



















Transcript
Vandi Verma: Hi, I’m Vandi Verma. I’m the chief engineer of Mars Perseverance robotic operations, and the deputy section manager of the Mobility and Robotic Systems Section.
Narrator: Another description for Vandi is “Mars rover driver.” She’ll be our driver today, and we’re in good hands. Vandi has a lot of experience driving rovers on Mars.
Vandi Verma:I started driving the rovers in 2008. I was actually in graduate school when the MER rovers Spirit and Opportunity landed, and they were supposed to last 90 days and I didn’t think I would ever get to drive them, but because they lasted so long, I did get to drive the rovers. Opportunity was the first rover I drove, and I also drove Spirit. And since then, I’ve been driving rovers on Mars with Curiosity and now Perseverance.
[00:52] (music)
Narrator: Driving a Mars rover isn’t like sitting behind the wheel and tapping the gas or brake pedal with your foot. It’s not even like driving a remote-controlled toy car, using a joystick or other hand-held device to make it scoot back and forth. A Mars drive starts on Earth, with a team of scientists and engineers developing a list of actions they want the rover to take. The rover driver then uses this list to develop a plan.
Vandi Verma:We have graphical tools in which we sketch the drives, and then we translate it into commands that tell the spacecraft how to drive, and there’s hundreds and hundreds of commands for a drive that are typically sent. And then once we’ve reviewed those, we simulate them. We have simulations that model the terrain and we see what the outcome will be.
Narrator: Testing the commands on a simulated rover in a computer, before they’re sent to the actual rover on Mars, helps determine what actions work best. A Mars rover driver is also called a “rover planner,” since so much of the task is figuring out, long before the wheels start spinning, where a rover can go and how it’s going to get there.
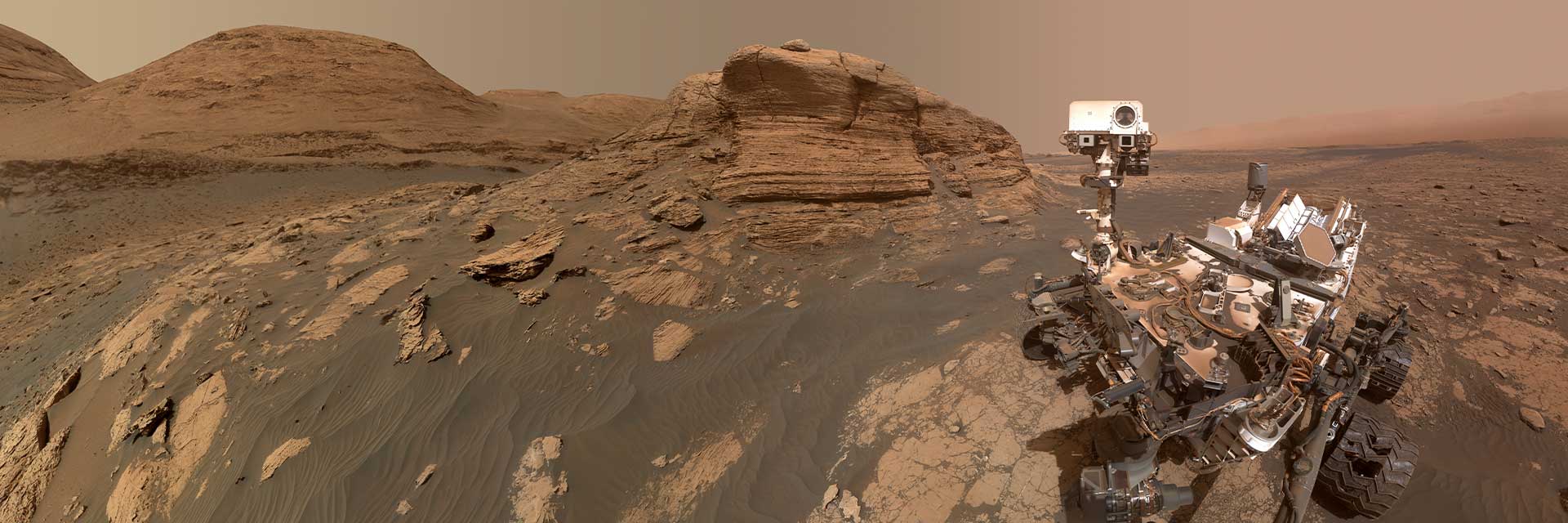
[2:09] Mars has no roads, so a rover driver has to study the flow of the landscape, noting uphill or downhill slopes, rocky versus smooth ground, and potentially mission-ending hazards like deep craters or sand traps. Scoping out the environment this way is possible thanks to satellites that map Mars from above, and photos taken at ground-level by the rover. This data is stitched together into an immersive view that the rover drivers see through 3D goggles.
