



















Fluid Lensing: Seeing Through Waves

Exploiting Fluids for Optical Performance
Fluid Lensing is a theoretical model and algorithm developed by Ved Chirayath in his PhD Thesis, Fluid Lensing & Applications to Remote Sensing of Aquatic Ecosystems.
Remote Sensing with Fluid Lensing Overview
The optical interaction of light with fluids and aquatic surfaces is a complex phenomenon. The effect is readily observable above 71% of Earth’s surface in aquatic systems, in particular, shallow marine reef environments. As visible light interacts with aquatic surface waves, time-dependent nonlinear optical aberrations appear, forming caustic bands of light on the seafloor, and producing refractive lensing that magnifies and demagnifies underwater objects. This research extensively explores this phenomenon in the context of ocean waves, or the ocean wave fluid lensing phenomenon, and develops and validates a novel high-resolution aquatic remote sensing technique for imaging through ocean waves called the General Fluid Lensing Algorithm. Surface wave distortion and optical absorption of light pose a significant challenge for remote sensing of underwater environments, compounding an already profound lack of knowledge about our planet’s most commonplace, biologically diverse, and life-sustaining ecosystems. At present, no remote sensing technologies can robustly image underwater objects at the cm-scale or finer due to surface wave distortion and the strong attenuation of light in the water column, in stark contrast to modern terrestrial remote sensing capabilities. As a consequence, our ability to accurately assess the status and health of shallow marine ecosystems, such as coral and stromatolite reefs, is severely impaired. As ocean acidification, global warming, sea level rise, and habitat destruction increasingly impact these ecosystems, there is an urgent need for the development of remote sensing technologies that can image underwater environments at the cm-scale, or ‘reef-scale’, characteristic of typical reef accretion rates of ~1cm per year. The ocean wave fluid lensing phenomenon is modeled in a full-physical controlled computational environment, the Fluid Lensing Test Pool, to study the complex relationships between light and ocean waves and uncover patterns in caustic behavior and refractive lensing. Combined with an ocean wave fluid lensing theory, observed patterns are used to develop the General Fluid Lensing Algorithm. The General Fluid Lensing Algorithm not only enables robust imaging of underwater objects through refractive distortions from surface waves at sub-cm-scales, but also exploits surface waves as magnifying optical lensing elements, or fluid lensing lenslets, to enhance the spatial resolution and signal-to-noise properties of remote sensing instruments. The algorithm introduces a fluid distortion characterization methodology, caustic bathymetry concepts, Fluid Lensing Lenslet Homography technique, and a 3D Airborne Fluid Lensing Algorithm as novel approaches for characterizing the aquatic surface wave field, modeling bathymetry using caustic phenomena, and robust high-resolution aquatic remote sensing. Results from the Fluid Lensing Test Pool reveal previously unquantified depth-dependent caustic behavior including caustic focusing and the formation of caustic cells. Caustic focusing shows that, in the case of the Test Pool, the intensity of a caustic band at a depth of 2.5m can exceed the above-surface ambient intensity at 0m depth, despite two absorptive optical path lengths in the fluid. The Test Pool further incorporates a number of multispectral resolution test targets to validate the General Fluid Lensing Algorithm, used to quantitatively evaluate the algorithm’s ability to robustly image underwater objects. 2D Fluid Lensing results demonstrate multispectral imaging of test targets in depths up to 4.5m at a resolution of at least 0.25cm versus a raw fluid-distorted frame with a resolution less than 25cm. Enhanced signal-to-noise ratio gains of over 4dB are also measured in comparison to a perfectly flat fluid surface scenario with less than one-second of simulated remotely-sensed image data. These results show the application of the General Fluid Lensing Algorithm to addressing the surface wavedistortion and optical absorption challenges posed by aquatic remote sensing. In addition to the theoretical and algorithmic components, this thesis demonstrates the 3D Airborne Fluid Lensing Algorithm from unmanned aerial vehicles (UAVs, or drones) in real-world aquatic systems at depths up to 10m. Airborne Fluid Lensing campaigns were conducted over the coral reefs of Ofu Island, American Samoa (2013) and the stromatolite reefs of Shark Bay, Western Australia (2014). Fluid Lensing datasets reveal these reefs with unprecedented resolution, providing the first validated cm-scale 3D image of a reef acquired from above the ocean surface, without wave distortion, in the span of a few flight hours over areas as large as 15km2. These 3D data [JA1]distinguish coral, fish, and invertebrates in American Samoa, and reveal previously undocumented, morphologically distinct, stromatolite structures in Shark Bay. The data represent the highest-resolution remotely-sensed 3D multispectral image of an underwater environment to date, acquired from above a nonplanar fluid interface. Airborne field campaign results, along with validation results from the simulated Fluid Lensing Test Pool, suggest the General Fluid Lensing Algorithm presents a promising advance in aquatic remote sensing technology for large-scale 3D surveys of shallow aquatic habitats, offering robust imaging at sub-cm-scale spatial resolutions, fine temporal sampling on the order of seconds, and enhanced signal-to-noise properties.
Verification and Proof of Concept
Utilizing perturbations along a fluid surface to enhance optical performance
Fluid Lensing has been tested in a number of different environments for verification and proof of concept. The results of these tests were used to assess the algorithms potential use in large coastal field campaigns, remote sensing missions and other scientific applications. A few of the initial results from these tests are presented here. A number of fluid simulations were conducted to test robustness and quantify the algorithm’s performance as part of Ved Chirayath’s dissertation completed in 2016.
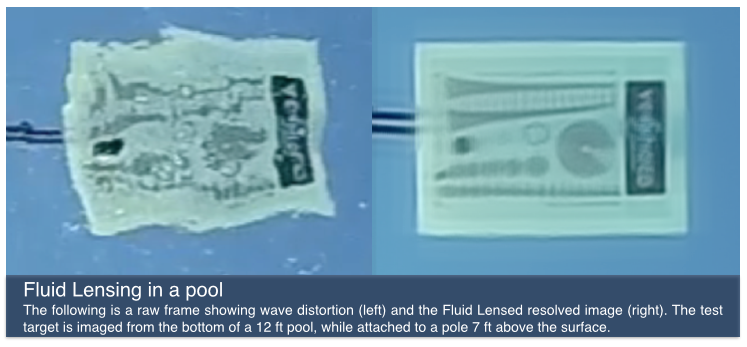
Underwater Test Target
The following tests were conducted in a standard recreational swimming pool using a 22”x15” test target, positioned at a depth of 12 feet from the surface of the pool. A single raw image from the captured video feed is shown on the left, and the post-processed image after Fluid Lensing is displayed on the right.
Mission Blue, led by Dr. Sylvia Earle, recently highlighted Fluid Lensing and its potential for mapping shallow reef ecosystems around the world in their latest technology exclusive by Brett Garling.