



















This article is from the 2021 NESC Technical Update.
What is Autonomous GNC?
Autonomy is the ability of a system to achieve goals while operating independently of external control. In its most complete form, Autonomous GNC is an integrated end-to-end system of perceptive sensing hardware, processing hardware, and actuation hardware whose actions are governed by goal-driven algorithms that function and operate in a self-sufficient and self-directed manner independent of external commands.
- Autonomous GNC is not automation, but likely would be implemented in part with automatic functions. “Automation is the automatically-controlled operation of an apparatus, process, or systems by mechanical or electronic devices that take the place of human labor – Merriam-Webster.” Automation is not “self-directed,” but instead requires command and control (e.g., a preplanned set of instructions). A system can be automated without being autonomous.
- Autonomous GNC is not necessarily artificial intelligence (AI), but likely would employ elements of AI such as perception, machine learning, classification, etc.
- Autonomous GNC is not about making systems intelligent, advanced, smart, or uncrewed but rather is fundamentally about making them self-sufficient and self-directed.
NASA, in common with other national space agencies, has a strong interest in the Research and Development (R&D) of algorithms for autonomous Guidance, Navigation, & Control (GNC) systems. Beyond the forward-looking R&D aspects, NASA and our industry partners have the challenging responsibility of architecting, designing, developing, launching, and operating spaceflight systems for human and scientific exploration. Often, NASA serves as a bridge between the autonomous algorithm developers in the R&D community and our industry partners who subsequently infuse the advanced algorithms into their engineering practice.
Many future NASA missions will have demanding new requirements for onboard autonomy, optimization, adaptation, and fault tolerant operations. There are many examples of future missions driving advanced non-traditional GNC system design, including a proposed Europa lander, asteroid/comet/planetary sample return missions, Phobos landers, Mars human landers, advanced launch systems, etc. These future missions may have a cadence of decision making that exceeds communication constraints (e.g., time delays, data bandwidth, and limited communication windows), and time-critical decisions for performing orbit/trajectory control maneuvers, managing GNC system health, and/or performing GNC system reconfigurations may have to be made on-board the vehicle without human intervention.
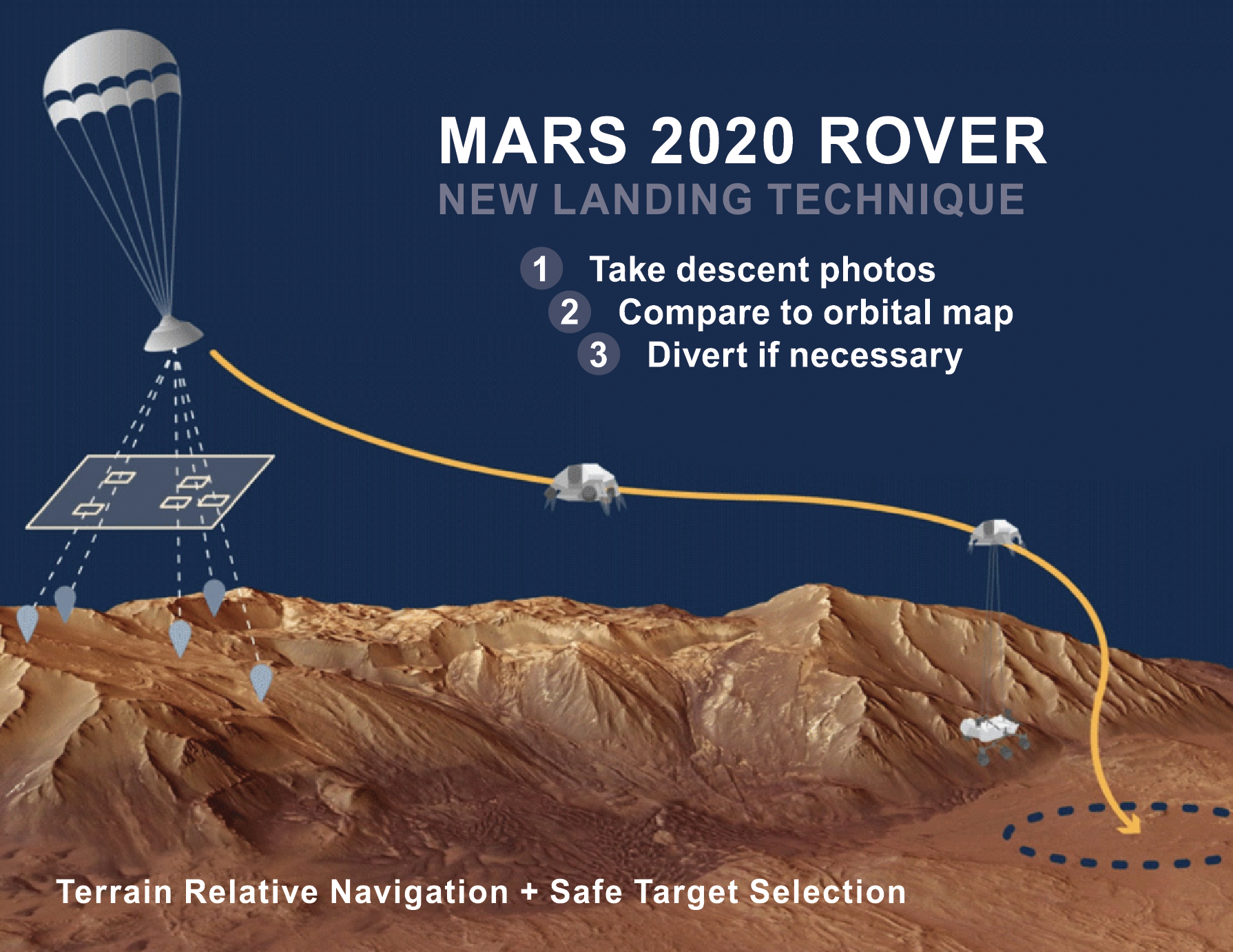