Vandi Verma:The cameras are getting so great that it’s almost like standing on the surface, looking from the perspective of the rover, and that really gives you a sense of the terrain.
(music)
[2:56] Vandi Verma:Mars is so vast, and it’s got such amazing geology. And when you put on the goggles, you really can see how much texture there is in the terrain, and it really comes alive. The image might look like relatively benign terrain, but when you put it on, you can just see how dramatic the geology is. At the same time, none of the features that we recognize and are familiar with are there, so there’s no context. So when you’re looking out, something can look just like flat terrain. And as soon as you put on the 3D glasses, you can see that there’s actually an edge of a crater there.
Narrator: Once a final plan is established for the virtual rover, the action list is packaged into a computer file, and then transmitted as electromagnetic waves that travel from radio dishes on Earth to an antenna on the Mars rover.
Vandi Verma:Because Earth is so far from Mars, we don’t actually drive the rovers in real time. It can take anywhere from 4 minutes to 22 minutes just for a one-way light time signal.
[4:04] Narrator: Not only are the commands delayed, but the action happens out of sight. You can’t be sure anything happened until data and images taken by the rover are sent back to Earth, confirming whether or not the rover performed the items on the list.
Vandi Verma:Once we’ve sent those instructions to Mars, typically we’ll go off and the rover is executing the drive, and by the time it’s done, we come back, get the images, and continue on to drive the next day.
To make fast progress, we send commands to the rover to execute a drive for an entire Martian day, which we call a “sol.” So we’ll know what destination we’re trying to get to, and we’ll plan all of the sequence of steps to get there. We have to anticipate all of the things that could go wrong.
Narrator:Rover drivers do more than drive, they operate all parts of the rover. So, for instance, they’ll make sure a rover’s arm is placed in the right position to drill into a rock. Considering what could go wrong with every move a rover makes, constant worries can cast long shadows in a rover driver’s mind.
[5:16] Vandi Verma:We never stop thinking the “what ifs.” Everybody would be gone, we’ve sent instructions to Mars, and we’re still trying to figure out, “What if this happened?” Right? Because you’re still like, “I haven’t exhausted all the possibilities.” I did enough that I was comfortable, but we’re still out there, (laughs) looking at possible things that could happen. You constantly keep thinking about it, thinking about what will actually end up happening, and if you missed something. You know, we never leave things so that just one person can do it, but the scope of capability you are controlling could damage irreparably some critical aspect of the mission.
But it’s actually not a stressful job. (laughs) It’s very Zen. When you’re in the mode, you’re very focused. You definitely, by the end of the day, you are tired, but it’s almost like having this day where you were completely in flow and in the element.
[6:15]When you’re working on Mars every day, and you’re looking at the terrain, the images, they can transform you to be there, and you feel you’re there. But then you walk out, and at the times of the year when you can see Mars, you just realize, “Wow, it’s a dot in the sky. It’s really far away!”
(intro music)
[7:06] Narrator:Welcome to “On a Mission,” a podcast of NASA’s Jet Propulsion Laboratory. I’m Leslie Mullen. The first seven episodes of this season provided a timeline of 25 years of Mars exploration with the rovers Sojourner, Spirit, Opportunity, Curiosity, and Perseverance, as well as the Mars Helicopter, Ingenuity. The remaining episodes of season four will highlight different challenges of operating rovers on Mars.
This is episode eight: How to Drive a Mars Rover.
(music)
Narrator:Driving directions and other instructions are sent to the rovers from Mission Control, a cool and quiet room at JPL. The large space doesn’t use overhead lights or have windows to the outside. The darkness is punctuated by constellations of colored lights, and computer graphics displayed high above showing the status of data silently streaming through the Deep Space Network, an array of radio dishes on Earth that connect with spacecraft traveling beyond the Moon and across the solar system.
[8:20] The endless night of Mission Control and other dark rooms at JPL helps rover drivers stay on “Mars time,” as do clocks that show the local time zone of the rover.
