


















![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)







Distributed Spacecraft Autonomy (DSA)
To advance the state of the art in autonomous Distributed Space Systems (DSS), the Distributed Spacecraft Autonomy (DSA) team at NASA’s Ames Research Center is developing within five relevant technical areas: distributed resource and task management, reactive operations, system modeling and simulation, human-swarm interaction, and ad hoc network communications.
Lead Center
Ames Research Center
Introduced
October 2017
Principal Technologist
Danette Allen
Project Manager
Caleb Adams

The Distributed Spacecraft Autonomy (DSA) project seeks to advance NASA’s spacecraft autonomy capabilities.
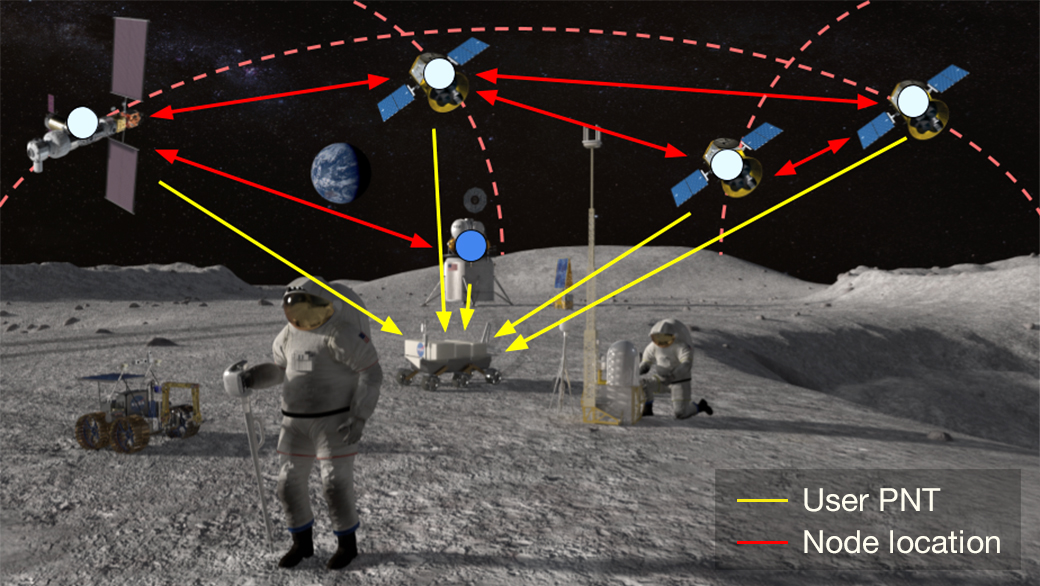
Autonomy is an essential technology for multi-spacecraft missions. It allows spacecraft to decide their next activities, as opposed to having the spacecraft send their status to a control station on the ground and await further instructions. This autonomous decision-making capability is critical to the success of future deep-space missions with multiple spacecraft. The time delay on the round-trip communications and the amount of data that can be sent make it impractical to follow the classic model of receiving status on the ground then commanding, especially for multiple spacecraft. Autonomous decision-making would allow multiple spacecraft to share data and make quick decisions together, thus overcoming any latency and bandwidth constraints.
The DSA project will advance command and control methodologies for controlling a swarm of spacecraft as a single entity, demonstrate autonomous coordination between multiple spacecraft in the swarm, and demonstrate approaches for adaptive reconfiguration of the swarm’s plan and distributed decision-making across a swarm of spacecraft.
The project will contribute to the STMD’s Small Space Craft Technology Starling Program’s 2021 mission, which involves four CubeSats that will carry NASA payloads. After this 2021 in-space demonstration, DSA software will then be tested on ground hardware with up to 100 spacecraft. This ground hardware test will validate the scalability of the software.
Latest News


Sunlight Extracts Oxygen From Regolith Using Solar Chemistry

NASA Kennedy Digs Latest Robot Test

NASA Langley Uses Height, Gravity to Test Long, Flexible Booms

Top Prize Awarded in Lunar Autonomy Challenge to Virtually Map Moon’s Surface


