


















![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)






Jay McMahon
University of Colorado, Boulder
Description
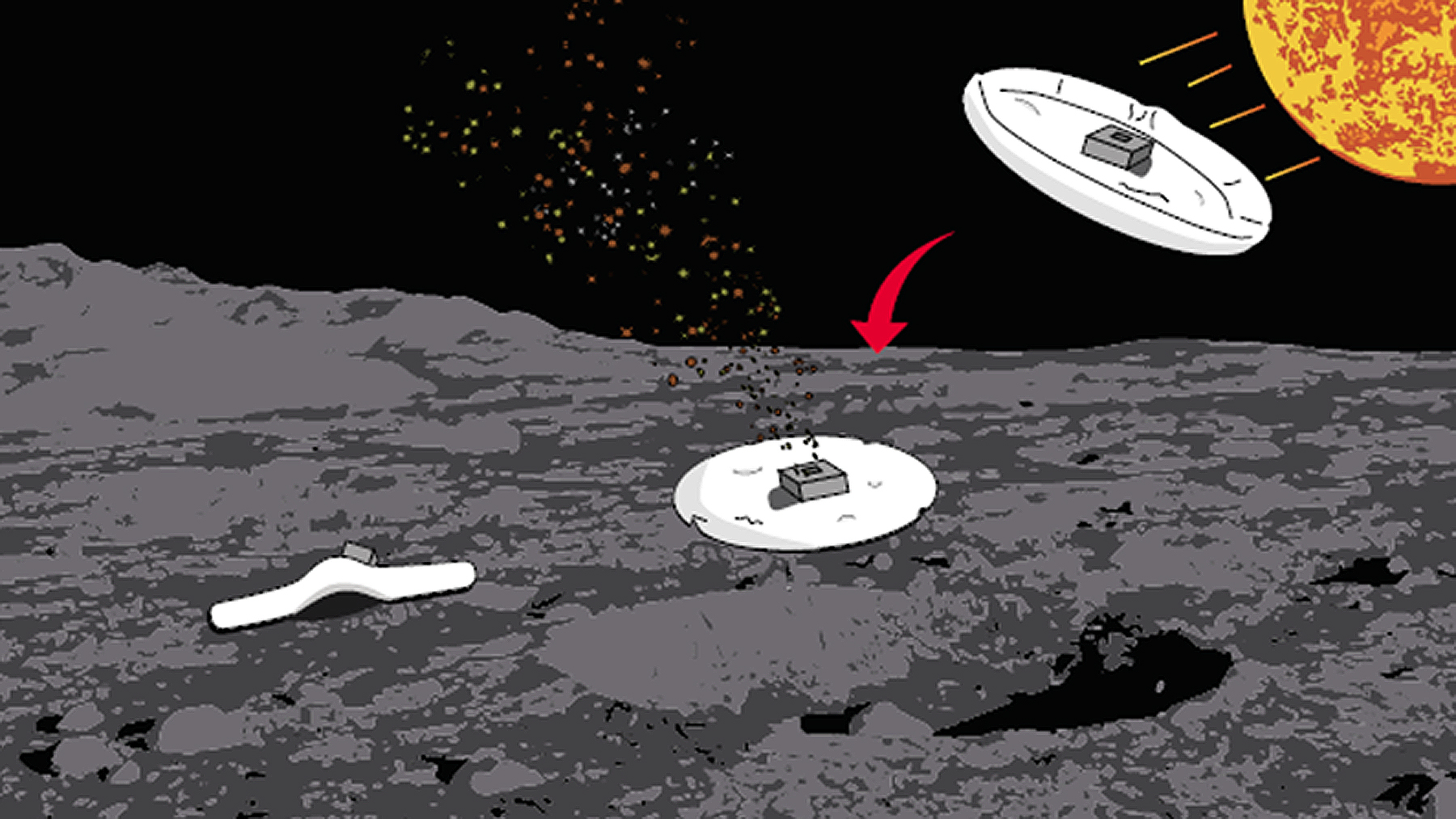
This proposal seeks to develop a new type of soft robotic spacecraft which is specifically designed to move efficiently on the surface of, and in proximity to, rubble pile asteroids. These new spacecraft are termed Area-of-Effect Soft-bots (AoES) as they have large surface areas which enable mobility that is especially effective at small asteroids. The surface mobility is enabled by using adhesion between the soft robot and the asteroid surface. The adhesive forces also allow the AoES to anchor themselves in order to liberate material from the asteroid and launch it off the surface for collection by an orbiting resource processing spacecraft – forming the fundamental pieces of a resource utilization mission to a near-Earth asteroid (NEA). Furthermore, the large area necessary for the adhesion based mobility and anchoring also gives the AoES a relatively high area-to-mass ratio, enabling fuel-free orbit control using solar radiation pressure (SRP) forces. In total, this concept elegantly overcomes many of the difficulties typically encountered when trying to design a mission to retrieve a significant amount of material from an asteroid surface – in many cases using these perceived difficulties (e.g. microgravity, fast spin rates) to the advantage of the architecture. Development of AoES in order to make this mission architecture feasible therefore has the potential to drastically improve the capabilities of harvesting water and other resources from the variety of small, plentiful, easily accessible NEAs – enabling further exploration and economic profit in the solar system.