Vandi Verma:We typically do Mars time for the first few months of the mission, because that’s when we’re doing checkouts and really have the rover in the environment for the first time. So right when we land, typically the shifts would start 2, 3 a.m. and we would be working through the night. And you’re coming in the next day, you’re going in at a later time.
Narrator: While on Mars time, a rover driver will start work about 40 minutes later each day, because a Mars day is about 40 minutes longer than an Earth day. This daily schedule shift means those on Mars time become ever more adrift from Earth.
[9:08] Vandi Verma:So we do get a lot of training on how to manage the circadian rhythm. Like we don’t have sunlight around Mars time, because if you see the Sun and it’s supposed to be night time for you, it’s very disorienting. So you try to keep your rooms dark, and you can then look at the clock and have that be your guide. And you eat breakfast whenever it is your Mars time breakfast, whether it be Earth time 10 o’clock at night, it’s breakfast time.
But the challenge with that is always just how long it goes on. And we often do it on an average of about 90 sols – 90 Martian days. The reason we do it for a limited time is most people have other people on Earth they need to interact with! (laughs) So, you know, I have little children, and it’s very hard on your family because you’re out of sync with the rest of everyone on Earth.
[10:03] Narrator: Living on Mars time while immersed in 3D images of the Martian desert might seem close to being there, but rover drivers don’t experience the more difficult aspects of living on this alien planet.
Vandi Verma:We look at the images and it looks a lot like Earth, but it is actually a lot harsher. We forget just what the rovers are going through every single day – just the fact that they survive a night is a miracle because it’s such a harsh environment. Almost every night, the temperature plummets. So the extreme temperature creates a lot of stresses.
(sound effect: dust)
Vandi Verma:And dust on Mars is prevalent everywhere. In fact, on the surface, the dust can impact some of the measurements we take. So we actually have on Perseverance a little tank in which we carry nitrogen gas, and we puff away the dust. But that dust can get into sensitive instruments. And a lot of our cameras have covers, so when we land, that’s particularly one of the events where we blow up a lot of dust. If the lenses were dusty, we just wouldn’t get such crisp images.
[11:08] And some of the imagers, like the one at the end of the robotic arm which gets placed in close contact with surfaces, we open and close the cover every time we place it. We do the same with all of the delicate instruments – at the end of the day, when we’re done with the activities, we’ll close the covers.
(sound effect: wind)
Vandi Verma:We also have dust storms. And dust devils, they just blow away the dust. We’ve actually caught a lot of them on camera on Perseverance. They just photobomb images, we’re not even trying to catch them (laughs). Sometimes we are, but other times, just happens in the background of some image we happen to be taking of rover hardware. So there’s a lot of dust blowing around and that definitely has an impact. And if humans were there, it would be a huge element. It’s a very important part of living on Mars.
[11:58] In fact, at Pahrump Hills with Curiosity, we were doing what we called a walkabout – initially we just took pictures, and we had actually brushed some surfaces, and then we came back. It might just have been like two weeks later, and it was completely covered over in dust, the areas we had cleaned. And so, it’s that quick.
Narrator:The rovers aren’t on Mars for long before they’re completely coated in fine powdery dust. This was a problem for the solar-powered Sojourner, Spirit, and Opportunity rovers, but, for the long-lived twin rovers Spirit and Opportunity, the occasional dust devils would blow their solar panels clean enough to keep generating power. The larger Curiosity and Perseverance rovers run on an RTG, a radioisotope thermoelectric generator powered by plutonium, so the dust doesn’t drag their power down.
Over the years, as the design and function of Mars rovers changed, rover drivers had to learn how to drive the new models. But all the rovers use the same basic six-wheeled mobility system.
[13:03] Vandi Verma:All six wheels can drive, but only the four outer wheels steer. And we can do a point turn, so we can toe in all of the wheels and just turn about. Because the rover can’t really crab – which is driving completely sideways – because the middle wheels don’t steer, we tend not to go beyond 90 degrees.
We do drive individual wheels when we’re trying to do something unusual, but generally we command what are called “arcs.” So it’s like a curvature of an arc we are trying to do. And the rover, it’s computing how much each wheel should turn in order to follow that arc. We’re like, “Go to that point,” and then the rover will drive to it, and it figures out how to compute all of the arcs at every step to get to that waypoint.
