























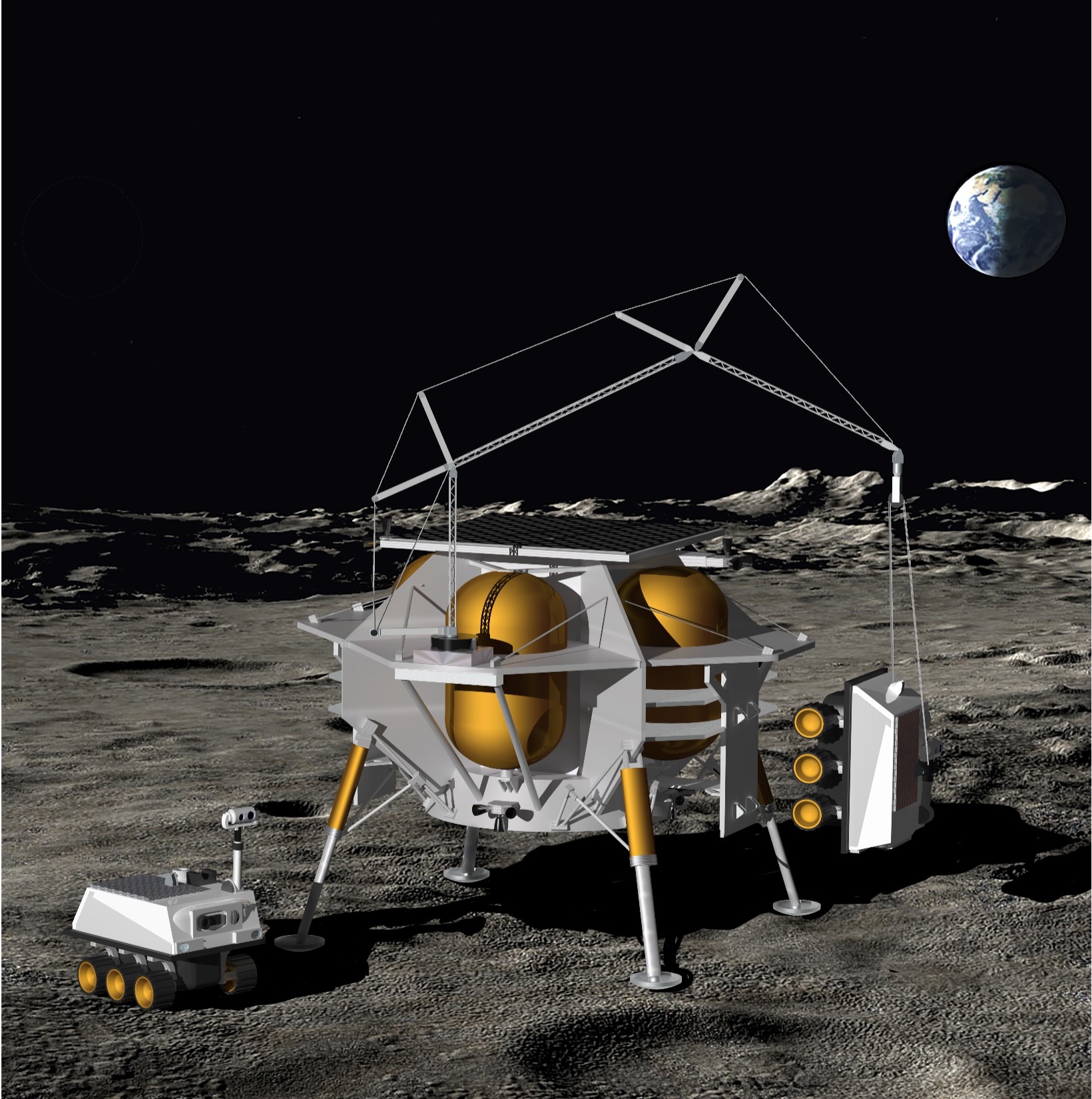
New software under development will enable autonomous operations of NASA’s space crane, the Lightweight Surface Manipulation System (LSMS), making surface operations on the Moon and Mars safer and more efficient. The project is an early career initiative, giving relatively new engineers a chance to take the lead on an exciting project.
The LSMS currently operates similar to a video game, with a controller or joystick that requires constant input by a human operator.
“But when we go to the Moon and Mars, we want our robotic agents to run with supervised autonomy,” said Julia Cline, who became an engineer at NASA’s Langley Research Center after earning her doctorate. “To do that, the LSMS would need situational awareness, a control system that has sensors and cameras, and a way to provide feedback and make decisions on how to operate.”
The control software under development will enable the crane to detect mass, center of gravity, size, and location of objects it is grasping, enabling autonomous payload handling, including lifting items off of landers. The software also will allow the crane to investigate how to move rocks and regolith (dirt) out of the way for building landing and launch pads, and habitats, and to determine whether it’s safe to make a maneuver or there are obstacles in its path.
The control software also will be scalable for use with different size cranes and will allow the crane technology to be able to integrate with any lander or surface asset, such as a rover.
“We want LSMS to be a commodity device – not just something that can be used with one lander,” Cline said “As part of the modular, plug-and-play interface, the software needs to be designed to act as a translator between the lander and the LSMS.”
In addition, the technology to make space cranes autonomous could be used to advance construction technology on Earth.
The team still is in the algorithm writing stage but plans to start lab demonstrations next year using an LSMS prototype. During lab tests, the team will introduce challenges to see how the system reacts in a controlled environment where humans can jump in if anything unexpected happens.
The software development project – called Lightweight Surface Manipulation System AutoNomy capabilities Development for surface Operations and construction (LANDO) – is Cline’s brainchild.
Cline joined NASA in 2019 after earning her PhD in aerospace engineering at the University of Texas at Arlington and completing a post-doctoral fellowship at the U.S. Army Combat Capabilities Development Command Research Laboratory. She felt drawn to NASA’s open atmosphere, and the exciting field of in-orbit servicing assembly and manufacturing.
“John Dorsey told me if I was ready to learn, I should come on down,” she said. “That it’s OK if I didn’t know everything because they would teach me what I needed to know about in-space assembly.”
LANDO is a partnership between NASA Langley Research Center, Astrobotic Technologies, Inc., and the Virginia Tech Field and Space Experimental Robotics Lab. In addition to Cline, the NASA LANDO team includes Langley early career researchers Iok Wong, Walter Waltz, Dominic Bisio, Timothy Scott, and Matthew Vaughan. The team is mentored by autonomous in-space assembly subject matter experts at Langley John Dorsey, Tom Jones, Bill Doggett, Danette Allen, and Patrick Cosgrove.
LANDO is funded through the Early Career Initiative in NASA’s Space Technology Mission Directorate (STMD). STMD supports and develops transformative space technologies to enable future missions. As NASA embarks on its next era of exploration with the Artemis program, STMD is helping advance technologies, developing new systems, and testing capabilities at the Moon that will be critical for crewed missions to Mars.