As mission goals become more ambitious, exploration vehicles will likely fly in closer proximity to unexplored bodies and operate in extreme environments with unpredictable dynamic interactions between the vehicle and the local environment. Operations that extend into unknown and uncharacterized flight regimes could pose unacceptable risks without GNC technological innovations. All this drives the near-term need for Trusted Autonomous GNC. Examples are adaptive guidance for optimizing aerodynamic and/or propulsion performance during planetary entry, descent, and landing with precision, hazard-avoiding, and surface landing requirements.
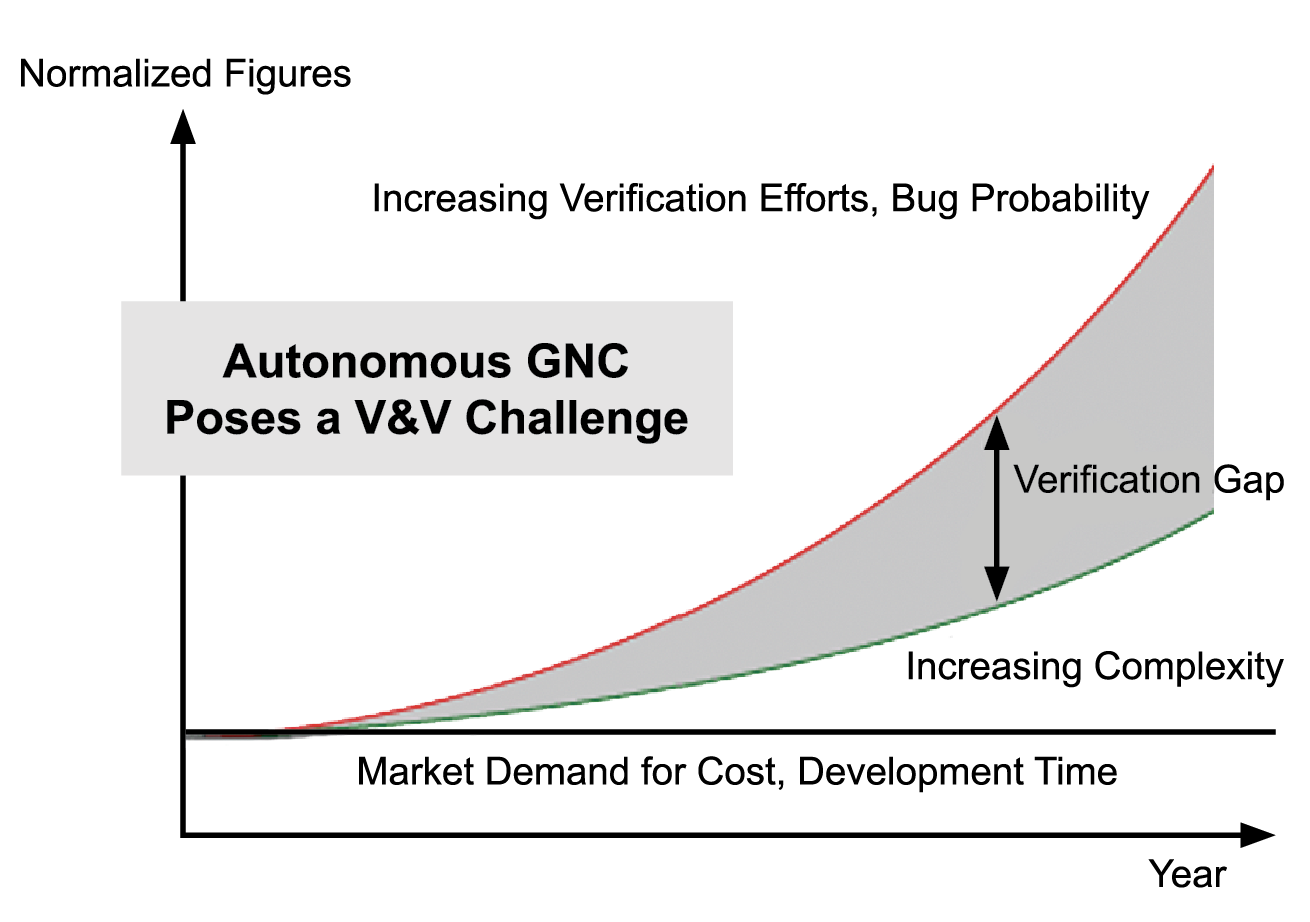
As a consequence, the trend in GNC systems for NASA’s aerospace platforms will be toward more complex implementations as mission requirements for higher levels of performance and for autonomous operations become more demanding as well as more prevalent. Uncertainty and nonlinear coupling add to this complexity, potentially leading to a significant gap in the capability to perform the necessary prelaunch verification and validation (V&V) work. This trend in growing GNC system complexity is one that the NESC GNC Technical Discipline Team (TDT) has observed and considered. Dealing with system complexity is a present and growing challenge for NASA and its industry partners. Verification is a very costly phase of the mission life cycle. Consider that on a typical spacecraft project, only about 20% of the total time is spent on actual design while the other 80% is used for planning and executing the V&V activities necessary to certify systems for flight readiness. There is a need for V&V tool development and education to manage the risks of flying increasingly complex GNC systems. Likewise, there is a need to narrow the gap between the new non-traditional V&V tools and those currently in use by industry. Recognizing these GNC community-of-practice needs, a subset of the NESC GNC TDT has performed significant discretionary work over the past two years to address the V&V challenges of advanced autonomous GNC systems.
To understand, quantify, and address this gap in GNC V&V capabilities for advanced applications, several space agencies including NASA and the European Space Agency (ESA), DLR (Deutsches Zentrum für Luft und Raumfahrt, the German Aerospace Center), ONERA (Office National d’Etudes et de Recherches Aérospatiales, the French Aerospace Lab), and France’s CNES (Centre National d’Etudies Spatiales) sponsored a series of seminars culminating in a GNC V&V workshop. This effort began with a series of talks by GNC subject matter experts that were presented in the autumn of 2020 and spring of 2021. Following the seminar series, a workshop was conceived to establish a common understanding of the issues between academia and industry, and between the different national space agencies.
Three major themes emerged from this first-of-a-kind inter-Agency GNC V&V workshop. The first was education of the GNC workforce about existing tools and methods that can be used for V&V of non-traditional GNC algorithms. The workshop identified several techniques including genetic programming, reachability analysis, nonlinear stability analysis, mu-analysis, and others for which applications and toolsets with a high readiness level exist, and whose use in the GNC community could be expanded with training and education.