When you don’t have all six wheels to drive and four wheels to steer, you’re limited with what you can do. With the drive wheel stuck, that wheel’s not turning, but with the steering wheel stuck, it’s actually got a different curvature going, so there’s very different aspects of the problem.
[14:09] (sound effect: stuck wheel and robot beeps)
Vandi Verma:Opportunity had a steering wheel that was toed in and it was stuck. And when you command the rover, it thinks it’s turning that wheel, but it’s not actually turning. And so, you’re going to get a different outcome of the drive than what you command. When we would simulate the drives with the toed-in wheel, we had to compensate to drive such that, in spite of the toed-in wheel, it’s going to end up getting to where we want. But in the simulation, it didn’t know that, so it would look like it was literally driving spirals and donuts. (laughs) Really bizarre simulations. And then as a result, we actually ended up updating our tools to compensate for that.
(sound effect: dragging wheel)
Vandi Verma:And when one of Spirit’s wheels got stuck, it was dragging it along.And as a result of it, on the future missions, we have a way in which we can more like freewheel the wheel, so that if it does get stuck now, it just kind of rolls along instead of act like a dead weight. So these are things where, from being on Mars for so long, you start to see the failure possibilities. But now that you’ve encountered them, we have strategies for getting around them.
[15:25] Narrator: Another adaptation to improve rover performance is the traction of the wheels. Every generation of rover has left a different footprint on Mars. JPL engineer Kobie Boykins, who has worked on all five rovers starting with Sojourner, which landed in 1997, helped manufacture the metal spikes that studded that rover’s fist-sized wheels.
Kobie Boykins:There was a lot of different iterations of how these wheels would look. We then were really trying to figure out what is the best way to interact with a rock or the soil so that we can climb. And we thought at the time that, yeah, we might be able to drive around rocks, but it might be easier to drive over some. And so, we wanted to design that into the vehicle so that we would have that capability, if we needed it. And the mobility system, just by design, is able to go over a rock that’s twice the diameter of the wheel, which is really pretty good.
[16:19] And we thought, “Okay, we’re going to need some traction, because you still need to be able to put torque to the ground to propel yourself forward.” So we had to get good traction on the rock, and so that’s where these sort of teeth or claws, or some torture device that the wheel looks like, was created. And we were trying different geometry to see what gave us the best traction and would last the longest, and would have a lot of durability.
Narrator: Spirit and Opportunity, which arrived on Mars in 2004, were the first rovers to travel far away from their landing site. Their wheels had straight horizontal treads to make tracks over a greater variety of terrain.
Vandi Verma: We have designed our vehicles so that they’re capable of handling these off-roading conditions. And if it’s compacted soil, we can actually get really good traction because we design our wheels with these treads that can grip on it. But the things that are really challenging for Mars rovers, the biggest one tends to be sand, and Mars is a very sandy place.
[17:20] (sound effect: driving on sand)
Vandi Verma: The biggest dunes are often harder to navigate, but depending on which side the wind is coming, the sand can just be more like talcum powder and harder to get traction in one side of a ripple than on the other side. So these are things that we work with the science team, and together we’ll try to understand how navigable that is.
The wheels, often when they’re turning, and our encoders are reading as if the wheels are turning, turning, but actually could just be digging deeper into the same spot. And this happened with Opportunity at this location we ended up calling Purgatory, where it covered like 50 meters of a 90-meter drive, just digging itself deeper and deeper and deeper.
[18:07] So Opportunity got embedded in Purgatory. And the way the rovers are designed, we drive forwards, but there’s actually more torque in the backward direction, so turning the wheels and just extricating backward worked very well, and Opportunity continued for almost 10 years after that.
Narrator:Spirit wasn’t so fortunate after it broke through a thin, hard crust and became mired in the soft sand beneath. To try to get the rover out, the team tested maneuvers on a near-duplicate rover in a testbed on Earth. “Free Spirit” became a rallying cry during these many months of testing, and not just for the mission.
Vandi Verma:We actually got a lot of great recommendations. People got so interested in it. We would have students and various people, they’d do drawings, show us how we could use the arm to like push the rover. (laughs) It was so great. People really wanted to help. And there was this Free Spirit campaign and we all had T-shirts and everything. The team was just so invested in it.
[19:16] Now, we didn’t want to try and make things worse. So we created in the testbed the simulated environment – we actually got diatomaceous earth, which some parts of it is used in like swimming pools, to create an environment which was somewhat similar.
