



















Javid Bayandor
State University Of New York, Buffalo
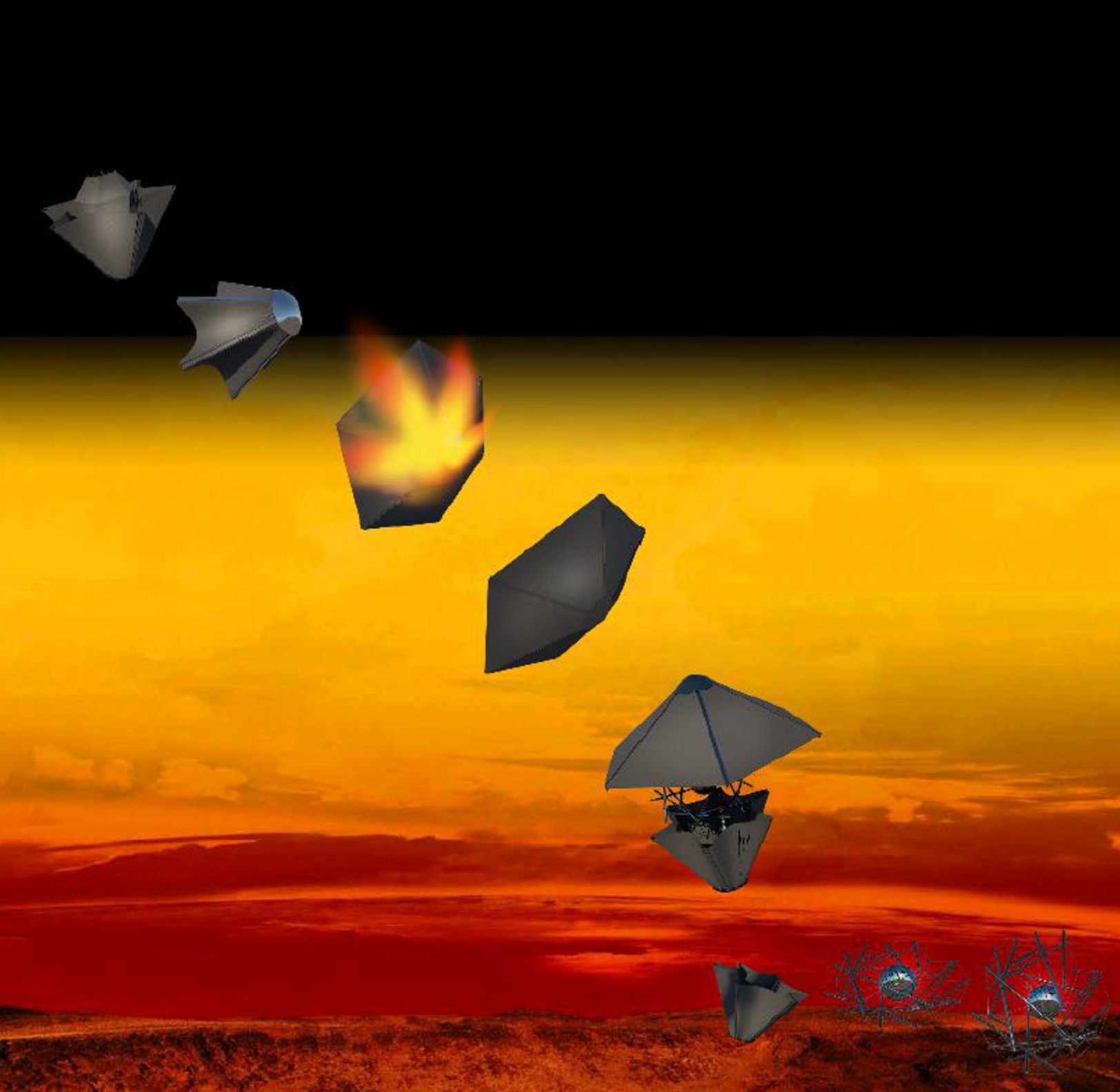
With many characteristics similar to Earth, Venus has long been considered of high scientific interest to NASA. The Venus surface temperatures near 460°C and pressures of 93 bar have made long duration surface missions infeasible. The atmosphere is also caustic and has a dense cloud layer resulting in poor topography mapping, requiring either hazard tolerant landing systems with significant mass penalties, or the exclusion of landing sites with rough terrains due to safe landing concerns at the expense of scientific value. The Tension Adjustable Network for Deploying Entry Membrane (TANDEM) concept is a lightweight vehicle developed to operate in Venusian extreme environment. TANDEM’s unified design is capable of handling all aspects of Entry, Descent, Landing, and Locomotion (EDLL) through an integrated tensegrity and deployable semi-rigid heat shield design. Most proposed EDLL concepts utilize separate systems for each stage, resulting in significant mass penalties due to the need to carry systems not in continual use over the life of their respective missions. The design of TANDEM uses an actively controlled tensegrity frame for entry and descent that are also used for landing and locomotion. This enables TADEM to gather science data during its descent stage as well as on the surface. The truss-like configuration of the frame of TANDEM is a lightweight design that allows for a high payload to structural mass ratio, leading to a significant mass reduction. Phase I demonstrated that for a mission to the rugged tessera regions, the mass of TANDEM is 49% lighter than the VITaL, and 33% lighter than the ADEPT-VITaL concept missions. TANDEM’s design distributes the impact landing loads across its entire frame, providing an omnidirectional protection for the payload. This is ideal for landed missions to Venus where only low-resolution topography maps exist. The Phase I investigations suggest that a properly configured TANDEM vehicle can safely land and perform science measurements on the tessera terrains.
Phase II will advance the development of TANDEM with the goal of increasing its TRL. Through continued collaboration with NASA Ames, various control methods using machine learning will be investigated to allow TANDEM to perceive and navigate rough terrains with characteristics similar to the proposed mission sites using coupled integrated vision system and spiking neural network. These control methods will be designed based on the NASA Tensegrity Robotics Toolkit and verified experimentally using a prototype. Various failure modes, such as removing a cable along the TANDEM’s frame, will also be examined to assess the design redundancies and ensure continuous locomotion of the vehicle in case of damage or malfunction.
As TANDEM is a multifunctional vehicle, raising its TRL requires tests in all phases of EDLL. Non-flight rated prototypes of various complexity will be developed to test system’s functionality and performance during several mission critical events including, but not limited to, entry and descent membrane deployment and tensioning, impact, and locomotion. While the prototypes and subsystems will be tested in a laboratory environment, their designs will incorporate the limitations of the extreme conditions required for operation on the surface of Venus. The design space will be explored through numerical simulations, and validations through testing. The simulations and tests planned for this study will raise the concept’s technology readiness from TRL2 to TRL3, and up to TRL4. The Phase II investigations will bring together academia with various NASA centers (Ames, LaRC, and KSC) and their individual expertise to highlight how TANDEM with its unmatched level of adaptability can enable missions to harsh planetary environments, such as Venus and Mercury. The relevant critical technologies developed can further enable complex guided traverse and sustained functionality on any high-risk landing sites.



