



















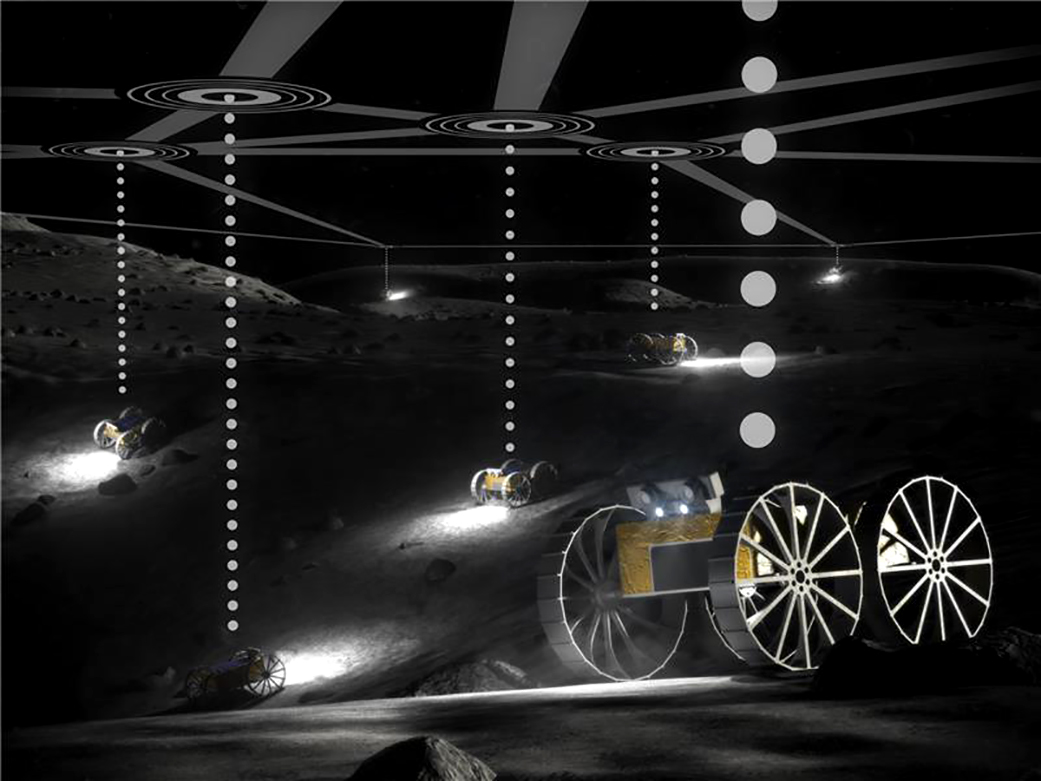

NASA’s Cooperative Autonomous Distributed Robotic Explorers (CADRE) project is developing a network of shoe-box-sized mobile robots that could enable future autonomous robotic exploration of the Moon, Mars, and beyond. The CADRE robots are the latest version of NASA’s A-PUFFER technology. Each robot contains an onboard computer with a wireless radio for communication and a stereo camera – which has multiple lenses and image sensors – for sensing the environment in front of it and capturing 3D imagery. NASA’s Jet Propulsion Laboratory in Southern California is developing the robotic scouts, designing them to explore as a group and collect data in hard-to-reach places such as craters and caves on the Moon.
“CADRE robots could complement NASA’s larger planetary robots and rovers,” said Sonny Mitchell, a program element manager for NASA’s Game Changing Development Program, which funds the project. “Multiple small, autonomous robots could cover more ground, potentially helping us map unexplored regions on the Moon.”
How CADRE Robots Work
During launch and the trip through space, the robots would be stored in a compact position in a larger lander. Once the lander arrives at its destination, the CADRE scouts would eject onto the surface. The explorers are designed to be agile and smart enough to explore extreme terrain on the Moon independently, without being controlled by astronauts or engineers on Earth.
Phoning home is a viable option for lunar missions, like VIPER, since communication signals can reach Earth within seconds. Still, waiting for ground control to review the transmissions, decide on next steps, and send back updates or commands eats up precious time. And for destinations even farther from Earth, such as Mars and Jupiter’s moon Europa, communications can take much longer, making ground-based transmissions tedious. Having robots work together and explore autonomously would greatly increase the science return of a mission.
The CADRE team is investigating multiple methods for communication between the robots and the base station (attached to the lunar lander), including a WiFi-based system. In this scenario, the robots would communicate with one another, and together they would share information and transmit that information back to a base station on the lander. The base station then redistributes all the collective data back out to the rovers. Frost calls this ‘high brain’ which entails the base station computer taking all the robots’ collective information, such as maps, putting it together and sending it out to the robots with more detailed information and compiled maps.
“There are a number of areas where this can be extremely impactful,” Frost said. “By increasing autonomy of multi-agent systems, we will reduce the number of times when the rovers have to ‘phone home’ to get ground control instructions.”
The CADRE team is focused on using this autonomy technology for small robots, but the platform could be expanded to include larger robots, base stations and other surface systems, according to project manager, Matthew Frost, at JPL.
A New Smart World of Lunar Exploration
One particular area CADRE robots could come in handy is the exploration near the Moon’s lava tubes. In these areas, the top surface layer solidifies but beneath, lava still flows, which creates caves. With multi-agents (or multiple robots working together), sending one small robot into a lava tube is possible, despite the uncertainty of it being able to return to the surface. As long as there is good signal range between the multi-agents, robots and rovers, then data can be transmitted back to the ones on the lunar surface to communicate some never-before-seen data.
Sharing knowledge between the multiple robots can be as simple as sharing position and map knowledge to improve their path planning and location of science targets. However, it can also open a new world of science exploration by sharing science sensor data as well. For example, by using a multi-agent system with ground-penetrating radar, the data from different rovers can be used to adjust the baseline between them allowing the system to create subterranean maps at different depths. CADRE multi-agents equipped with telescopes could be arranged to make a synthetic aperture, and could therefore act as a telescope. Similarly, multiple rovers armed with sensors could spread out to provide a better understanding of the lunar seismic conditions below the surface.
What’s next for CADRE?
The team will continue to advance this autonomous robotic technology through ground testing and demonstrations using lunar terrain simulant. This will include testing the ability of multiple small robots to explore an area together, while each performing various tasks, such as mapping, subsurface imaging, and recording ground motions. CADRE is being considered for a technology demonstration on the Moon as a payload on a commercial lunar lander.
Eventually, the software could be used by NASA and commercial companies to advance autonomy capabilities for all kinds of robotic exploration systems. The CADRE team aims to make the technology versatile enough that it could host and operate many different types of science instruments, even those built outside of NASA. Additionally, CADRE will be designed to allow other commercial robots to work in unison with CADRE robots.
Frost hopes CADRE systems will become a standard, commercial off-the-shelf option that enables a new wealth in space exploration. “The overall goal is to enable a new way of exploring space for years to come,” Frost said.