Narrator: In addition to diatomaceous earth – a fine powder often used in pool filters – soil scientists added powdered clay and also the type of sand used in children’s sandboxes to create an approximation of the Mars sand that had captured Spirit. The team embedded their test vehicle into this flour-like mixture in the same way Spirit seemed to be stuck, and then tried different escape maneuvers.
Vandi Verma:So we were turning wheels different rates, whether we would move them all at the same time, whether we tried to drive forward, backward. We had these techniques that we actually called “swimming strokes,” where you’re trying to scull.
[20:09] NASA “Free Spirit” update:This is John Callas at the Jet Propulsion Laboratory with your “Free Spirit” update. Since we last updated you, we’ve begun the extraction testing here in our sandbox at JPL of our engineering rover, in preparation of actual driving on Mars with Spirit. Okay, what the team is trying to do right now…”
Vandi Verma:You try all of the different strategies, and some of them made a difference. And the ones that worked well, then we would go try it on Mars. And there, you would see certain other effects and then try to replicate them. So we were making progress, but the rate at which it was, it just wasn’t enough.
BBC news report:Spirit never did awaken from the long Martian winter, and last month, NASA finally closed the chapter on this epic tale.
[20:59] Narrator:The loss of Spirit and the embedding of Opportunity were partly caused by soft sand becoming so compacted in the spaces between the treads, the wheels lost traction. To prevent this from happening to Curiosity, that rover’s wheels have widely-spaced zig-zag treads, called grousers, that shed sand more easily.
But Curiosity had an added stress on the wheels that the previous rovers never faced. Sojourner, Spirit and Opportunity all arrived on Mars tucked inside a large airbag that bounced on landing. When the much larger and heavier Curiosity rover arrived on Mars in 2012, it was lowered down on ropes from a jetpack until its wheels touched the ground.
Vandi Verma:So you have to design the wheels for this multi-purpose. They really have to be able to take that landing. And yet, you know, everything on Mars, you have to minimize weight in order to make it into the launch vehicle. So the wheels, even though it’s such a large vehicle, when you look at the Curiosity wheels, people use the analogy that we’re sort of driving on beer cans. They’re not very hefty.
[22:09] Narrator: Curiosity’s thin aluminum wheels had to tip-toe around sharp rocks in Gale Crater.
Vandi Verma:There were some holes starting to appear in the wheels. We were starting to see tears, and grousers breaking. And the reason is that there were rocks – the scientists call them ventifacts – they’re small rocks, but they were very spiky. So we were avoiding these ventifacts. We would mark them all out in our simulations and in our terrain measures, and then plan this drive. It looked really funny, as if it’s going through a little obstacle course avoiding really tiny looking rocks.
But then we, you know, as we always do, we developed new technology called traction control. Because we realized what was happening was, we would come upon these rocks, and the wheel would encounter it and the back wheels would almost push that wheel into that rock, creating that stress point. So we started to drive the wheels at different rates so that the wheel that ended up hitting the rock would move faster up and over, and the back wheels would slow down, so they’re not actually pushing that wheel into that rock. And that really made a huge difference. And the wheels are still going. They’re doing pretty well.
[23:20] (music)
Narrator:The Perseverance rover, which arrived on Mars in 2021, has thicker wheels than Curiosity that are less vulnerable to sharp rocks. And deep wavy cleats on the outside of the wheels provide a better grip on a variety of surfaces.
Just as the wheels have evolved based on past experiences, so has a rover’s ability to decide when to keep rolling.
Vandi Verma:We’re going to Mars because it’s a place we want to know more about. And we learn from all of these missions, and have made updates. So as a result of the issues that we had with the embedding, we developed a new strategy called visual odometry.
[24:07] So when you’re turning the wheels, how do you differentiate between when it’s turning and just digging deeper and turning and moving forward? So we take an image and then we command the rover to drive forward and take another image. And we know exactly how much we told it to go forward. In the image, we track known features, so we know this particular rock was in front of me. It should be behind me once I’ve covered one meter of driving distance. If it isn’t, and it’s exactly at the same spot, I actually haven’t moved. So we use this technique as a way to tell us if the rover is embedding.