The second theme was development of new GNC V&V tools and analysis methods, targeted to meet existing needs and gaps. These include tools for nonlinear/hybrid systems with temporal specifications, tools to establish formal reasoning for hybrid (continuous and discrete) systems, increasing the efficiency of Monte Carlo simulations, and the leveraging of existing tools and techniques, such as Model Predictive Control, which are widely used in automotive and process control applications and other non-aerospace enterprises.
The third theme was creation of a set of GNC V&V benchmark problems for the GNC community of practice to solve. Example problems were discussed in presentations. Areas in which useful benchmark problems could be developed include launch vehicle flight control, high-precision space observatory pointing, reentry control, rendezvous and proximity operations, robotics servicing and assembly, active vibration control, and others.
It is clear that use of Autonomous GNC will pose a significant V&V challenge. New V&V methods, tools, and processes will be needed to build trust and accomplish pre-flight certification. The NESC GNC TDT is currently reviewing and processing the outcomes of the workshop and seminar series to formulate V&V gap-filling strategies and to prioritize V&V tool and process investments. One final observation that emerged from the workshop: NASA’s Advanced Air Mobility Mission will depend on transformational tools & technologies, many from the GNC engineering discipline, to build trusted autonomy for safety-critical aeronautical flight systems. This is technology that can very likely be leveraged for space mission applications. For more information, contact cornelius.j.dennehy@nasa.gov.
Summary Point:
- NASA and ESA GNC engineers share a common technical language and, most likely, a common vision for Autonomous GNC on future missions – Why not collaborate since we should be aligned in a common purpose to build a new ecosystem?
- We have common driving interests in faster system implementation timelines and dramatically reduced mission operations support requirements. Also seeking ways to build in agility, adaptability, and on-the-fly system reconfiguration.
- Challenge will be for our GNC community of practice to learn new, non-traditional skills and techniques. Reliance on inter-disciplinary approaches and extensive system integration to effectively harness several new technologies.
- Use of Autonomous GNC will pose a significant V&V challenge. New V&V methods, tools, and processes will be needed to build trust and accomplish preflight certification.
- Transformation process we are witnessing now towards Autonomous GNC is ad hoc, which is acceptable since formality will come once the community has done some of the initial hard lifting to accomplish some early successes.
