![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/missions/a-step/FFR_Earth_Background_20251120%20.png?w=1024)












Called IceNode, the project envisions a fleet of autonomous robots that would help determine the melt rate of ice shelves.
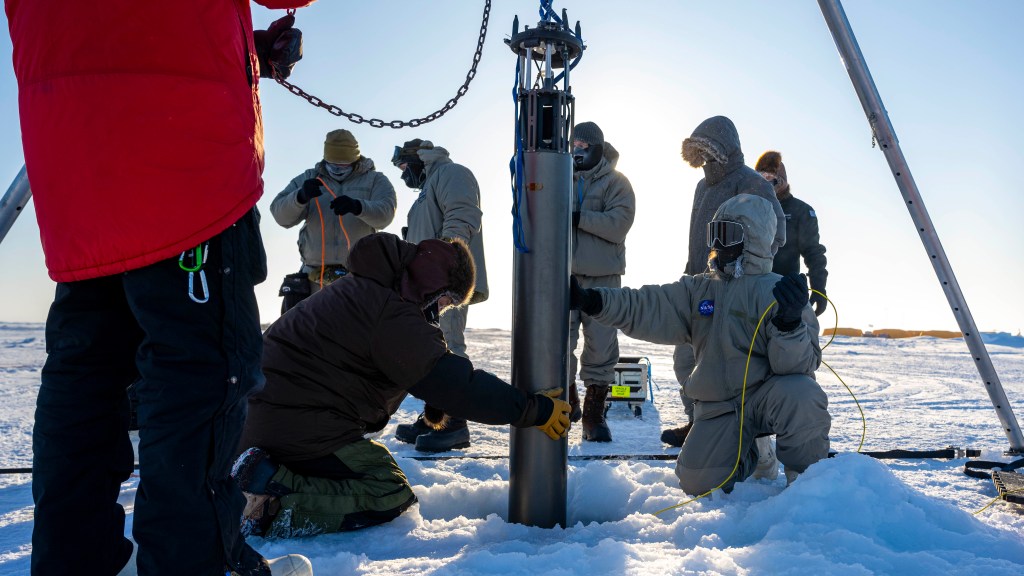
On a remote patch of the windy, frozen Beaufort Sea north of Alaska, engineers from NASA’s Jet Propulsion Laboratory in Southern California huddled together, peering down a narrow hole in a thick layer of sea ice. Below them, a cylindrical robot gathered test science data in the frigid ocean, connected by a tether to the tripod that had lowered it through the borehole.
This test gave engineers a chance to operate their prototype robot in the Arctic. It was also a step toward the ultimate vision for their project, called IceNode: a fleet of autonomous robots that would venture beneath Antarctic ice shelves to help scientists calculate how rapidly the frozen continent is losing ice — and how fast that melting could cause global sea levels to rise.
Warming Waters, Treacherous Terrain
If melted completely, Antarctica’s ice sheet would raise global sea levels by an estimated 200 feet (60 meters). Its fate represents one of the greatest uncertainties in projections of sea level rise. Just as warming air temperatures cause melting at the surface, ice also melts when in contact with warm ocean water circulating below. To improve computer models predicting sea level rise, scientists need more accurate melt rates, particularly beneath ice shelves — miles-long slabs of floating ice that extend from land. Although they don’t add to sea level rise directly, ice shelves crucially slow the flow of ice sheets toward the ocean.

The challenge: The places where scientists want to measure melting are among Earth’s most inaccessible. Specifically, scientists want to target the underwater area known as the “grounding zone,” where floating ice shelves, ocean, and land meet — and to peer deep inside unmapped cavities where ice may be melting the fastest. The treacherous, ever-shifting landscape above is dangerous for humans, and satellites can’t see into these cavities, which are sometimes beneath a mile of ice. IceNode is designed to solve this problem.
“We’ve been pondering how to surmount these technological and logistical challenges for years, and we think we’ve found a way,” said Ian Fenty, a JPL climate scientist and IceNode’s science lead. “The goal is getting data directly at the ice-ocean melting interface, beneath the ice shelf.”
Floating Fleet
Harnessing their expertise in designing robots for space exploration, IceNode’s engineers are developing vehicles about 8 feet (2.4 meters) long and 10 inches (25 centimeters) in diameter, with three-legged “landing gear” that springs out from one end to attach the robot to the underside of the ice. The robots don’t feature any form of propulsion; instead, they would position themselves autonomously with the help of novel software that uses information from models of ocean currents.
Released from a borehole or a vessel in the open ocean, the robots would ride those currents on a long journey beneath an ice shelf. Upon reaching their targets, the robots would each drop their ballast and rise to affix themselves to the bottom of the ice. Their sensors would measure how fast warm, salty ocean water is circulating up to melt the ice, and how quickly colder, fresher meltwater is sinking.
The IceNode fleet would operate for up to a year, continuously capturing data, including seasonal fluctuations. Then the robots would detach themselves from the ice, drift back to the open ocean, and transmit their data via satellite.
“These robots are a platform to bring science instruments to the hardest-to-reach locations on Earth,” said Paul Glick, a JPL robotics engineer and IceNode’s principal investigator. “It’s meant to be a safe, comparatively low-cost solution to a difficult problem.”
Arctic Field Test
While there is additional development and testing ahead for IceNode, the work so far has been promising. After previous deployments in California’s Monterey Bay and below the frozen winter surface of Lake Superior, the Beaufort Sea trip in March 2024 offered the first polar test. Air temperatures of minus 50 degrees Fahrenheit (minus 45 Celsius) challenged humans and robotic hardware alike.
The test was conducted through the U.S. Navy Arctic Submarine Laboratory’s biennial Ice Camp, a three-week operation that provides researchers a temporary base camp from which to conduct field work in the Arctic environment.
As the prototype descended about 330 feet (100 meters) into the ocean, its instruments gathered salinity, temperature, and flow data. The team also conducted tests to determine adjustments needed to take the robot off-tether in future.
“We’re happy with the progress. The hope is to continue developing prototypes, get them back up to the Arctic for future tests below the sea ice, and eventually see the full fleet deployed underneath Antarctic ice shelves,” Glick said. “This is valuable data that scientists need. Anything that gets us closer to accomplishing that goal is exciting.”
IceNode has been funded through JPL’s internal research and technology development program and its Earth Science and Technology Directorate. JPL is managed for NASA by Caltech in Pasadena, California.
News Media Contact
Melissa Pamer
Jet Propulsion Laboratory, Pasadena, Calif.
626-314-4928
melissa.pamer@jpl.nasa.gov
2024-115