And the challenge with that, with the previous rovers, was the rover has to think. It has to do a lot of image processing. It’s got to take this image. It’s got to process it and do computer vision on it and come up with the answer. And it would take time. But then we just found it so valuable that on Perseverance we’ve made it so fast. We have a dedicated computer – a second computer that just does the image processing. And it’s so fast that we don’t even have to think about it.
[25:12] We also add a lot of other capabilities, like thinking while driving, where the rover can do the thinking while the wheels are still turning. So it’s resulted in us using these techniques to catch very quickly if we even start to get embedded. And it allows us to drive bravely into areas where there is some risk, but if we aren’t sure, we can do these things called toe dips very carefully.
Narrator: While each new rover is better adapted to exploring Mars than the ones that came before, operating them has, in some ways, become more difficult. Here’s Rob Manning, JPL’s chief engineer who has worked with all five rovers.
Rob Manning:Curiosity and Perseverance are really complicated vehicles. Your head can get very sore learning about them. Whereas Spirit and Opportunity, once you figured out how they worked, it’s like, “Oh, I can figure out this.”
[26:08] There’s a reason for that. We actually worked hard to make them relatively easy to understand because they were designed for 90 days on Mars. We didn’t think they’d last that much longer than that, maybe 110 sols – Mars days, I should say, sols. And the reason for that is because we were expecting the dust accumulation to be such that it wouldn’t have enough energy to operate, particularly as winter closed in.
So how do we get our money’s worth, so that these vehicles are operable every single day? Well, one way to do that is to make the vehicles easy to understand and operate. And fairly autonomous, with enough self-awareness inside the vehicle itself so that it wouldn’t allow for stupid things to happen. And if it does happen, for example, if you did a silly thing with a drive and you caused wheels to turn in an angle that it wasn’t designed to go, it doesn’t mean that you just shut the whole rover down. The rover says, “Well, I’m not going to do the drive, but I’m going to continue with these camera pictures. I’m gonna continue taking this imaging or taking this other sensor data and just continue going on that in parallel. And then we’ll phone home and let them figure out what to do about the drive later,” because we would often ask our rover to do a whole bunch of different things during the day, and we didn’t want one thing bad happening in the morning to ruin the whole day.
[27:13] Because you’re trying to make sure that every day of those 90 sols paid off, and we felt that time was fleeting. But these vehicles kept on going, in addition to the dust cleaning events that ended up scouring and sandblasting, cleaned the solar panels once in a while, which really rejuvenated their power supply. That was a huge savior for those missions.
The other thing was, is that because it was relatively operable, you can have generations of new engineers, and many of them fairly early in their careers, work on Spirit and Opportunity, and learn the constraints of a vehicle fairly quickly. And you can learn on the job and it’s manageable. They do the same thing with Curiosity, but it’s a much longer lead time for learning. And it’s really hard to do anything that hasn’t been done before, because you don’t know enough about it to trust what you’re asking it to do. Our more complex vehicles, like Curiosity, one bad thing could actually sink the whole day.
[28:09] Curiosity, because it had redundancy, and it had its own power supply, its RTG, it wasn’t a ticking time bomb waiting for the dust to kill it. We could afford to err on the side of just stopping. And so, the vehicle tends to be a little bit finickier, and stops easier. And it won’t continue doing things, partly because it’s also hard for it to know, like, “Well, I could continue doing that, but I’m not sure if this problem I just heard this morning, whether that’s going to affect that or not. So I better not do anything.”
Narrator: Rover drivers often help build the rovers, and so become acquainted with many of the nuances of the vehicles long before they’re on Mars.
Vandi Verma:I personally, for example, have written some of the robotic software that runs on the rover. I work on a lot of the robotic autonomy for the robotic arm. So you come in with some background on the rover. And typically, most of us, now that we’ve had so many rovers on Mars, also had prior experience from previous rovers.
[29:06] And you work with different people, but there’s a lot of trust and working together as a team, which is really the fun part. And it’s not just the rover drivers – you work with the science team; you work with different parts of the operations. So there’s a larger team and everybody knows an aspect of it really well. And when you’re trying to solve a puzzle, you harness all the expertise in all the different areas to, together, come up with the answer.
Narrator:The more experienced rover drivers train the next generation. For the latest rovers, this training can take a year or longer.
Vandi Verma:We’re always updating our processes of how we train the rover drivers. And the way we do it is there’s some classroom sessions where you’re teaching what you can about the rover and other sort of areas that are relevant.
