to prioritize and share in the future. The accomplishments of DSA onboard Starling include the first fully distributed autonomous operation of multiple spacecraft, the first use of space-to-space communications to autonomously share status information between multiple spacecraft, the first demonstration of fully distributed reactive operations onboard multiple spacecraft, the first use of a general-purpose automated reasoning system onboard a spacecraft, and the first use of fully distributed automated planning onboard multiple spacecraft.
During Starling phase 1.5, the following technologies were tested:
- Automated space traffic coordination: NASA’s Starling satellites partnered with SpaceX’s Starlink constellation, which also maneuver autonomously, to test automated cooperation between spacecraft managed by different operators. SpaceX and NASA collaborated to design a screening service to warn operators about possible conjunctions, when two objects exceed tolerance for a close approach along their orbital paths. Satellite operators were able to submit trajectories and receive conjunction data quickly, then accept responsibility to maneuver away from a potential risk. In this test, Starling accepted maneuvering responsibility, then autonomously planned and executed the maneuver to resolve a conjunction simulation test with a Starlink satellite.
Additional Benefits
It’s important to note that although Starling is being tested in low-Earth orbit, the technologies apply equally as well to deep space applications. In the future, constellation-like swarms of autonomously operating CubeSats could provide NASA and commercial missions in deep space with navigation services akin to GPS and communications relays provided by Earth’s network of communications satellites. Distributed spacecraft can also work together to collect multi-point science data and prepare for exploration missions by positioning multiple small spacecraft to function as one very large observation instrument. This could support the identification of resources for long-term presence on the Moon. Another example of this cooperative work might include telescopes mounted on multiple small spacecraft and trained on a particular observation target, creating a larger field of view than possible with a single telescope.
Fast Facts:
- The four CubeSats are in a Sun-synchronous orbit around Earth. Sun-synchronous orbits are nearly polar orbits that allow a satellite to consistently see the same amount of sunlight each orbit and therefore generate the same amount of power with its solar panels.
- A polar orbit is one in which the satellite passes near both poles. Polar orbits allow the Starling swarm to obtain complete global coverage over multiple orbits, allowing the DSA payload the best opportunity to detect atmospheric phenomenon and demonstrate the ability to autonomously react to data collected in the space environment.
- Starling launched on July 17, 2023 from Rocket Lab Launch Complex 1 in New Zealand.
Partners:
- NASA’s Small Spacecraft & Distributed Systems program within the Space Technology Mission Directorate funds and manages the Starling mission.
- NASA’s Ames Research Center in Silicon Valley, California, leads the Starling project, providing payload avionics and software, spacecraft integration and test, and mission operations.
- Blue Canyon Technologies of Boulder, Colorado, designed and manufactured the spacecraft buses and provides mission operations support.
- Emergent Space Technologies of Laurel, Maryland, provided the cluster flight application software for ROMEO.
- CesiumAstro of Austin, Texas, provided the crosslink radios and antennas for the MANET experiment.
- Stanford University’s Space Rendezvous Lab in Stanford, California, developed the StarFOX experiment.
- NASA’s Game Changing Development program within the Space Technology Mission Directorate provided funding for the DSA experiment.
- L3Harris Technologies, Inc., of Melbourne, Florida provided ground software support for spacecraft navigation and maneuver planning.
- Rocket Lab USA, Inc., of Long Beach, California, provided launch and integration services.
- SpaceX of Hawthorne, California, partnered on the Starling 1.5 space traffic management test demonstration.
Learn more:
- NASA Starling Mission Animation
- Satellite Swarms for Science ‘Grow up’ at NASA Ames
- What are SmallSats and CubeSats?
- TechPort Project Summary for NASA’s Starling technology demonstration.
- NASA’s Starling Mission Sending Swarm of Satellites into Orbit
- Follow NASA’s Starling Swarm in Real Time
- NASA’s Starling Prepares to Launch Small Spacecraft Swarm to Orbit
- Swarming for Success: Starling Completes Primary Mission
- NASA Starling and SpaceX Starlink Improve Space Traffic Coordination
- NASA Satellite Swarm’s Expanded Mission Powers Smarter Operations
For investigators:
- Investigators interested in funding opportunities with the SST program should visit the program’s website.
- For technical inquiries about Starling, contact: arc-sst@mail.nasa.gov
For news media:
Members of the news media interested in covering this topic should reach out to the NASA Ames newsroom.