



















Jay McMahon
University of Colorado, Boulder
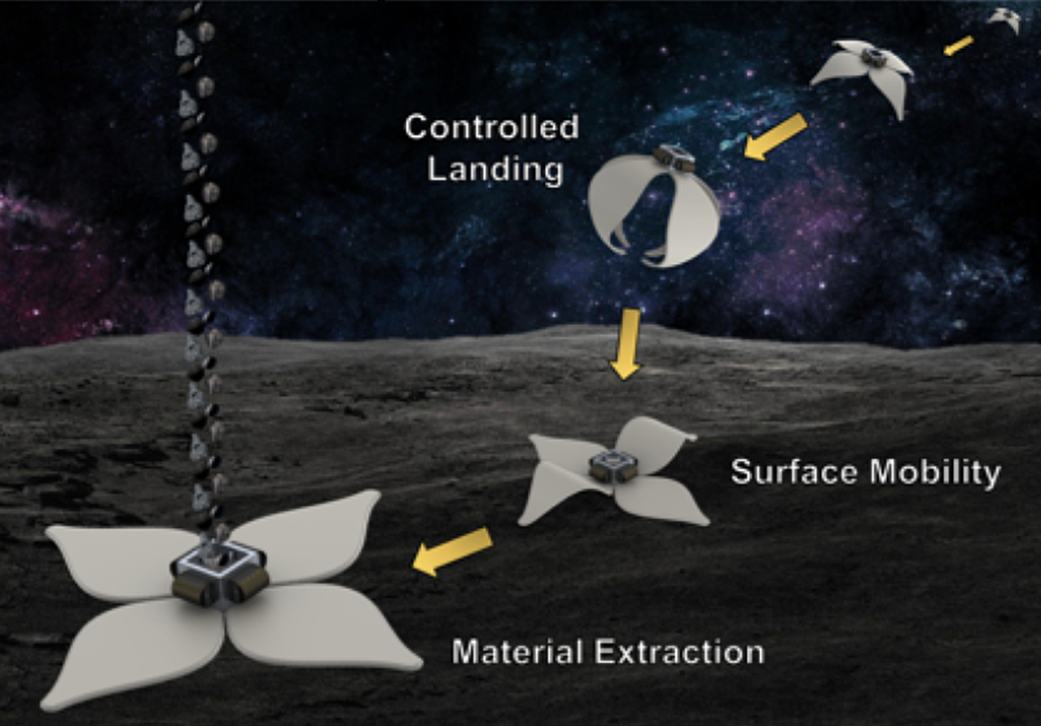
This proposal seeks to continue development of a new type of soft robotic spacecraft that is specifically designed to move and operate efficiently on the surface of, and in proximity to, rubble pile asteroids. These spacecraft are termed Area-of-Effect Soft-bots (AoES) for their large, flexible surface area that provides three key advantages for this environment: it conforms to the surface to provide adhesion-based anchoring; it enables surface mobility via crawling without pushing itself off the asteroid; it enables fuel-free orbit and hopping control using solar radiation pressure (SRP) forces. The central bus of AoES contain a mechanism to liberate material from the asteroid and launch it off the surface. The purpose of these radical new robots is to enable a realistic and robust in-situ resource utilization (ISRU) mission to a near-Earth asteroid (NEA). In this concept, one or more AoES would be deployed from an orbiting spacecraft to the surface of the target asteroid. The AoES will move after landing to find and liberate desirable material, which is then launched from the surface for collection by the orbiting resource processing spacecraft. In Phase I, significant strides were made across a variety of topics to prove the basic feasibility of the AoES concept. Most significantly: an initial AoES design and model was created; HASEL actuators will be used in the soft actuation surfaces; AoES will incorporate electroadhesion to ensure sufficient anchoring; orbit and hopping control with SRP is feasible for the AoES design. The proposed Phase II study will build on the momentum of the Phase I study to continue reducing the chief risks of a feasible AoES design. To this end, we will address the following primary objectives:
- Testing of adhesive anchoring with asteroid regolith simulants
- HASEL actuator refinement for asteroid environment
- Regolith digging/launching system design and mechanics
- Thermal control to ensure operational soft robotic material temperatures
- Robust navigation and control for landing and hopping
- Landing simulation – investigation of energy absorption
- Testing and demonstration of actuated soft robotic legs
Addressing these objectives will result in the advancement of two areas of research with a potentially massive future impact: asteroid mining and soft robotics in space. The work will be carried out by a collaboration between the labs of PI McMahon and Co-I Keplinger, who invented the HASEL actuators. This project will also support a 2-year Aerospace Graduate Projects class of 20+ MS students who will carry out system design, manufacturing and testing tasks. Development of AoES has the potential to drastically improve the capabilities of harvesting water and other resources from the variety of small, plentiful, easily accessible NEAs – enabling further exploration and economic profit in the solar system.