[29:57] It’s very similar, I say, to training to fly an airplane, where you do a lot of reading, and then you might fly a simulator. We do that, where we have Martian terrain in which we’ve already executed drives or robotic arm motions or other placements, and we’ll present them as problems to the new set of trainees and ask them to solve the problem and to plan the drive. Now, of course, there isn’t an exact one answer, but you want to make sure you’re thinking about the right things.
But in the end, you really have to get behind the wheel. And it’s sort of like flying solo, you start to fly where you’re in the airplane with an instructor just watching them. So we call these shadows. So you let them have the hands on the wheel and you’re watching over. And then slowly they do more and more of it.
Narrator: Vandi is also a private pilot, and she sees another similarity between flying a plane on Earth and driving a rover on Mars.
Vandi Verma:I always thought when I was flying, especially small single engine planes, they’re so clumsy on the ground. Like when they’re taxiing around, they’re not great. They’re amazing in the air, because that’s what they’re designed for.
[31:06]Similarly, our rovers, testing them on Earth is challenging. There are things that work better on Mars because they’re designed for Mars, and Mars gravity is different. Mars atmosphere is different. So they’re better in the environment that they were designed for.
(sound effect: airplane)
Narrator:Vandi’s interest in flying began when she was growing up in India.
Vandi Verma:I was born in a state called Gujarat, which is sort of, when you look at the map of India, it’s like the little Pac-Man part. And I grew up around airplanes. My dad was a pilot, so I was always fascinated with airplanes.
Narrator:As an Air Force pilot, Vandi’s dad was frequently transferred, and so the family moved from town to town. In addition to airplanes, Vandi also was excited by space exploration.
Vandi Verma:When I was really little, somebody gave me this book on space. And it had pictures of all the planets and talked about space exploration. It was more fascinating than all the fairy tales. And I was like, “This is real!” But I didn’t really know how to connect to anything from where I was to outer space.
[32:13]But then, at one point I started doing, just in a summer school, some programming. And at that time, we didn’t have access to like computers where you could just sit and work on them. We had to go to a center and work. And I was fascinated, and so, I did my engineering school.
And then, so much of what I was interested in, in space, was happening in the U.S. And I remember reading about Sojourner in the newspaper. And I was just blown away that there was this little rover – I still remember the picture, it was Sojourner in front of Yogi Rock, and I thought it was amazing that there were people working on a rover on another planet. I was like, “Wow, this is the coolest thing.”
Narrator: After Vandi got a bachelor’s degree from Punjab Engineering College, she came to the U.S. for her advanced studies. A class at Carnegie Mellon University called “Mobile Robot Programming” got her even more fired up about rovers.
[33:13] Vandi Verma:You would learn the different algorithms, different aspects of robotics. But then there was a project we had to do where there was a competition. We had these robots that had to navigate a maze and collect this theoretical gold to get enough points. So you would learn the theory and then get to apply it.
And I got so into it, I think I spent all my spare time, and my team ended up winning the competition because we were so… like we would spend all our nights, weekends, everything on the (laughs) on the robots.
(sound effect: robot sounds)
Vandi Verma:And there are things that you do when you’re learning robotics, and especially the controls aspect, where you’re like, “That’s not common sense. Why are you doing that?” And you realize, “Well, it’s doing exactly what I programmed it to do.” So I really enjoyed that aspect, trying to sort of embed in the machine the intelligence.
[34:03] And then the exploration. Robots can go to parts of the universe that are much farther out, ahead of humans because they don’t need the kind of resources. And so they’re really, really great for exploration, and I’ve always been interested in exploration.
Narration: Vandi explored far-flung corners of the Earth as part of her robotic studies.
Vandi Verma:When I was doing my thesis work, one of the first robots I worked on was this Nomad robot which was searching for meteorites in Antarctica. I worked on some parts of the camera system for it. And then in the Arctic, there was a rover called Hyperion, which was solar powered and doing Sun-synchronous navigation. And I worked on some of the fault protection aspects – when things don’t go according to plan, how does the robot respond to that and still try to recover and accomplish the mission?
(sound effect: strong wind)
[34:59] Vandi Verma:The environment in most of these places,it is harsh, because if you saw growing grass or trees, it really wouldn’t be an analog for the sort of environment we’re looking for. It is very hostile, and yet it is beautiful. When you work in a Mars setting, you really appreciate Earth a lot as well. You start to realize this planet is amazing and so unique.
