




















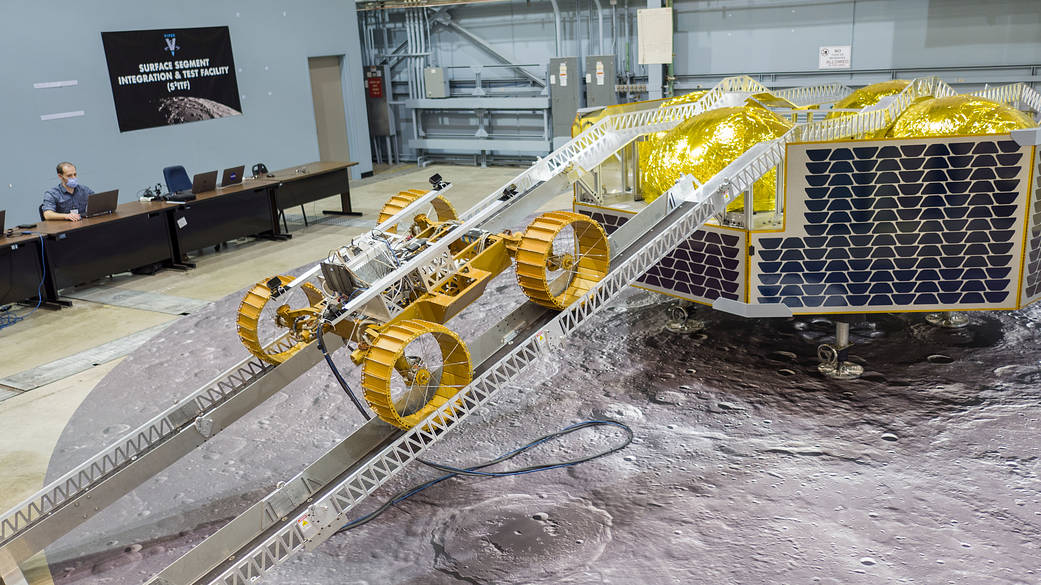
When NASA’s water-hunting robot – the Volatiles Investigating Polar Exploration Rover, or VIPER – arrives on the lunar surface, it will use two folding ramps to drive off the lander in style and begin exploring the Moon. To make sure its big moment goes off without a hitch, the VIPER team recently tested those ramps at NASA’s Johnson Space Center in Houston.
Using a full-scale model of the Griffin lander that will deliver VIPER to the Moon, the team evaluated how well a rover test unit was able to move on the ramps. The results showed ways NASA’s partner, Astrobotic of Pittsburgh, can modify the ramp designs. This will ensure the rover can maneuver on them – keeping its wheels within the guardrails, for example – and make a flawless exit onto the Moon.
Different materials were also tested on the surface of the ramps. These tests will help inform the designers about what qualities help the rover’s wheels move smoothly and securely. VIPER successfully descended the ramps on a textured aluminum surface, high-friction sandpaper, and a high-friction elastomer – a polymer with elastic properties.
Launching in 2023, VIPER will explore the Moon’s South Pole and map its surface for water and other resources. Astrobotic will provide the Griffin lander and VIPER’s delivery to the lunar surface through the Commercial Lunar Payload Services initiative.
Photo credit: NASA/Johnson Space Center/James Blair