And you start to realize, even on Earth, we have places that are hard for us to grasp. One of the robots we deployed was in the Atacama Desert in Chile. And the Atacama Desert, the part we were in, is an ancient sea that had evaporated. So there was like salt – there were these popcorn formations. And the science team wanted us to get close to them and study them, but they had no sense of scale. We just weren’t transmitting that data. And they thought that they were really large, like boulders, whereas they were much smaller than that. And you start to realize how, when we see through the eyes of the rovers, we can be limited by our assumptions of what we expect to see, but it can actually be something very different.
[36:11] (sound effect: robot beeps)
Vandi Verma:When we were in the Atacama Desert, you know, we were in tents, and we would experiment with the robot during the day. And there would be occasional people who come through the desert. And they may or may not see us, but there’s a robot in the middle of this desert that looks fairly technically advanced. And the look on their faces, like, “Is this an alien? What is going on here?”
Narrator:Since Vandi came to JPL and became a Mars rover driver, she also has worked with the latest technology advancements for space exploration, including the Perseverance rover’s sidekick, the Ingenuity helicopter.
Vandi Verma:I work as a helicopter integration engineer, which is I work on the rover side of the helicopter operations. What’s amazing about JPL is there’s so much going on, and many of us, we have multiple roles. So I have, over time, been doing more of my role in the mobility and robotics organization, which looks at technology that is much farther out and missions farther out. In fact, the Ingenuity helicopter is one of the innovations that came out of that area.
[37:22] (music)
Narrator: This group at JPL is now developing flying rovers even more advanced than Ingenuity, and also looking into technologies needed for missions with multiple robots working together.
Vandi Verma:So now you can start to have robots that either have different capabilities, or are redundant so that they can be smaller, more agile and more disposable, but together they can accomplish the mission. So now, you’re talking about operating a fleet of robots together to do the mission, and how do you coordinate all of those?
And, you know, you have an element of that with the helicopter and rover, because the helicopter Ingenuity doesn’t talk directly to Earth, it has to communicate through the rover. So you always have to be aware of where they are relative to each other. So we already have two coordinating robots on Mars.
[38:14] And we aren’t doing any of the coordination autonomously onboard in this particular case. We are coordinating them, but in the future, they’ll be coordinating themselves on the planet, which is amazing. You’d have to, as you’re operating, be like, what are they together going to figure out and get up to that, you know, is not what I intended? (laughs)
Narrator:Vandi says that even as technologies grow more advanced, humans will remain a necessary part of robotic space exploration.
Vandi Verma:People often will say, “Self-driving car or self-driving rovers, why do we need people?” But at least in rovers on Mars, there’s science intent. We’re still trying to get it to do what we want to accomplish. And we are always limited by our sensors, because sending rovers to Mars, we always have to make hard choices about what do you equip it with, what don’t you, and we’re not at the stage where we can put everything we want.
[39:12] So for example, right now we do autonomous driving and the rover can look at a terrain map and detect hazards, but it does it in a geometric way. So textures like sand and other things, we still mark out areas and say, “This is an area, don’t even try to interpret through your sensors because I already know it’s an area you should stay away from.”
So all different types of intelligence, we’re going to continue to have – the parts that human intuition does really well, and parts that computing robotic machines do really well. And together, I think, that’s where it’s going to be very interesting.
(music)
Narrator: Mars rovers and other space vehicles are drivers of human exploration. It is through the rovers that we all can continue to develop a closer relationship to Mars – although perhaps not as much as a rover driver.
[40:06] Vandi Verma:You spend so much time looking at terrain. You’re trying to do this drive, and there could be this rock. I don’t think I look that carefully at any rock on Earth! (laughs) You know, there are parts of Mars that I’ve just stared at and like, you have to position the arm within millimeters with these delicate instruments. So you recognize rocks. There are rocks from Curiosity that I can just see a little edge of, and I know exactly what it is and where it is. And those are things you know very intimately.
And you know these places; you know where they are relative to each other. You know the story about how we got there, and what was challenging about it. And that’s a connection to it.
Narrator: We’re “On a Mission,” a podcast of NASA’s Jet Propulsion Laboratory. If you enjoyed this episode, please follow and rate us on your favorite podcast platform. Be sure to check out our other episodes, and NASA’s other podcasts – they can all be found at NASA-dot-gov, forward slash, podcasts.
[Run time = 41:14]